Реверсивные индуктивные датчики.
Включаются или по мостовой схеме (рис. 15а) или по дифференциальной (рис. 15б). Усилие, действующее на якорь, равно разности сил притяжения со стороны встречно включённых рабочих обмоток. В среднем положении якоря при наличии полной симметрии реверсивного датчика результирующее усилие равно нулю, а в других положениях якоря оно небольшое.
За начало отсчета перемещений берут среднее положение якоря, при котором схема будет уравновешена и падение напряжения на нагрузке UН = 0. При небольших отклонениях якоря напряжение UН возрастает. При изменении знака перемещения (переход якоря через среднее положение в противоположную сторону) фаза напряжения UН меняется на 180°.
В автоматике (в гироскопических устройствах) применяют также трансформаторный индуктивный датчик(рис. 15б).
На обмотку Wв, расположенную на среднем стержне, подается напряжение питания Uн, а с обмоток W1, и W2, которые расположены на крайних стержнях и которые соединены между собой так, что наводимые в них ЭДС имеют противоположную фазу, снимается напряжение нагрузки Uн (выходное напряжение). При симметричном положении якоря 1 ЭДС в обмотках W1 и W2равны между собой. В этом случае напряжение Uн = 0.
При смещении якоря 1 от симметричного положения в обмотках W1и W2создаются разные по значению ЭДС, в результате чего происходит изменение напряжения Uн. Фаза напряжения Uн(выходного напряжения) определяется знаком отклонения якоря от его симметричного положения.
Например, если сердечник датчика отклонится влево, то ЭДС Е2 уменьшится, так как зазор между правым стержнем сердечника и якорем увеличится, а. ЕДС Е1 не изменится, так как зазор между правым стержнем сердечника и якорем не изменится. В итоге Е2 станет меньше чем Е1 , т.е. Uн=Е1-Е2<0 и будет меньше иметь знак (+).
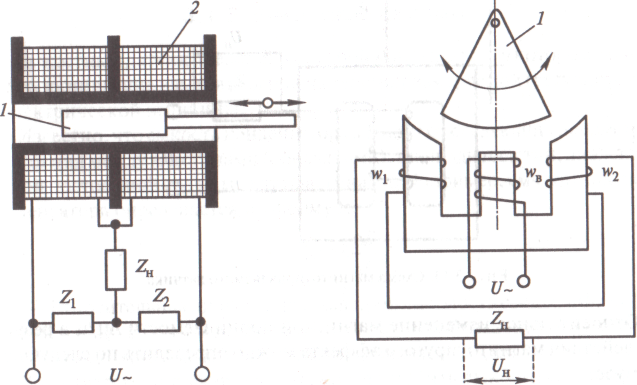
| Рис. 15. а) индуктивный датчик соленоидного типа. б) трансформаторный индуктивный датчик. 1 – якорь, 2 - обмотка |
| а |
| б |
Маятниковый датчик (рис. 15б.) или датчик углового положения используется для воздействия на сигнал или на управление машиной при отклонении машины от горизонтали. Например, в строительно-дорожных машинах этот датчик устанавливается на отвале и служит для измерения угла его наклона.
В настоящее время применяется большое количество индуктивных датчиков, отличающихся друг от друга по конструктивному и схемному исполнению.
К достоинствам рассмотренных реверсивных датчиков можно отнести большую, чем у нереверсивных датчиков, линейность статической характеристики; меньшую зависимость характеристики от колебаний напряжения, температуры и т. п.
Основным недостатком реверсивных датчиков является сложность регулировки (балансировки) датчика.
Рассмотренные датчики применяют для входных перемещений от 0,001 до 1 мм. Для перемещений от 1 до 60 мм применяют датчик соленоидного типа, включающийся по мостовой схеме (рис.15а). В этом датчике изменение индуктивности обмотки L, происходит за счет перемещения ферромагнитного сердечника 1 в катушке 2.
| Рис. 16. Схема индикатора уровня с трансформаторным индуктивным датчиком. |
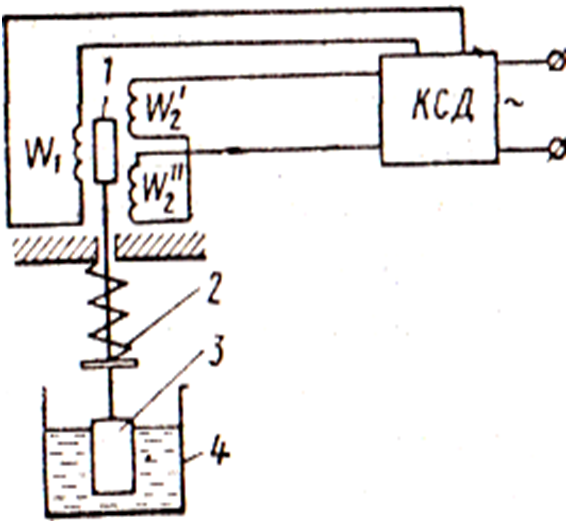 Принцип действия трансформаторного индуктивного датчикаразберем на примере индикатора уровня типа ДИУ-СЧА (рис.16).
Принцип действия трансформаторного индуктивного датчикаразберем на примере индикатора уровня типа ДИУ-СЧА (рис.16).
В корпусе 4, заполненном жидкостью, уровень которой контролируется, смонтирован буек 3, связанный жесткой тягой с сердечником 1 дифференциального трансформатора, и пружина 2 для уравновешивания выталкивающей силы.
Рассмотренные индуктивные датчики применяются в основном на частотах 3000...5000 Гц.
При изменении уровня жидкости изменяется положение буйка 3 и положение сердечника 1.
Пока сердечник 1 находится в средней части дифференциального трансформатора, в обмотках W2‘ и W2‘‘ индуктируются одинаковые э.д.с. Но обмотки включены встречно и разность потенциалов δU(на выходе трансформатора) равна нулю. Если сердечник 1 сместится вверх от нейтрального положения, то э. д. с., индуктируемая в обмотке W2‘, увеличится, а э. д. с. в обмотке W2‘‘уменьшится и на выходе появится сигнал δU. Величина сигнала δU измеряется и регистрируется прибором типа КСД-3.
Емкостные датчики.
Емкостный датчик представляет собой конденсатор, в котором емкостное сопротивление изменяется при изменении при изменении зазора δ между платинами.
Емкостные датчики с переменной активной площадью пластин часто применяют для измерения линейного и углового перемещения.
Известно, что емкость конденсатора зависит от расстояния между пластинам; площади пластин; диэлектрической постоянной среды между пластинами. Например, емкость плоского конденсатора определяется по формуле: С=0,088×ε×S/δ
где ε- относительная диэлектрическая проницаемость среды (для воздуха ε = 1);
S - активная площадь пластин конденсатора см2;
δ- расстояние между пластинами, см. рис 17.
| Rн |
| Рис 17. Емкостной датчик. |
| δ |
| Uвых |
| ~Uпит |
В соответствии с формулой можно построить емкостные датчики, в которых преобразование измеряемой неэлектрической величины будет происходить за счет изменения δ, S и ε.
Напряжение Uвых зависит от нагрузки Uвых=Iнагр×Rн
Ток нагрузки зависит от сопротивления емкости Хc.
При перемещении подвижной пластины вверх значение зазора δ уменьшается, что приводит к увеличению емкости датчика, при этом увеличится ток Iнагр в цепи датчика и увеличится напряжение Uвых на выходе датчика.
Для увеличения емкости применяют многоступенчатые емкостные датчики, которые выполняют из нескольких расположенных один под другим пластин.
Емкость таких датчиков в зависимости от конструкции равна от нескольких десятков до нескольких сотен пикофарад.
Рассмотренные датчики позволяют измерять малые перемещения (до десятых долей микрона).
Емкостный датчик с переменной активной площадью пластин представляет собой обычный воздушный конденсатор переменной емкости, в котором при повороте подвижной пластины по отношению к неподвижной пластине изменяется активная площадь пластин конденсатора, что приводит к изменению его емкости. Для увеличения чувствительности такого датчика применяют также многопластинчатые емкостные датчики.
К недостаткам емкостных датчиков следует отнести большое внутреннее сопротивление, влияние на работу датчика паразитных емкостей (требуется экранировка); необходимость усиления снимаемого сигнала; потребность источника напряжения высокой частоты; сильное влияние изменения температуры и влажности окружающей среды; для достижения максимальной чувствительности монтаж следует производить очень короткими проводами, а это не всегда удобно.
Основными достоинствами емкостных датчиков являются: высокая чувствительность, отсутствие подвижных трущихся деталей; простота конструкции, малые размеры и масса; малый собственный момент; малая инерционность.
Емкостные датчики широко применяют в автоматике для контроля линейных и угловых перемещений, расстояний между деталями, состава физических смесей, температуры, уровня жидкостей, давления, влажности диэлектрических материалов и т. п.
Дата добавления: 2020-11-18; просмотров: 821;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
