Человек – машина» как одна из главных тем современного дизайна
Человек – машина. Живой организм – машина.Оппозиция и сочетание этих «полюсов» – одна из главных тем современного дизайна. Машина дает человеку возможности быть более «сильным» физически и использовать новейшии технологии в экстремальных условиях, чтобы повысить шансы на выживание, например, на войне. Однако – и это уже понятно ученым сегодня – человек всегда будет, например, сообразительнее машины, т.к. человек – живой, а машины – лишь вещь. Вложить в машину жизнь, как это сделала природа, у людей не получится никогда. Да это и не нужно. Машины – лишь вещь, которая разработана для того, чтобы человеку было легче жить. У человека есть чувства, интеллект, жизнь. У машины «интеллект» – лишь программы, разработанные для нее человеком.
Технологические задачи и этические вопросы бионического проектирования.Система человек – машина активно изучается учеными. Главный этический вопрос бионического проектирования – это можно ли совмещать элементы тела человека и элементы машины, насколько это правомерно, и как классифицировать полученную то ли машину, то ли живое существо. На сегодня этот вопрос является очень сложным, но некоторые решения все же найдены (мы их рассмотрим далее на примерах).
Проектирование машин для человека, кроме очевидных и уже названных выше, имеет и социальный аспект. Люди с ограниченными возможностями остро нуждаются в помощи ученых: ведь многие люди, ставшие инвалидами во время войны и иных конфликтов, теряют возможность жить так же полноценно в современном обществе, как раньше. Ученые стараются разрабатывать машины - протезы органов и других элементов человеческого тела. Конечно, искусственный орган не имеет всех свойств живого, но все же его использование является выходом для инвалида. Примером удачной разработки может быть человеческая рука, созданная для женщины, лишившейся руки на войне. Подобные «бионические руки» апробированы и уже производятся на заказ.
Торжество бионики: первая женщина с бионической рукой.Ученым из Института реабилитации Чикаго удалось создать бионический протез, который позволяет пациенту не только управлять рукой с помощью мыслей, но и распознавать некоторые ощущения. Обладательницей бионической руки стала Клаудиа Митчелл (Claudia Mitchell), в прошлом служившая в морском флоте США. В 2005 году Митчелл пострадала в аварии. Хирургам пришлось ампутировать левую руку Митчелл по самое плечо. Как следствие, нервы, которые могли бы быть в дальнейшем использованы для контроля над протезом, остались без применения.
Проект бионической руки разработан учеными Института реабилитации Чикаго и финансируется в рамках большого проекта, основанного DARPA – Агентством передовых оборонных исследований (рис. 84).

Рис. 84. Первая женщина с бионической рукой
Митчелл может управлять искусственной рукой с помощью мыслей о необходимом движении. Однако на этом ученые не стали останавливаться. Следующей целью для них стало распознавание ощущений рукой. Они пересадили бездействующие после ампутации нервы Клаудиа Митчелл из поврежденной области плеча в грудную мышцу, которая стала получать сигналы от бионической руки. Это позволяет процессору протеза обеспечивать Митчелл такие же тактильные ощущения, какие могли быть у здоровой руки.
В результате, когда Клаудиа Митчелл хочет сделать движение рукой, она просто думает об этом, нервные импульсы («слабые» электрические импульсы) из мышцы проходят в бионический протез, где процессор расшифровывает их и трансформирует в движение. Дотрагиваясь до горячей чашки или холодного окна, Клаудиа может чувствовать тепло или холод.
Новинки «техно-биодизайна» – результаты взаимодействия форм, структур, материалов и функций живых организмов и техники.Робот-змея ACM-R5 японской лаборатории умеет не только ползать, но и плавать. Принцип его движения уникален, и в будущем такие роботы смогут решать широкий спектр задач (рис. 85).
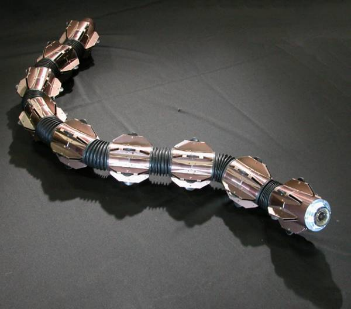
Рис. 85. Робот-змея ACM-R5
Робот разработан Hirose Fukushima Robotics Lab. Робот состоит из 9 сегментов. Вес робота (9 сегментов) 7,5 кг, длина 1750 мм, диаметр 80 мм (без лопаток). Сегменты одновременно выполняют роль скелета и наружного покрова. Каждый сегмент оснащен специальными лопатками с колесами, которые помогают передвигаться как по суше, так и по воде.
Каждый из сегментов автономен: имеет свой элемент питания, электродвигатель и процессор. Электродвигатель позволяет сегментам изгибаться со скоростью 70 градусов в секунду. При соединении сегментов создатели робота самостоятельно определяют их количество и порядковый номер относительно головы робота. Это дает гибкость в использовании робота, т.к. можно выбрать количество сегментов в зависимости от выполняемой задачи. При конструировании робота было решено огромное количество проблем и, в будущем, такие роботы обязательно займут свое место.
Дата добавления: 2016-08-06; просмотров: 3391;
Поиск по сайту
Узнать еще
- A. Повышение температуры кипения
- A. Трубопроводная обвязка окружения испарителя.
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
