Несимметричные автоколебания. Постоянные ошибки
Обратимся к нелинейной системе с внешним воздействием f(t) (рис. 4.27).
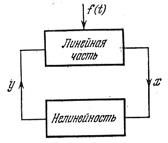
Рис.4.27. Нелинейная система
с внешним воздействием f(t)
Уравнение динамики замкнутой системы будет иметь вид
 , (4.57)
, (4.57)
где операторный многочлен S(p) зависит от места приложения внешнего воздействия.
Положим правую часть уравнения (4.57) постоянной:
 (4.58)
(4.58)
Это может быть в двух случаях:
1) внешнее воздействие f(t) постоянно:  , тогда
, тогда  ;
;
2) внешнее воздействие f(t) есть линейная функция с постоянной составляющей:  , при условии
, при условии  , тогда
, тогда  .
.
Эти случаи соответственно для систем без астатизма и с астатизмом.
Итак, рассмотрим уравнение системы в виде
 (4.59)
(4.59)
В этом случае за счет постоянной правой части уравнения появится постоянная составляющая в периодическом решении (несимметричные автоколебания). Поэтому решение ищется в виде (4.15) и (4.16).
Величина  характеризует постоянную статическую или скоростную ошибку системы.
характеризует постоянную статическую или скоростную ошибку системы.
Однако несимметричные колебания могут иметь место и при отсутствии внешнего воздействия, т. е. в системе
 (4.60)
(4.60)
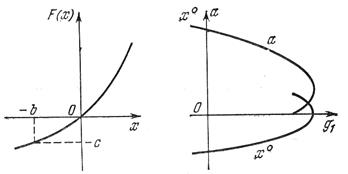
если F(x) — несимметричная нелинейность. Это проиллюстрировано на рис. 4.28, где постоянная составляющая F0 на выходе нелинейности возникает даже при симметричном входе  . Затем постоянная составляющая, вообще говоря, пройдет и на вход х через линейную часть системы и приведет к решению вида (4.15) и (4.16). Следовательно, статическая ошибка в нелинейной системе может иметь место и без внешнего воздействия — за счет несимметрии нелинейности.
. Затем постоянная составляющая, вообще говоря, пройдет и на вход х через линейную часть системы и приведет к решению вида (4.15) и (4.16). Следовательно, статическая ошибка в нелинейной системе может иметь место и без внешнего воздействия — за счет несимметрии нелинейности.
Гармоническая линеаризация в случае несимметричных колебаний имеет вид (4.16), т. е.
 (4.61)
(4.61)
где х0 — постоянная составляющая (4.17), q и q' — коэффициенты гармонической линеаризации (4.18). Их вычисление показано в примерах 4.6—4.10 раздела 4.2.
Подставим искомое решение (4.15) и (4.16) в результат
гармонической линеаризации нелинейности (4.61) в заданное уравнение системы (4.59):

Выделим отсюда уравнение для постоянных составляющих:
 (4.62)
(4.62)
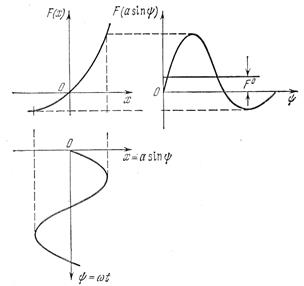
Рис.4.28. Возникновение несимметричных
колебаний
и уравнение для периодических составляющих:
 (4.63)
(4.63)
Видно, что постоянная составляющая ( ) и колебательная (α, ω) определяются не в отдельности, а только путем совместного решения этих уравнений.
Сначала из алгебраического уравнений (4.15) и (4.16) можно определить зависимость
 (4.64)
(4.64)
Затем подставить эту зависимость в выражения  и
и  , имеющиеся для заданной нелинейности. Тогда получатся новые выражения и графики для q(α) и q'(α), включающие зависимость (4.64). В результате уравнение (4.63) приводится к виду (4.38). Методика решения задачи по определению α и ω остается прежней (раздел 4.3 или раздел 4.4), но с новыми выражениями и графиками для q(α) и q'(α).
, имеющиеся для заданной нелинейности. Тогда получатся новые выражения и графики для q(α) и q'(α), включающие зависимость (4.64). В результате уравнение (4.63) приводится к виду (4.38). Методика решения задачи по определению α и ω остается прежней (раздел 4.3 или раздел 4.4), но с новыми выражениями и графиками для q(α) и q'(α).
Определение функции (4.64) упрощается в двух случаях, а именно: 
а) при несимметричной нелинейности и без внешнего воздействия вместо (4.62) имеем
 ;
;
б) при наличии нулевого полюса в передаточной
функции линейной части, когда  , вместо (4.62) в общем случае получим
, вместо (4.62) в общем случае получим
 ,
,
а без внешнего воздействия, при несимметричной нелинейности
Например, при несимметричной нелинейности вида рис. 4.12, а в системе со свойством , согласно примеру 4.10 раздела 4.2 получим
Этим определяется зависимость между величиной смещения и амплитудой α, после чего используется уравнение (4.63).
Определение из уравнения (4.63) периодической составляющей х*, т. е. величин α и ω, упрощается в случае однозначной нечетно-симметричной нелинейности  . В этом случае, согласно (4.63), характеристическое уравнение получает вид
. В этом случае, согласно (4.63), характеристическое уравнение получает вид
 (4.64)
(4.64)
а после подстановки  аналогично (4.41) придем к уравнениям
аналогично (4.41) придем к уравнениям

Сравнив эти уравнения с (4.41), получаем
 , (4.65)
, (4.65)
где  относится к симметричным автоколебаниям в той же системе, определяемым согласно раздела 4.3. Сделав подстановку (4.64), будем иметь уравнение
относится к симметричным автоколебаниям в той же системе, определяемым согласно раздела 4.3. Сделав подстановку (4.64), будем иметь уравнение
 , (4.66)
, (4.66)
где  —новое выражение или график, учитывающий зависимость (4.64).
—новое выражение или график, учитывающий зависимость (4.64).
Таким образом, при однозначной нелинейности частота ω несимметричных автоколебаний остается такой же, как и при симметричных, независимо от величины смещения . Амплитуда же несимметричных колебаний α, определяемая уравнением (4.65), зависит от смещения и выражается через амплитуду симметричных автоколебаний αс. Здесь не требуется решать уравнение (4.63).
Пример.4.14. В следящей системе (рис. 4.29) заданы в виде рис. 1.13 и передаточные функции:

Рис.4.29. Следящая система с идеальной релейной
характеристикой
Гармоническая линеаризация нелинейности (раздел 4.2) при симметричных колебаниях дает

а при несимметричных —
 (4.67)
(4.67)
где, согласно (4.32),

 (4.68)
(4.68)
Уравнение замкнутой системы относительно переменной х (рис. 4.29) имеет вид
 (4.69)
(4.69)
При симметричных автоколебаниях (  ) имеем характеристическое уравнение
) имеем характеристическое уравнение

Подставив , получим



Откуда


 (4.70)
(4.70)
Рассмотрим несимметричные автоколебания при задающем воздействии  . В соответствии с (4.62), (4.68) и (4.69) получаем уравнение для постоянных составляющих
. В соответствии с (4.62), (4.68) и (4.69) получаем уравнение для постоянных составляющих
откуда находим
 (4.71)
(4.71)
Подстановка (4.71) в выражение для q (4.68) дает
Теперь для определения амплитуды α несимметричных автоколебаний используем уравнение (4.66), а именно
Откуда
 , (4.72)
, (4.72)
где αс определяется соотношением (4.71). Тогда, согласно (4.71), постоянная составляющая (смещение) определяется в виде
 (4.73)
(4.73)
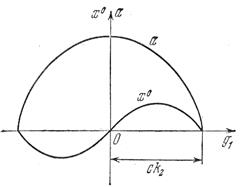
Рис.4.30. Зависимости
α и от g1
Частота же ω несимметричных автоколебаний будет прежней (формула 4.70).
Результаты (4.72) и (4.73) представлены графически на рис. 4.30.
Пример 4.15. Исследуем ту же систему (рис. 4.29), но с несимметричной нелинейностью вида рис. 4.31,а при задающем воздействии . Уравнение системы:

Причем  вычисляется по формуле (4.67), где аналогично примеру 4.10 раздела 4.2 имеем
вычисляется по формуле (4.67), где аналогично примеру 4.10 раздела 4.2 имеем
 (4.74)
(4.74)
 (4.75)
(4.75)
а) б)
Рис.4.31. Зависимости α и от g1 для
несимметричной нелинейности
Уравнение для постоянных составляющих (4.62), с учетом того, что здесь  , запишется в виде
, запишется в виде
откуда согласно(4.74) имеем
 (4.76)
(4.76)
Характеристическое уравнение для периодических составляющих в соответствии с (4.62) запишется в виде

 После подстановки
После подстановки  получаем
получаем


Откуда
Последнее уравнение с подстановкой (4.75) и (4.76) приобретает вид
Отсюда определяется величина смещения , после чего вычисляется амплитуда α по формуле (4.76). Результаты представлены на рис. 4.31, б.
4.6. Контрольные вопросы к главе 4
1. Что составляет основу метода гармонической линеаризации?
2. Какой тип ряда используется для разложения сигнала нелинейного звена?
3. Каким свойством должна обладать линейная часть системы?
4. Что обуславливает неприменимость принципа суперпозиции в нелинейных системах?
5. Какими должны быть знаки параметров ξ и α для устойчивости периодического решения?
6. Что является критерием устойчивости периодического решения?
7. Каким способом определяется устойчивости периодического решения?
8. При каком типе корней характеристического уравнения получается периодическое решение?
9. Как определяется зависимость между величиной смещения и амплитудой?
10. Зависит ли частота несимметричных автоколебаний, при однозначной нелинейности, от величины смещения?
Дата добавления: 2020-10-25; просмотров: 1042;
Поиск по сайту
Узнать еще
- А) Постоянные магниты
- Акцентологические ошибки
- Аргументация и спор (анализ аргументации и способы убеждения, правили и ошибки в аргументации).
- Битовая вероятность ошибки при передаче цифрового сигнала
- Вероятность ошибки диагностирования
- Вероятность ошибки диагностирования
- Временные и постоянные конституции
- Второй учебный вопрос: Постоянные парки. Его основные элементы, их назначение, общее устройство и основное оборудование.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
