Емкостные, индуктивные и магнитные инкрементные преобразователи
В 40-х -50-х г. прошлого века, при линейных измерениях начали применять механические индуктивные головки, пневматические и индуктивные приборы. Это был большой прогресс в технике измерений, но одновременно стали понятны ограничители их возможностей: небольшой диапазон измерений, нелинейность характеристик.
Именно нелинейность характеристики затрудняло увеличение диапазона измерений и увеличивало погрешность измерений. Поэтому эти приборы были пригодны для сравнительных относительных измерений, с настройкой по образцу или концевой мере длины. Но машиностроение быстро развивалось и были необходимы приборы для абсолютных измерений в большом диапазоне. Стало очевидно, дальнейшее развитие техники линейных и угловых измерений требует разработки приборов на других физических принципах, когда начали разрабатывать и выпускать инкрементные преобразователи (ИП), которые измеряют небольшие приращения измеряемой координаты, при перемещении измерителя и суммируют их, получая величину перемещения. Преимущество таких преобразователей: принципиальное отсутствие нелинейности характеристики и неограниченные диапазоны измерений. ИП начали выпускать и разрабатывать давно, но их качество и точность ограничивало отсутствие необходимых технологий и материалов и недостаточно развитая электроника.
Разработки современных ИП способствовали развитию координатных измерений (например КИМ) и появление станков с ЧПУ, так же развитие электроники, вычислительной техники и появление новых технологий.
Сейчас все технологические и конструктивные препятствия преодолены и ИП выпускают построенных на разных принципах действия. Причем современные ИП имеют высокую точность и большие диапазоны измерений.
В настоящее время выпускают и широко применяют в измерительной технике и на станках с ЧПУ, несколько типов ИП: оптоэлектронные, емкостные, индуктивные и магнитные.
Сравнительные данные
| Технология | Преимущество | Недостатки |
| Оптоэлектронные | Точность менее 1 мкм | Большая потребляющая мощность |
| Магнитные | Напечатанная шкала | Недостаточная линейность |
| Емкостные | Линейность 0,2% от шага Т | Чувствительность к влажности |
| Индуктивные | Линейность 0,2% от шага Т | Влияние емкости |
Для точных измерений на координатно измерительных машинах (КИМ), в микроскопах, проекторах применяют оптоэлектронные инкрементные преобразователи для ручного электронного инструмента (штангенциркули, микрометры, индикаторы), применяют емкостные и индуктивные преобразователи.
Емкостные ИП впервые были выпущены фирмой Sylvac в 1983г. Тогда же фирма выпустила первый электронный штангенциркуль на базе емкостного ИП. Однако емкостные преобразователи чувствительны к влажности окружающего воздуха. При увеличении влажности у емкостных преобразователей, увеличивается нелинейность показаний. Поэтому в 2003г. фирма Sylvac выпустила индуктивный ИП. Емкостные и индуктивные ИП, выгодно отличаются небольшой мощностью, потребляемой для считывания информации со шкалы, поэтому емкостные и индуктивные ИП, наиболее удобны для применения в измерительных системах с жесткими ограничителями на потребляемую мощность рис.41
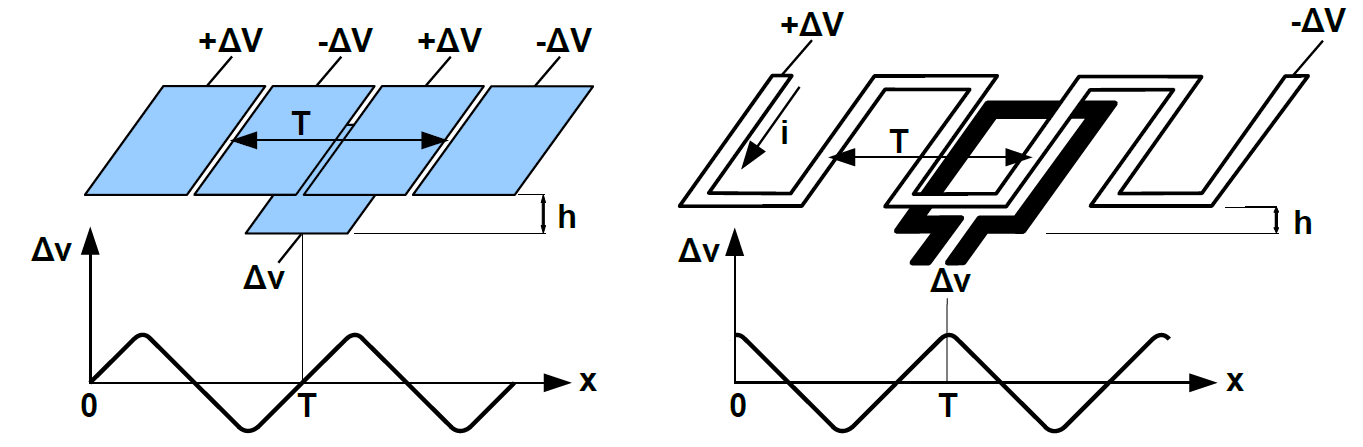
Рис. 41. Упрощенные схемы емкостного и индуктивного ИП
Их широко использую в ручном измерительном инструменте, с цифровым отсчетом с батарейным питанием. Работу емкостного ИП рассмотрим на примере преобразователя рис.42
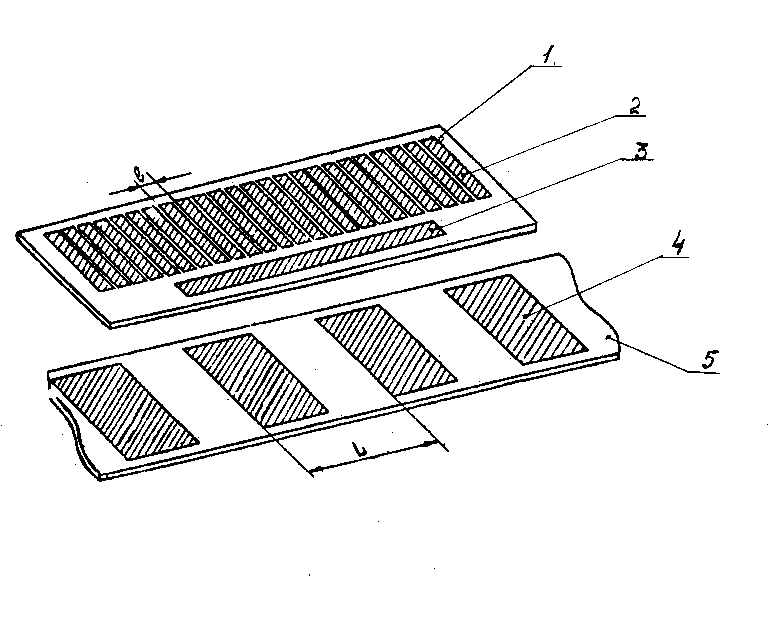
Рис. 42. Схема емкостного ИП
Хотя на практике применяют и другие конфигурации шкал работающих на том же принципе ИП состоит из гибкой линейки и съемника, выполненных из фольгированного диэлектрического материала. Линейка представляет собой многослойную гибкую ленту, с нанесенным на ней фольгированным слоем. На изнаночной стороне нанесен клей и линейка приклеивается по всей стороне штанги штангенциркуля. На съемнике, ползуна штангенциркуля, расположена небольшая считывающая шкала, с электродами, нанесенными на фольгированном слое.
Преобразователь состоит из двух плоских шкал. На одной шкале 1 (линейки) нанесены одинаково прямоугольные электроды 2, с постоянным шагом l (эль). На эти электроды от специального генератора подается периодическое напряжение имеющее одинаковую форму и амплитуду, но сдвинутые по фазе. Указанные электроды являются передающими. Расположенный на той же шкале электрод 3 является приемным. На другой шкале 5, со специальным шагом L, нанесены электроды связи 4, некоторые из которых перекрывают передающие и приемные электроды и осуществляют емкостную связь, части передающих электродов с приемным. Отношение между шагом передающих электродов и шагом электродов связи составляет величину m:
m=L/l
где m- целое число и означает число передающих электродов размещенных на интервале равному шагу L.
Нормальная работа емкостного ИП, обеспечивается m фазной системой электродов, для создания периодической пространственной волны.
Все напряжения периодические имеют идентичную форму, одинаковую амплитуду и обеспечивает заданный сдвиг фаз. Периодические напряжения передающих электродов создают волну распространяющихся между двумя пластинами. Часть этой волны попадает на приемный электрод и образует выходной сигнал преобразователя, который передается на фазо-чувствительное устройство определяющее момент времени t, когда фаза выходного сигнала достигает значения φ0, если подвижная шкала смещена относительно неподвижной на величину х1.
При смещении подвижной шкалы на величину х2, та же фаза φ0 достигается в момент времени t2. Измеряя сдвиг фазы выходного сигнала, можно получить величину перемещения подвижной пластины преобразователя, относительно неподвижной. Причем однозначность связи фазы с перемещением до определенных значений, не зависит от скорости и ускорения движения подвижной шкалы относительно неподвижной.
На съемнике ИП, расположена электронная микросхема и цифровой дисплей. На корпусе съемника имеются кнопки вкл/откл, установка нуля и др. Емкостные ИП имеют простую конструкцию и высокую надежность в эксплуатации. На них практически не влияет окружающая среда, кроме влажности. Однако емкостные ИП не обладают высокой точностью как оптоэлектронные ИП. Это объясняется тем, что носители информации, т.е. шкалы преобразователей, выполнены из пластика и технология и шаг нанесенных на них электродов не может быть выполнен таким малым как на стеклянных шкалах оптоэлектронных ИП.
Дискретность цифрового отсчета у действующих приборов с емкостными ИП равна 0,01; 0,001; 0,0001 мкм. Повторяемость линейных емкостных ИП равна 2-4 мкм. Погрешность зависит от того измеряемого средства которыми используются ИП от диапазона измерений. Погрешность не менее 5-10 мкм.
Емкостные ИП чрезвычайно конструктивны и технологичны. Неподвижная длинная шкала выполняется на пластине или ленте из фольгированного текстолита шириной 15-20 мм и толщиной 1 мм. Шкала наклеивается на основание прибора, например, на штангу штангенциркуля. Подвижная шкала выполнена в одном блоке с микросхемой и цифровым дисплеем. Весь подвижный блок занимает очень мало места, что позволяет широко использовать емкостные ИП в ручных и автоматических измерительных приборах. В настоящее время большинство фирм, выпускающих ручные электронные приборы, снабжают их емкостными ИП и встроенным цифровым отсчетом.
Индуктивные ИП
Емкостные ИП, как все емкостные преобразователи очень чувствительны к изменению влажностиокружающей среды, что сильно влияет на линейность преобразователя. Поэтому фирма Sylvak в 2003 году выпустила индуктивный ИП и стала устанавливать их на электронные штангенциркули, индикаторы и другие приборы.
Индуктивный ИП, в отличие от емкостного, работает в магнитном поле и поэтому не чувствителен к влажности и другим загрязнениям шкалы.
Индуктивный ИП состоит из шкалы (линейки) и считывающего устройства, которое перемещается над шкалой с небольшим зазором h. Шкала, похожая на лестницу, состоит из серии замкнутых петель, расположенных с шагом Т, токи которых направлены встречно. На считывающем устройстве на двух сторонах платы нанесена последовательность из трех чередующихся плоских зигзагообразных основных обмоток и трех чередующихся зигзагообразных съемных обмоток с шагом H. Две плоские зигзагообразные обмотки взаимодействуют через подвижную петлю (рис. 43).

Рис. 43. Принцип действия индуктивного ИП
Напряжение V через первую обмотку индуцирует ток i в петле, который непосредственно индуцирует напряжение v во второй обмотке. Если петля сдвигается на один шаг Т, индуцированный ток реверсируется (поворачивается по часовой стрелке), но напряжение обмотки v имеет ту же полярность снова (два реверса): связь (v /V) становится зависимой от х с периодом T. Шкала состоит из серии замкнутых петель с шагом Т, токи которых направлены встречно. Токи, создаваемые в первой зигзагообразной обмотке, усиливают друг друга в соседних петлях, а также напряжения во второй зигзагообразной обмотке. Основой измерения является шкала, более длинная, чем обмотки. Внешние электромагнитные поля, не вызывают замкнутых токов в петле, поэтому на напряжение, индуцированное на второй обмотке, они не оказывают воздействия. Две обмотки сдвинуты на T/4 шага шкалы. Если шкала смещается влево или вправо, разность фаз с опорным сигналом также смещается со скоростью периода, и отслеживается перемещение любой длины.
У индуктивных ИП значительно меньше шаг электродов, чем у емкостных, от 1 до 2 мм, что облегчает изготовление обмоток и позволяет увеличить зазор h. Обычно h составляет от 0,1 до 0,2 шага T.
Выходной сигнал индуктивных ИП после низкочастотной фильтрации представляет собой синусоиду с фиксированной амплитудой, фазовый сдвиг которой линейно зависит от перемещения шкалы.
В микросхеме, установленной в считывающем устройстве выходной сигнал интерполируется и преобразуется в цифровые показания, отображаемые на дисплее.
Дискретность цифровой индикации приборов с индуктивными ИП составляет 0,01; 0,001; 0,0001 мм.
Емкостные и индуктивные ИП выпускает фирма Sylvac (Швейцария), Mitutoyo (Япония), Tesa (Швейцария) и др.
Магнитные ИП
Магнитные ИП редко применяются при линейны и угловых измерениях из-за низкой точности по сравнению с емкостными, индуктивными и, тем более, оптоэлектронными ИП. Их основная область применения станки с ЧПУ, технологическое оборудование, электроприводы и др.
Магнитный ИП состоит из гибкой магнитной линейки (ленты), жестко устанавливаемой, например, на станину КИМ или станка и подвижной считывающей головки, которая крепится к подвижному узлу машины или станка.
Магнитная линейка представляет собой многослойную ленту, состоящую из подложки с нанесенным на нее магнитным слоем и защитного покрытия. С изнаночной стороны на магнитную линейку наносится адгезивный (клеящий) слой, защищенный воздухонепроницаемой пленкой. На магнитном слое нанесены намагниченные штрихи (полюса) и слабо намагниченные интервалы между ними. Расстояние между полюсами магнитов напрямую влияет на скорость считывания данных считывающей головкой и определяет быстродействие системы и ее номинальные рабочие скорости. В считывающей головке расположены обычно несколько датчиков Холла, выходной сигнал которых определяет расстояние, пройденное от опорной точки (метки).
Разрешающая способность магнитных ИП составляет от 1,0 до 25 мкм.
Повторяемость ±2,0 мкм.
Погрешность измерения составляет ±5-10 мкм.
Дата добавления: 2021-01-26; просмотров: 944;
Поиск по сайту
Узнать еще
- Cпециализированные преобразователи
- DC-AC преобразователи. Двухактный инвертор.
- IV. ФЕРРОМАГНИТНЫЕ МАТЕРИАЛЫерромагнитные материалы
- Абсолютные и дифференциальные вихретоковые преобразователи
- Активные и индуктивные сопротивления проводов
- АКТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ СОПРОТИВЛЕНИЯ
- Аморфные магнитные материалы
- Аналого цифровые преобразователи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
