Индуктивные преобразователи
Индуктивные преобразователи представляют собой катушку индуктивности (дроссель), полное сопротивление которой меняется при взаимном относительном перемещении элементов магнитопровода.
Различают индуктивные преобразователи:
- с изменяющейся индуктивностью;
- с изменяющимся активным сопротивлением.
Индуктивный преобразователь с изменяющейся индуктивностью показан на рисунке 3.20
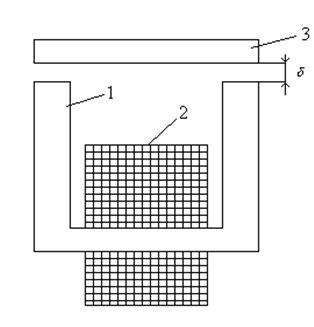
Рисунок 3.20 - Индуктивный преобразователь с изменяющейся индуктивностью
(1 - П-образный магнитопровод; 2- катушка; 3- подвижной якорь)
При перемещении якоря изменяется длина воздушного зазора d, что вызывает изменение магнитного сопротивления и индуктивности дросселя.
Другой вид индуктивного преобразователя с изменяющейся индуктивностью плунжерный преобразователь, показанный на рисунке 3.21
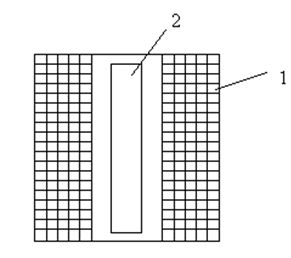
Рисунок 3.21 - Плунжерный преобразователь
(1 - катушка; 2 – плунжер)
При среднем положении плунжера индуктивность максимальна.
Схема преобразователя с изменяющимся активным сопротивлением показана на рисунке 3.22
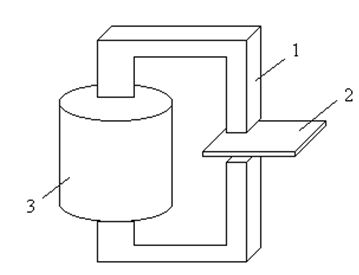
Рисунок 3.22 - Схема преобразователя с изменяющимся активным сопротивлением
(1 - магнитная цепь; 2 - пластина с высокой электропроводностью; 3 – катушка)
При изменении положения пластины (ввод в зазор магнитопровода), в ней наводятся вихревые токи, приводящие к увеличению активной мощности катушки, что эквивалентно увеличению активного сопротивления.
3.5.1 Основные формулы преобразователя
Индуктивность преобразователя:

| (3.30) |
где W - число витков;
I - ток протекающий по катушке;
Ф – магнитный поток.

| (3.31) |
где H - напряженность магнитного поля, А/м2;
L – длина магнитопровода.
Индуктивность преобразователя с учетом последней формулы выглядит так:

| (3.32) |
где  - магнитное сопротивление преобразователя.
- магнитное сопротивление преобразователя.
Пренебрегая рассеиванием магнитного потока, магнитное сопротивление будет равно:
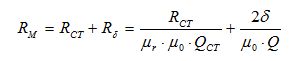
| (3.33) |
где Rст - магнитное сопротивление стали магнитопровода;
R3 - магнитное сопротивление зазора;
lст - длина средней линии по стальным участкам;
Qст - поперечное сечение;
μr - магнитная проницаемость стали;
μ0=4π10-7 Гн/м - магнитная постоянная;
δ - длина зазора;
Q - сечение зазора.
Если сечение стали и зазора равны Qст=Q, то индуктивность преобразователя равна:
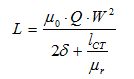
| (3.34) |
Пренебрегая активным сопротивлением катушки, зависимость полного сопротивления от воздушного зазора определяется выражением:
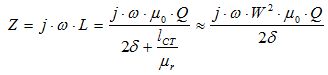
| (3.35) |
причем: 
График зависимости показан на рисунке 3.23
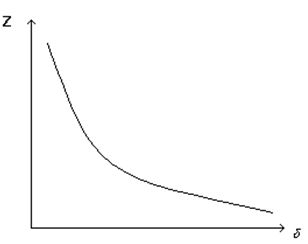
Рисунок 3.23 - График зависимости δ от Z
Чувствительность индуктивного преобразователя определяется соотношением:
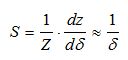
| (3.36) |
Недостатки:
1.функция преобразования нелинейна;
2.влияние температуры вызывает изменение активного сопротивления обмотки, вызывая большие погрешности;
3.значительная сила притяжения якоря.
Дифференциальные индуктивные преобразователи лишены этих недостатков. Они состоят из двух одинарных преобразователей, имеющих один общий подвижный элемент. На рисунке 3.24 показаны структурные схемы дифференциальных индуктивных преобразователей
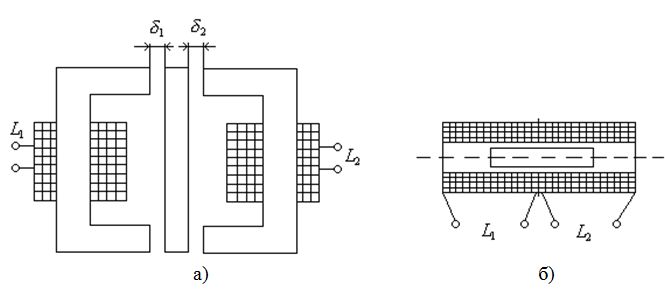
Рисунок 3.24 - Структурные схемы дифференциальных индуктивных преобразователей
Схемы включения дифференциальных индуктивных преобразователей показаны на рисунке 3.25. Они основаны на мостовых схемах
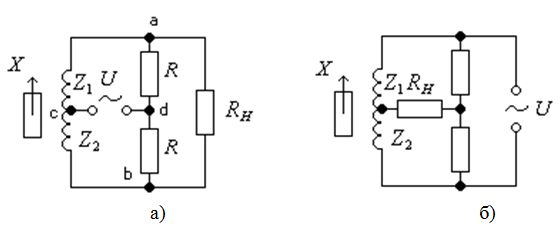
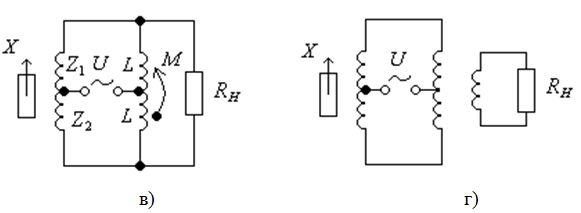
Рисунок 3.25 – Мостовые схемы индуктивных преобразователей
Мосты проектируют так, чтобы на измерительной диагонали отсутствовало напряжение при среднем положении якоря. При небольших изменениях якоря, изменение сопротивлений, активностей линейно зависят от перемещения. Если перемещение значительно, то в виду нелинейности преобразования они не равны, поэтому не применяются на практике.
При среднем положении якоря сопротивления плеч равны между собой:
| Z1=Z2=Z0 | (3.37) |
При перемещении якоря сопротивление плеч меняется:
| (3.38) (3.39) |
Чувствительность схемы определяется выражением:
| (3.40) |
Для схемы 3.25 а) выходное напряжение равно:
| (3.41) |
Тогда чувствительность в режиме холостого хода будет равна:
| (3.42) |
Для схемы 3.25 б) чувствительность определяется выражением:

| (3.43) |
и не зависит от параметров схемы.
3.5.2 Погрешности индуктивных преобразователей
1. Температурная погрешность, которая уменьшается применением мостовых схем.
2. Высокие требования к питающему напряжению, поэтому применяют стабилизаторы или компенсационные схемы измерения.
3. Влияние изменения частоты питающего напряжения, поэтому необходимо принимать меры по стабилизации частоты.
4. Сложность балансировки схемы.
5. Наличие в питающем напряжении основной частоты других составляющих с краткими частотами приводит к небалансировке мостов.
Для уменьшения погрешностей небалансировки мостов применяется фазочувствительный выпрямитель.
Дата добавления: 2021-04-21; просмотров: 689;
Поиск по сайту
Узнать еще
- Cпециализированные преобразователи
- DC-AC преобразователи. Двухактный инвертор.
- Абсолютные и дифференциальные вихретоковые преобразователи
- Активные и индуктивные сопротивления проводов
- АКТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ СОПРОТИВЛЕНИЯ
- Аналого цифровые преобразователи
- Аналого-цифровые и цифро-аналоговые преобразователи
- Аналого-цифровые и цифро-аналоговые преобразователи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
