СПЕЦИАЛИЗИРОВАННЫЕ ГРУЗОЗАХВАТНЫЕ УСТРОЙСТВА
Специализированные грузозахватные устройства (захваты), как правило, навешивают на крюк или скобу грузоподъемного крана. Закрепление груза в захвате может осуществляться такелажником с помощью строп, крановщиком за счет дистанционного управления захватом, а также автоматически при опускании захватного устройства на груз. Возникающие в стропах усилия зависят от веса поднимаемого груза Q и от угла наклона строп.
Усилие в ветви двухветвевого стропа (рис. 3.1, а)
 (3.1)
(3.1)
где  – масса поднимаемого груза;
– масса поднимаемого груза;
g – ускорение силы тяжести;
α – угол отклонения ветви стропа от вертикали.
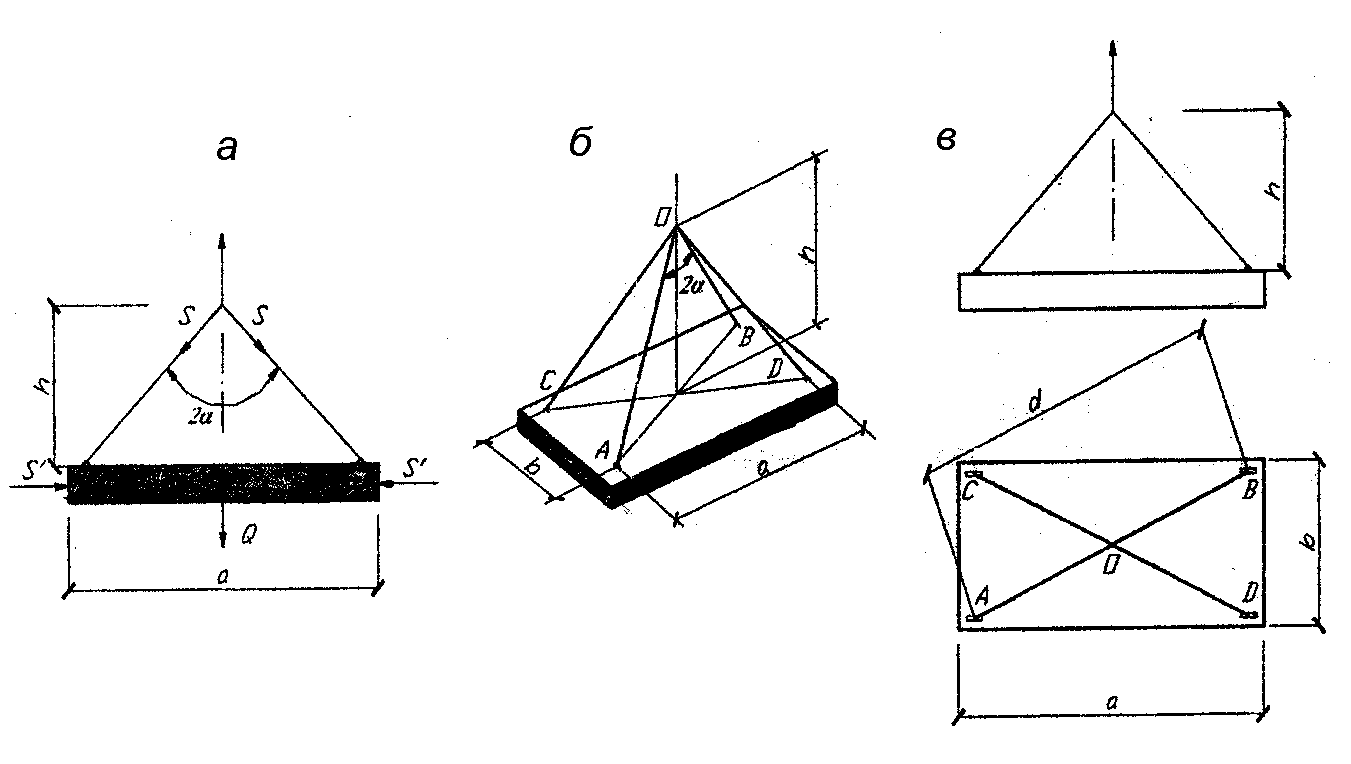
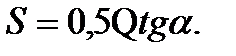
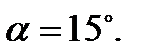
Рис. 3.1. Строповка грузов:
а – двухветвевым стропом; б – четырехветвевым стропом;
в – схема расчета к примеру
Увеличение угла а приводит к возрастанию усилий в ветвях стропа и к увеличению сжатия поднимаемого груза.
Усилие, сжимающее груз.
Усилие в ветви многоветвевого стропа
 (3.2)
(3.2)
где z – число ветвей стропа.
Пример 3.1.Подобрать четырехветвевой строп для подъема плит перекрытий массой до 5,7 т. Необходимые для расчета размеры (рис. 3.1, б): а – 2,6 м; b = 5,6 м; h = 1,5 м.
Решение.Расстояние меду точками АВ

Длина стропа АОВ

Угол между стропами и вертикалью 

Усилие в ветви стропа
Разрывное усилие в стропе при коэффициенте  ;
;

По ГОСТ 3070-74 подбираем канат ТК 6×19+1о.с. маркировочной группы по временному сопротивлению разрыву 1600 МПа с разрывным усилием 99 кН диаметром dk = 14,5 мм.
Многоветвевые стропына траверсе часто выполняют с четырьмя или двумя стропами (рис. 3.2). Стропы подбирают по растягивающим усилиям, а поперечные размеры траверсы определяют расчетом на изгиб (рис. 3.2, а) или на изгиб и одновременное сжатие (рис. 3.2, б).
Усилие в наклонной тяге
где Q – вес груза;
G – вес траверсы.
Усилие, сжимающее траверсу,
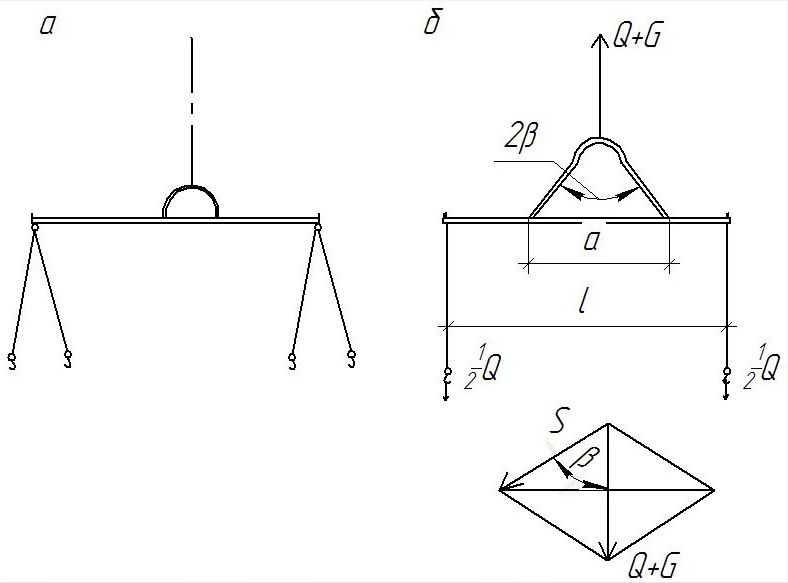
Рис. 3.2. Траверса со стропами:
а – со скобой для навешивания на крюк крана;
б – с наклонными тягами
Изгибающие моменты в сечениях траверсы у мест закрепления тяг

Для траверсы без тяг
Поперечное сечение траверсы, состоящей из швеллеров или прокатной угловой стали, определяют из уравнения
где  и F – соответственно момент сопротивления и площадь поперечного сечения траверсы.
и F – соответственно момент сопротивления и площадь поперечного сечения траверсы.
Клещевые захватывыполняют в виде рычажных систем с загнутыми свободными концами (рис. 3.3, а). Для удерживания клещевого захвата в раскрытом положении служат защелки. Устройства, обеспечивающие захват грузов и их освобождение без участия такелажника, являются автоматическими. В полуавтоматических захватах только одна из операций (закрепление груза в захвате или его освобождение) выполняется автоматически.
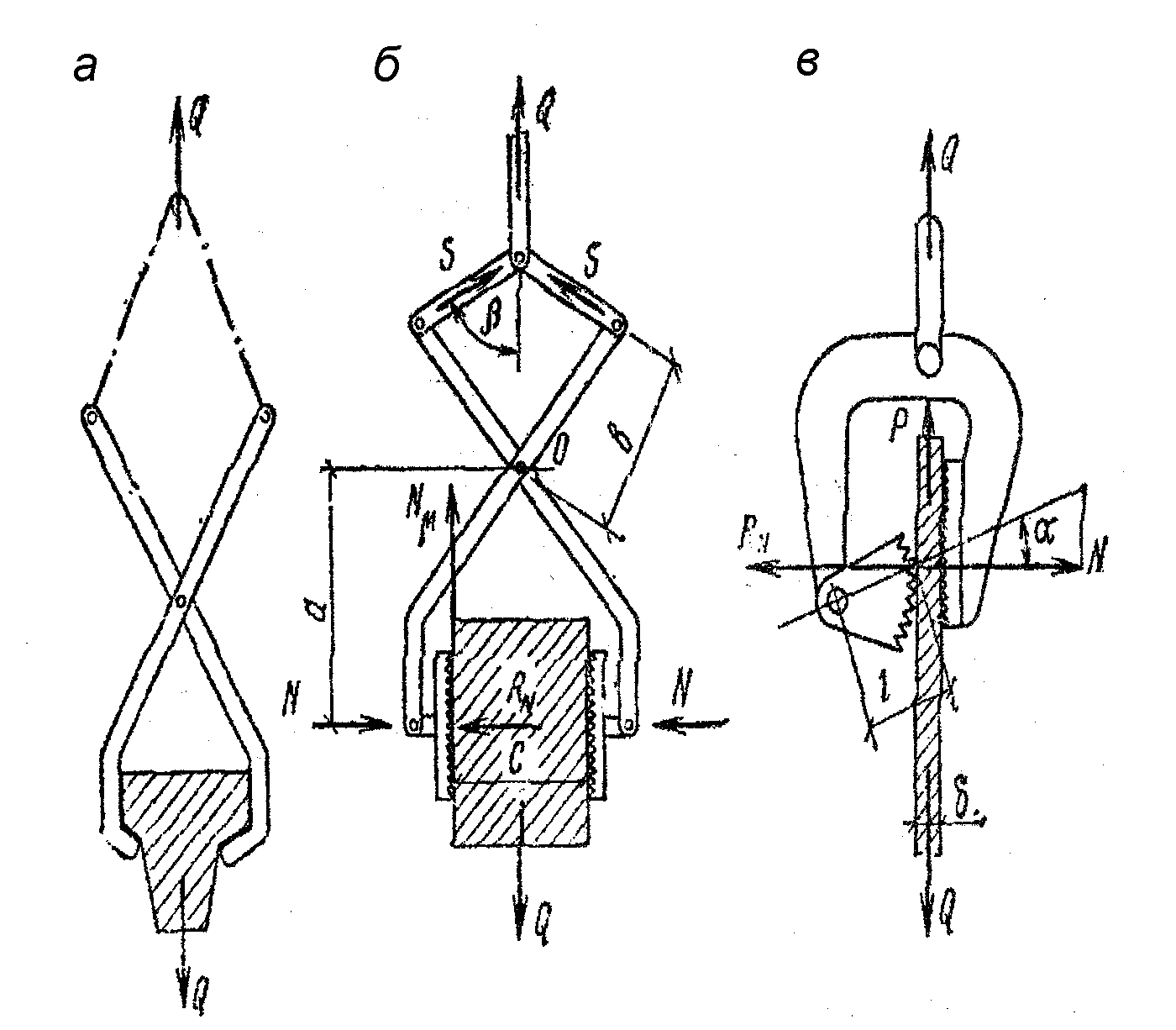
Рис. 3.3. Зажимные захваты:
а – клещевой; б – рычажной фрикционный;
в – эксцентриковый фрикционный
Рычажные фрикционные захватыудерживают груз силами трения между боковыми поверхностями грузов и прижимными колодками, шарнирно присоединенными к свободным концам рычагов (рис. 3.3, б).
Необходимая сила прижатия каждой колодки
где  – коэффициент запаса (
– коэффициент запаса (  = 1,1–1,25);
= 1,1–1,25);
µ – коэффициент трения между поверхностями колодок и груза (µ = 0,12–0,15 – гладкая металлическая колодка по металлической поверхности груза; µ = 0,3–0,4 – то же по дереву; µ=0,4–0,5 – рифленая металлическая поверхность колодки по металлу; µ = 0,6–0,7 – то же по бетону).
Уравнение равновесия одного из рычагов относительно шарнира О имеет вид
тогда
Усилие в подъемном канате с учетом веса захвата
откуда
Эксцентриковые фрикционные захватыприменяют преимущественно для перегрузки и транспортировки в вертикальном положении листовых материалов (рис. 3.3, в). Усилие распора N и равная ему реактивная сила Rm создают силы трения, действующие между зажимаемым листом и эксцентриком µ1, атакже между листом и задней стенкой захвата µ2.
Сила, удерживающая груз,
Для стальных листов µ =0,15; µ =0,1. Толщина листов δ = 6–36 мм.
Уравнение моментов действующих сил относительно оси эксцентрика

откуда

или
что позволяет определить основные параметры захвата.
Дата добавления: 2016-08-06; просмотров: 3217;
Поиск по сайту
Узнать еще
- II. Особенности политического устройства Ирана
- Table 1. Функции ГИС для лесного хозяйства и лесоустройства
- VI. КОМБИНАЦИОННЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- VI. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- XLII. ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА
- А. Электронные устройства на ОУ
- Автоматические контрольные устройства
- Активный контроль заготовок до обработки. Блокирующие устройства

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
