Основні нелінійності електромеханічних систем й їхніх систем керування
При розгляді поведінки електромеханічних систем ЕМС у перехідних режимах, необхідно приймати в увагу нелінійності, властиві як самої ЕМС (перетворювачі, електричні двигуни, робочі машини), так й її системі керування.
Нелінійності в системах ЕП можуть бути обумовлені наступними факторами:
1. Нелінійності механічних характеристик електродвигунів
Наприклад: механічні характеристики асинхронних двигунів, двигунів постійного струму послідовного й змішаного збудження (ДПС ПЗ і ЗЗ).
2. Нелінійності, обумовлені характеристиками навантаження (статичного моменту).
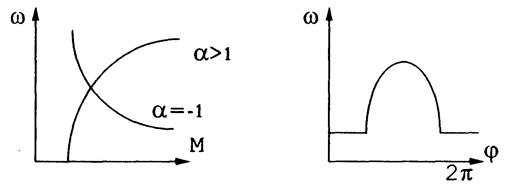
Наприклад: вентиляторна характеристика турбомеханизмів (a > 1); характеристики металорізальних верстатів (a = -1);
ножиці для різання металу (Мст= f(φ) кутового положення ротора).
3. Нелінійності, обумовлені конструкцією й властивостями механічної передачі. Типовим прикладом є наявність у передачах зазорів і люфтів, нелінійність характеристики з'єднання між валами.
4. Нелінійності, обумовлені силами тертя.
а) внутрішнє грузле тертя визначається силами діючими в підшипниках і з'єднаннях. Для підшипника ковзання в діапазоні малих швидкостей МСТ=βw); при більших w більш точної є нелінійна залежність (рис.а);
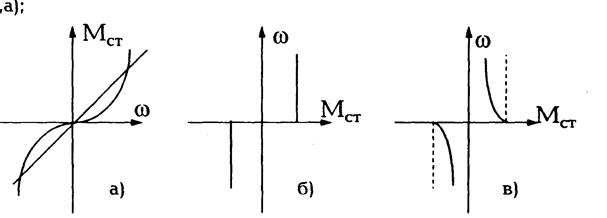
б) кулонівське тертя реактивний момент опору (рис. б);
в) сухе тертя. Нелінійні криві іноді приблизно заміняють прямими с негативним нахилом (рис. в).
5. Нелінійності, обумовлені елементами системи ЕП. Сюди відносяться нелінійні елементи, за допомогою яких здійснюється струмове відсічення в замкнутих САК ЕП:
Також необхідно враховувати нелінійність, обумовлену обмеженою величиною лінійної ділянки роботи елементів САК, таких як магнітні підсилювачі та напівпровідникові суматори, які мають область насичення.
6. Нелінійності функціональних впливів.
Нелінійності типу добутку двох функцій; квантування за рівнем і часом у цифрових САУ.
7. Нелінійності, обумовлені властивостями ТП:
Нелінійність регулювальної характеристики; наявність зони переривчастих струмів; неповна керованість ТП і т.п.
|
Розглянуті нелінійності є основними, але не вичерпують усього різноманіття нелінійностей. В ЕМС може перебувати відразу декілька нелінійностей і необхідно виділити найбільш важливі, що впливають на показники роботи досліджуваного об'єкта.
Нелінійні залежності ЕМС діляться на основні групи:
- аналітичні;
- неаналітичні.
Аналітичні - такі, які можуть бути представлені системою кусочно-безперервних рівнянь, які безпосередньо вносяться в програму.
Такі нелінійності в програмі представляються у вигляді сукупності операторів присвоювання й логічних функцій.
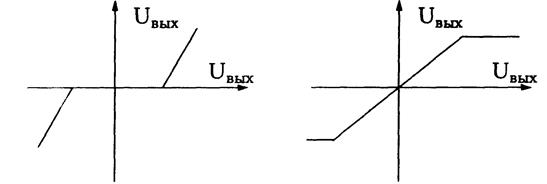
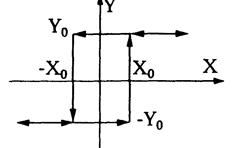
1. Нелінійність типу "обмеження"
| 
|
nen sign - знакова функція
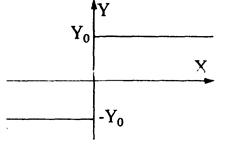
2. Нелінійність типу "ідеальне реле"
| 
|
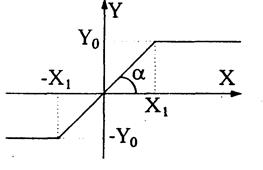
3. Нелінійність типу "зона нечутливості"
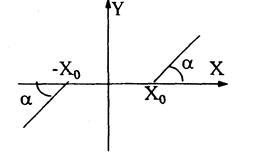
| 
|
тут  .
.
4. Нелінійність типу "реальне реле" або "реле с зоною нечутливості"
| 
|
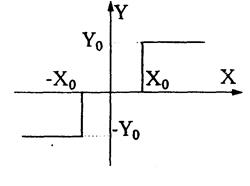
4. Нелінійність типу "прямокутної петлі гістерезису"
| 
|
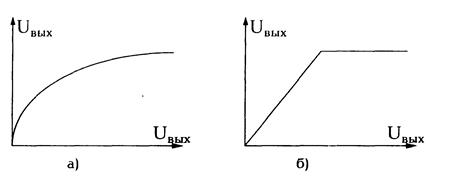
Неаналітичні нелінійності - такі, які не можуть бути описані аналітичними вираженнями.
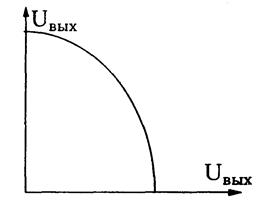
Найбільш типовий, широко розповсюджений приклад - крива намагнічування.
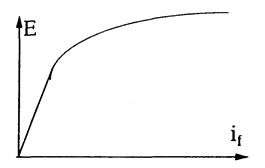
Початкова ділянка практично пряма, далі -крива.
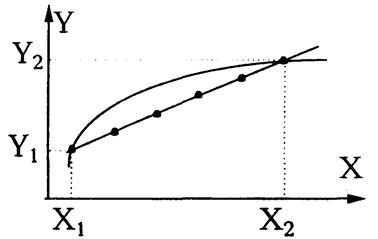
Існує два основних методи обробки неаналітичних нелінійностей:
1. Інтерполяція. Нелінійність при цьому задається у вигляді таблиці своїх значень у дискретних крапках, а значення функції в проміжних крапках здійснюється за допомогою різних інтерполяційних алгоритмів.
Найпростіший - лінійна інтерполяція, але дуже неточна й вимагає великої кількості вузлів.
Методи: Лагранжа, Ньютона, Стерлінга й ін.
2. Апроксимація. За допомогою відомих чисельних методів (наприклад - найменших квадратів) перебуває аналітичне вираження для нелінійності, тобто ця відомість до аналітичної нелінійності. Наприклад, криві намагнічування дуже погано піддаються апроксимації.
Для кривий нормованої й у відносних одиницях.
| if, в.о. | 0.58 | 1.0 | 1.5 | 2.0 | 2.5 | 3.0 | 3.5 |
| Е, в. о. | 0.05 | 1.0 | 1.21 | 1.33 | 1.4 | 1.46 | 1.51 |
для функції виду
 ;
;
 ,
,
де а, b - коефіцієнти апроксимації
Дата добавления: 2021-01-11; просмотров: 793;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- I Этапы развития САSЕ-систем
- I. История возникновения и развития классно-урочной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
