МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ
Основные схемы механизмов передвижения и ходовых устройств.Самоходные и передвижные строительные машины могут быть смонтированы на автомобилях, тракторах или же иметь собственные ходовые устройства: колесное, гусеничное, шагающее.
Колесный ход может быть рельсовым (башенные, козловые, мостовые краны) и безрельсовым. Последний выполняется на металлических (обрезиненных) и пневматических колесах. Пневмоколесами оснащаются многие погрузчики, стреловые краны и универсальные экскаваторы. При этом увеличивается срок их службы и повышается сцепление колес с дорогой. Проходимость таких машин в условиях бездорожья обеспечивается применением шин сверхнизкого давления 0,05–0,08 МПа. Рельсовый ход обеспечивает хорошую работу механизма передвижения. Его недостатки – необходимость устройства подкрановых путей и невозможность изменять направление движения крана без их перекладки.
Гусеничное ходовое оборудование имеет большую площадь соприкосновения с грунтом, небольшое удельное давление на грунт и вследствие этого обеспечивает машине хорошую проходимость. Гусеницами оснащаются самоходные краны, погрузчики, экскаваторы. Для работы машин на слабых и сильно переувлажненных грунтах применяются уширенные гусеницы.
Еще более низкое удельное давление машины на грунт обеспечивает шагающее оборудование, которым оснащаются крупные экскаваторы.
При одномоторном приводе (рис. 6, а, б) вращение от двигателя 1 через редуктор отбора мощности 2, гидротрансформатор 4, коробку передач 5 и карданные валы 3 передается переднему 6 и заднему 11 ведущим мостам. Главные передачи и дифференциалы 7 и 10 обеспечивают передачу крутящих моментов через ступичные редукторы 8 и 9 на ведущие колеса тягача.
От горизонтального вала одноковшового экскаватора вращение конической парой 11 передается вертикальному валу 12, проходящему по оси вращения поворотной платформы. От вертикального вала механизма передвижения конической парой 13, продольным валом 14 и конической парой 15 вращение передается на среднюю часть поперечного вала. Выключением одной из зубчатых муфт 16 или 17 обеспечивается разворот гусеничного хода.
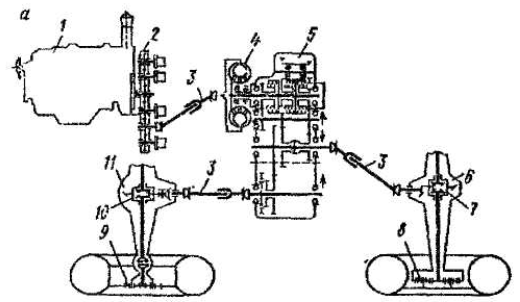
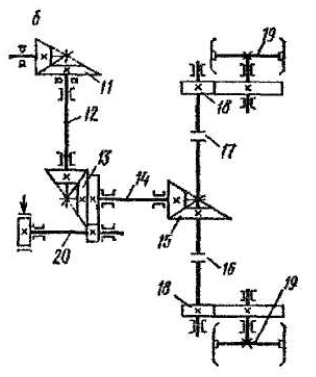
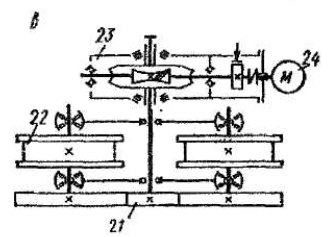
Рис. 6.1. Кинематические схемы ходовых устройств:
а – пневмоколесного; б – гусеничного; в – колесно-рельсового
При включенных муфтах зубчатыми передачами 18 вращение передается ведущим звездочкам 19 гусеничного хода. Для затормаживания ходового механизма служит ленточный тормоз, установленный на валу 20.
В механизме привода ходовой тележки башенного крана вращение от электродвигателя 24 через червячный редуктор 23 и зубчатую передачу 21 передается на ходовые катки 22.
Широкое распространение получили мотор-колеса с встроенными гидравлическими или электрическими двигателями, а также ходовые устройства с индивидуальными гидро- или электродвигателями, приводящими в движение через планетарные редукторы ведущие колеса или звездочки.
Расчет механизма передвижения.Расчет ходового устройства включает определение сопротивлений передвижению крана с учетом преодоления сил трения, уклона и ветровой нагрузки; определение потребной мощности привода; подбор и проверку двигателя на перегрузочную способность; определение передаточного числа передачи; составление принципиальной схемы передаточного механизма или подбор стандартного редуктора; выбор места на схеме передачи для установки тормоза, определение тормозного момента; выбор типа тормоза и растормаживающего устройства.
Определение сопротивления передвижению. Общее сопротивление передвижению крана представляет собой сумму сопротивлений
W=W1+W2+W3+W4 , (6.1)
где W1, W2, W3, W4 – сопротивления, возникающие соответственно от сил трения, уклона, ветровой нагрузки, инерционных сил.
Сопротивление передвижению от сил трения для колесных и гусеничных машин
W1 =  (6.2)
(6.2)
где  – удельное сопротивление движению, т.е. отношение тягового усилия к силе тяжести (см. табл. 1.3);
– удельное сопротивление движению, т.е. отношение тягового усилия к силе тяжести (см. табл. 1.3);
G – сила тяжести.
Сопротивление передвижению от сил трения для кранов с двухребордным колесно-рельсовым ходом вычисляют по формуле
W1  (6.3)
(6.3)
где β – коэффициент, учитывающий сопротивление трению реборд о рельсы (β= 1,25–1,4 при подшипниках скольжения, β=2,5–5,2 при подшипниках качения);
 – удельное сопротивление движению,
– удельное сопротивление движению,
где  – коэффициент трения в подшипниках колес (
– коэффициент трения в подшипниках колес (  –0,1–0,12 при подшипниках скольжения, = 0,01–0,015 при подшипниках качения);
–0,1–0,12 при подшипниках скольжения, = 0,01–0,015 при подшипниках качения);
f – коэффициент трения качения (f  0,0005);
0,0005);
D – диаметр ходового колеса;
d – диаметр шейки оси.
Сопротивление преодолению уклона определяют по формуле
W2=  (6.4)
(6.4)
где  – удельное сопротивление преодолению уклона, принимается равным уклону.
– удельное сопротивление преодолению уклона, принимается равным уклону.
Сопротивление передвижению от ветровой нагрузки считают по формуле
W3=Fpвеmpkαkp, (6.5)
где pвеmp – удельная ветровая нагрузка принимается равной 150 Па;
F – подветренная площадь;
kα – коэффициент аэродинамического сопротивления, принимается равным 1–1,4;
kp – коэффициент решетчатости, принимается равным 0,4–1.
Сопротивление преодолению инерционных сил
W4=GV/(  t), (6.6)
t), (6.6)
где V – скорость передвижения машины, м/с;
t – время разгона (  1–3 с).
1–3 с).
Машина находится в движении без пробуксовывания при условии, что сцепная сила тяги больше окружного усилия на ободе ведущего колеса (звездочки) общего сопротивления передвижению, т.е.
 , (6.7)
, (6.7)
где  – сцепной вес;
– сцепной вес;
 – коэффициент сцепления с поверхностью пути (табл. 6.1);
– коэффициент сцепления с поверхностью пути (табл. 6.1);
 – окружное усилие на ободе ведущих колес (звездочек).
– окружное усилие на ободе ведущих колес (звездочек).
Сцепной вес определяется как сумма давлений на ведущие колеса или гусеницы. Сцепной вес автомобилей грузоподъемностью до 3 т
 ,
,
где  – вес автомобиля;
– вес автомобиля;
 – вес груза.
– вес груза.
Сцепной вес автомобилей грузоподъемностью более 3 т
 .
.
Сцепной вес бульдозера принимается равным весу бульдозера.
Таблица 6.1
Коэффициент сцепления  с поверхностью пути
с поверхностью пути
| Характеристика пути | Железнодорожный ход | Пневмоколесный ход | Гусеничный ход | |
| без шпор | со шпорами | |||
| Рельсы: | ||||
| сухие | 0,15–0,2 | - | - | - |
| влажные | 0,1–0,12 | - | - | - |
| Плотный грунт: | ||||
| сухой | - | 0,6 | 0,9 | |
| влажный | - | 0,3 | 0,8 | 0,9 |
| Бетонное | ||||
| покрытие: | ||||
| сухое | - | 0,6 | 0,4 | 0,7 |
| обледеневшее | - | 0,18 | 0,3 | 0,6 |
| замерзшее | - | 0,21 | 0,4 | 0,8 |
| оттаявшее | - | 0,15 | 0,2 | 0,4 |
Определение потребной мощности привода
Мощность двигателя, кВт,
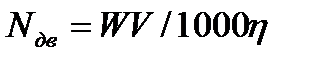 , (6.8)
, (6.8)
где  – сопротивление передвижению, Н;
– сопротивление передвижению, Н;
 – КПД передачи от двигателя к ходовому колесу, звездочке гусеничного хода.
– КПД передачи от двигателя к ходовому колесу, звездочке гусеничного хода.
Подбор двигателя и проверка его
на перегрузочную способность
В период неустановившегося движения (пуска, торможения) возникают моменты, отличающиеся от статического. Пусковой момент на валу двигателя
 ,(6.9)
,(6.9)
где  – статический момент на валу двигателя;
– статический момент на валу двигателя;
 – динамический момент на валу двигателя от поступательно движущихся масс;
– динамический момент на валу двигателя от поступательно движущихся масс;
 – динамический момент, учитывающий действие инерционных сил элементов привода,
– динамический момент, учитывающий действие инерционных сил элементов привода,
где  – диаметр ходового колеса (звездочки);
– диаметр ходового колеса (звездочки);
 – КПД передачи;
– КПД передачи;
 – передаточное число;
– передаточное число;
 – частота вращения валов двигателя и колеса (звездочки);
– частота вращения валов двигателя и колеса (звездочки);
 – табличное значение момента инерции двигателя.
– табличное значение момента инерции двигателя.
Номинальный момент на валу двигателя, Нм,
 .
.
При проверке двигателя на перегрузочную способность сравнивают найденное значение  с допустимым максимальным табличным значением
с допустимым максимальным табличным значением  . Подобрав двигатель и проверив его на перегрузочную способность в период пуска по передаточному числу и передаваемой мощности по таблицам, подбирают стандартный редуктор или проектируют вновь систему передач.
. Подобрав двигатель и проверив его на перегрузочную способность в период пуска по передаточному числу и передаваемой мощности по таблицам, подбирают стандартный редуктор или проектируют вновь систему передач.
Дальнейший расчет ведется по методике, аналогичной методике расчета грузоподъемного механизма.
Определение давления на опоры. Для четырехколесного ходового устройства при симметричном подвешивании груза и равномерном распределении нагрузки давление на каждое колесо (рис. 6.2, а) составляет
 , (6.10)
, (6.10)
где  – вес тележки;
– вес тележки;
Q – вес груза.
При несимметричном подвешивании груза (рис. 6.2, б) давление на каждое колесо
 (6.11)
(6.11)
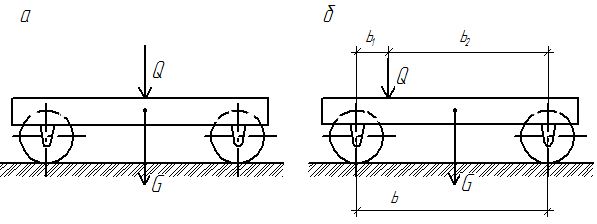
Рис.6.2. Схемы к определению давлений на опоры
При неравномерном распределении груза, при смещении равнодействующей вертикальных нагрузок, давление на наиболее нагруженную опору определяется по формулам:
при работе на неровной местности (на каменистых грунтах)
 ; (6.12)
; (6.12)
при работе на выровненной площадке (рис. 6.2, в)
 . (6.13)
. (6.13)
Для машин, которые могут опрокинуться при работе, максимальная нагрузка на одну опору
 . (6.14)
. (6.14)
Для гусеничного хода при прохождении равнодействующей вертикальных нагрузок через центр опорной площади удельное давление на грунт равномерное.
 , (6.15)
, (6.15)
где  – равнодействующая вертикальных нагрузок;
– равнодействующая вертикальных нагрузок;
 – число опорных гусениц;
– число опорных гусениц;
 - ширина гусеницы;
- ширина гусеницы;
 – длина опорной поверхности гусеницы;
– длина опорной поверхности гусеницы;
 – допускаемое значение удельного давления на грунт.
– допускаемое значение удельного давления на грунт.
При смещении равнодействующей вертикальных нагрузок (в зависимости от величины смещений) удельное давление на грунт определяется по формулам:
при возможности опрокидывания машины
 , (6.16)
, (6.16)
где  – ширина гусеницы;
– ширина гусеницы;

 – ширина одного эвена гусеницы;
– ширина одного эвена гусеницы;
для машин, имеющих шарнирно укрепленные гусеничные тележки,
 , (6.17)
, (6.17)
где – ширина одной гусеницы;
– длина опорной части одной гусеницы;
 – число гусениц одной тележки.
– число гусениц одной тележки.
Давление по эллиптическому следу баллона пневмоколесного хода распределяется практически равномерно. Нагрузка на баллон (рис. 6.2, г)
 ,
,
где  – коэффициент, учитывающий работу покрышки (
– коэффициент, учитывающий работу покрышки (  =1 – при повышенном давлении; =1,05 – при нормальном давлении; =1,3 – при пониженном давлении);
=1 – при повышенном давлении; =1,05 – при нормальном давлении; =1,3 – при пониженном давлении);
 – площадь эллипса, см
– площадь эллипса, см  ;
;
 – давление в камере.
– давление в камере.
Прогиб шины
 , (6.18)
, (6.18)
где  – полная ширина шины;
– полная ширина шины;
 – наружный диаметр шины;
– наружный диаметр шины;
 – допустимый прогиб.
– допустимый прогиб.
Пример 6.1.Определить мощность привода механизма передвижения крана на колесно-рельсовом ходу. Диаметр ходового колеса 400 мм. Распределение нагрузки на четыре колеса равномерное. Общая нагрузка 200 кН. Скорость передвижения 18 м/мин. Уклон пути 1,5°. Подветренная площадь крана 20 м2. Число ведущих колес 2.
Решение.Определение сопротивлений передвижению
 ,
,
где  – сопротивление от сил трения скольжения в подшипниках колеса;
– сопротивление от сил трения скольжения в подшипниках колеса;
 – сопротивление от сил трения качения колеса по рельсу. Из равенства моментов сил сопротивления и нагрузки на колесо
– сопротивление от сил трения качения колеса по рельсу. Из равенства моментов сил сопротивления и нагрузки на колесо  (рис. 6.3) получим
(рис. 6.3) получим
 и
и  ,
,
откуда
 и
и  .
.
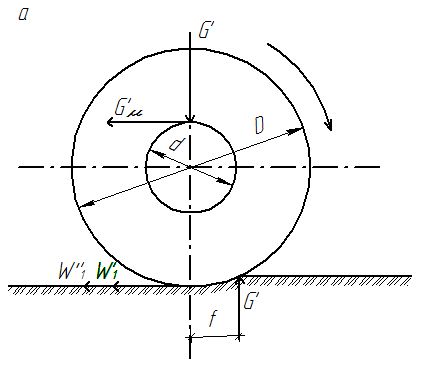
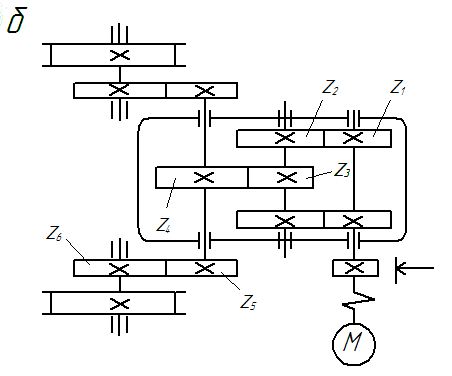
Рис. 6.3. Схемы к расчету механизма передвижения:
а – схема к определению сопротивлений от сил трения;
б – схема привода
Из формулы (6.2) удельное сопротивление движению
 ,
,
тогда без учета влияния реборд
 .
.
Предварительно принимаем диаметр шипа вала (оси) колеса
 =100 мм.
=100 мм.
При двухребордных колесах с подшипниками качения по формуле (6.3)

Сопротивление преодолению уклона по формуле (6.4) 
Сопротивление преодолению ветровой нагрузки по формуле (6.5) 
Сопротивление преодолению инерционных сил при t=3 c по формуле (6.6)

Общее сопротивление без учета действия инерционных сил

Потребная мощность привода

Мощность на валу двигателя
Подбираем электродвигатель переменного тока с фазным ротором типа МТ 112-6 мощностью 
 момент инерции
момент инерции  масса
масса 

Дата добавления: 2016-08-06; просмотров: 5635;
Поиск по сайту
Узнать еще
- III. Механизмы регуляции количества ферментов
- Безусловнорефлекторные, условнорефлекторные, гуморальные механизмы регуляции половых функций.
- Биологические и социальные аспекты старения. Генетические, молекулярные, клеточные, системные механизмы старения. Проблема долголетия.
- Биофизические механизмы транспорта вещества через биомембраны.
- Виды и механизмы коррозии стальных трубопроводов. Методы защиты МН от коррозии
- Виды, механизмы и цели познавательной деятельности
- Винтовые механизмы.
- Витамины- антиоксиданты: Е, А, участие в метаболических процессах, биохимические механизмы проявления гиповитаминозов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
