Метод точечного преобразования
Изложенный выше метод припасовывания связан со сложностями увязывания начальных условий каждого участка с получаемыми данными в конце предыдущего участка. Метод точечного преобразования представляет собой усовершенствование метода припасовывания с привлечением геометрических представлений в фазовом пространстве.
Запишем в общем виде уравнения динамики нелинейной системы второго порядка без внешнего воздействия:


 (3.14)
(3.14)
На фазовой плоскости (х, у) возьмем какой-нибудь отрезок линии АВ, который пересекается фазовыми траекториями в одном направлении (рис. 3.4). Обозначим через s координату произвольной точки  на отрезке АВ, отсчитываемую вдоль дуги АВ от начала А.
на отрезке АВ, отсчитываемую вдоль дуги АВ от начала А.
Пусть решение уравнений (3.14)  ,
,  дает фазовую траекторию, проходящую через точку . Допустим далее, что с увеличением времени t эта фазовая траектория снова пересечет отрезок АВ в некоторой другой точке
дает фазовую траекторию, проходящую через точку . Допустим далее, что с увеличением времени t эта фазовая траектория снова пересечет отрезок АВ в некоторой другой точке  (рис. 3.4). Координату точки по дуге АВ обозначим
(рис. 3.4). Координату точки по дуге АВ обозначим  .
.
Точка (первого следующего пересечения отрезка АВ той же фазовой траекторией) называется последующей по отношению к исходной точке . Зависимость
 (3.15)
(3.15)
соответствующая ходу фазовой траектории в силу решения уравнений (3.14), называется функцией последования. Функция последования определяет закон точечного преобразования для данной нелинейной системы.
Определение последующих точек по заданным исходным на отрезке АВ и называется точечным преобразованием отрезка АВ самого в себя. Ввиду непрерывности расположения фазовых траекторий исходные и последующие точки заполняют весь отрезок. Однако каждая точка отрезка АВ не обязательно имеет последующую внутри этого отрезка. Фазовые траектории, пересекающие отрезок, могут и не возвращаться к нему.
Возможен такой случай, что последующая точка совпадает с исходной , т. е.
 (3.16)
(3.16)
При этом мы получаем замкнутую фазовую траекторию (рис. 3.4): предельный цикл или кривую, соответствующую особой точке типа «центр», и т. п.
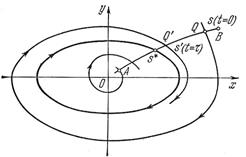
Рис.3.4. Замкнутая фазовая
траектория
Последнее выясняется из хода соседних фазовых траекторий. Случай (3.16) называется точечным преобразованием точки самой в себя. Это неподвижная точка в общем точечном преобразовании отрезка АВ.
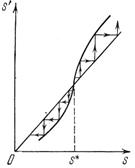
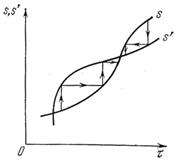
Изобразим графически функцию последования  (рис. 3.5). Проведем из начала координат наклонную прямую под углом 45° (биссектрису координатного угла). Если она пересечется с кривой
(рис. 3.5). Проведем из начала координат наклонную прямую под углом 45° (биссектрису координатного угла). Если она пересечется с кривой  , то эта точка пересечения даст координату s* (рис. 3.5) замкнутой фазовой траектории.
, то эта точка пересечения даст координату s* (рис. 3.5) замкнутой фазовой траектории.
Ход точечного преобразования прослеживается на этом графике следующим образом. Возьмем исходную точку s правее точки s* (рис. 3.5). Точке s соответствует определенное значение s' (точка N) на кривой . Таким образом, мы нашли координату последующей точки.
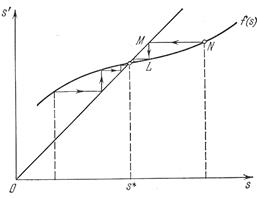
Рис.3.5. Ход точечного
преобразования
Теперь примем ее за новую исходную точку. Для этого достаточно снести полученную точку N по горизонтали NM (рис. 3.5) на биссектрису. Проведя далее из точки М вертикаль ML, найдем значение координаты  новой последующей точки и т. д. Из этого простого построения видно, что в данном случае процесс сходится к предельному циклу
новой последующей точки и т. д. Из этого простого построения видно, что в данном случае процесс сходится к предельному циклу  .
.
Возьмем теперь исходную точку s левее и точно тем же способом проследим ход точечного преобразования, как показано стрелками на рис. 3.5. Очевидно, этот процесс тоже сходится к тому же предельному циклу . Следовательно, здесь мы имеем устойчивый предельный цикл (автоколебания).
Отсюда условие устойчивости предельного цикла имеет вид
 (3.17)
(3.17)
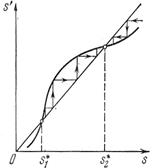
В противном случае, изображенном на рис. 3.6, а (где стрелками показан ход точечного преобразования), получается неустойчивый предельный цикл. На других графиках рис. 3.6 показаны: 1) случай двух предельных циклов, из которых один неустойчивый (а), а второй устойчивый (б);
а) б)

в) г)
Рис.3.6. Предельные циклы и
виды колебаний
2) случай расходящихся колебаний(в); случай затухающих колебаний(г).
Такого типа графики (рис. 3.5, 3.6) называются диаграммами точечного преобразования. Изображение хода точечного преобразования на такой диаграмме эквивалентно сопряжению начальных и концевых условий соседних участков в методе припасовывания. Но производится это специальным и довольно простым геометрическим построением. Это будет видно нагляднее на примерах раздела 3.3.
Основным в методе является нахождение функции последования  на основе решения уравнений динамики системы (3.14). Найти эту функцию в явной форме не всегда легко. В большинстве случаев бывает легче представить функцию последования в параметрической форме.
на основе решения уравнений динамики системы (3.14). Найти эту функцию в явной форме не всегда легко. В большинстве случаев бывает легче представить функцию последования в параметрической форме.
Параметрическая форма точечного преобразования в качестве параметра содержит время τ прохождения изображающей точки по фазовой траектории от исходной точки (рис. 3.4) до ее последующей . Через этот параметр τ на основании решения уравнений (3.14) выражаются координаты точек и , а именно

 (3.18)
(3.18)
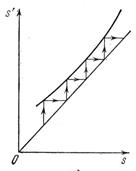
Графики этих функций показаны на (рис. 3.7).
Рис. 3.7. Устойчивой
предельный цикл
Точка пересечения их дает координату  замкнутой фазовой траектории (предельного цикла), причем абсцисса этой точки определяет период Т соответствующих колебаний системы. Условие устойчивости предельного цикла сохраняется в виде (3.17), но с дифференцированием и s по параметру τ в (3.18). Изображенный на рис. 3.8 случай соответствует устойчивому предельному циклу.
замкнутой фазовой траектории (предельного цикла), причем абсцисса этой точки определяет период Т соответствующих колебаний системы. Условие устойчивости предельного цикла сохраняется в виде (3.17), но с дифференцированием и s по параметру τ в (3.18). Изображенный на рис. 3.8 случай соответствует устойчивому предельному циклу.
Ход точечного преобразования на такой параметрической диаграмме прослеживается следующим образом. Берем некоторую исходную точку на кривой s (рис. 3.7). Перемещаемся по вертикали до кривой , находя тем самым последующую точку при том же значении параметра  (это будет время движения изображающей точки по фазовой траектории от до на рис. 3.5). Затем найденную последующую точку принимаем за новую исходную, для чего по горизонтали (рис. 3.7) переносим ее на кривую s. После этого переходим снова на кривую уже при новом значении
(это будет время движения изображающей точки по фазовой траектории от до на рис. 3.5). Затем найденную последующую точку принимаем за новую исходную, для чего по горизонтали (рис. 3.7) переносим ее на кривую s. После этого переходим снова на кривую уже при новом значении  и т. д. Весь ход точечного преобразования показан на рис. 3.7 стрелками.
и т. д. Весь ход точечного преобразования показан на рис. 3.7 стрелками.

а) б)


в) г)
Рис. 3.8. Параметрические диаграммы
точечного преобразования
Рис. 3.8 иллюстрирует параметрические диаграммы точечного преобразования для тех же четырех случаев, что и на рис. 3.6.
Пример 3.1. Рассмотрим ту же систему, что и при разборе метода припасовывания (раздел 3.1).
 Уравнения объекта и регулятора имеют вид
Уравнения объекта и регулятора имеют вид


где  — гистерезисная релейная характеристика (рис. 1.10). Эту систему уравнений перепишем в виде
— гистерезисная релейная характеристика (рис. 1.10). Эту систему уравнений перепишем в виде

 (3.19)
(3.19)
На фазовой плоскости (х,у) нанесем линии переключения, соответствующие заданной нелинейной характеристике (рис. 1.10):  при
при  ,
,  при
при  . Это будут полупрямые П0 и П1 (рис. 3.9).
. Это будут полупрямые П0 и П1 (рис. 3.9).
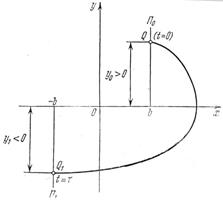
Рис.3.9. Полупрямые П0 и П1 
Ввиду нечетной симметрии характеристики можно рассматривать только участок фазовой траектории идущий от полупрямой П0 до П1, так как закон возвращения этой траектории к линии П0 будет аналогичен. Таким образом, будем рассматривать точечное преобразование полупрямой П0 в полупрямую П1 (а не саму П0 в себя, как ранее). При этом исходная точка имеет последующую  .
.
Пусть в точке будет  , а в точке обозначим
, а в точке обозначим  . На участке фазовой траектории имеем
. На участке фазовой траектории имеем  . Поэтому уравнения (3.19) принимают вид
. Поэтому уравнения (3.19) принимают вид
Интегрирование их дает
 (3.20)
(3.20)
 (3.21)
(3.21)
Используем здесь параметрический способ точечного преобразования. Обозначим ординаты точек и через  и
и  соответственно. Закон точечного преобразования будем искать в виде функций
соответственно. Закон точечного преобразования будем искать в виде функций  ,
,  . При начальных условиях (точка ): при ,
. При начальных условиях (точка ): при ,  ,
,  определяются произвольные постоянные в (3.20) и (3.21):
определяются произвольные постоянные в (3.20) и (3.21):


В точке имеем  ,
,  ,
,  . Подставляя эти величины в уравнение (3.20), получаем
. Подставляя эти величины в уравнение (3.20), получаем
 (3.22)
(3.22)
а подстановка в уравнение (3.21) дает

Из последнего уравнения непосредственно находим
 (3.23)
(3.23)
Тогда из (3.22) с учетом (3.23) получим
 (3.24)
(3.24)
Формулы (3.23) и (3.24) и являются искомым законом точечного преобразования в параметрической форме.
Построим диаграмму (рис. 3.10) точечного преобразования в виде кривых и . (Переменная берется по абсолютному значению, так как она отрицательна). Здесь в одном графике отражено все протекание переходного процесса (обозначено стрелками) и периодическое решение — точка пересечения кривых. При этом в переходном процессе найдены последовательные значения ординат и , а также времена τ движения на каждом участке, а в периодическом режиме — амплитуда  и полупериод Т.
и полупериод Т.
На рис. 3.11 показаны точки образующей переходных колебаний, взятые из диаграммы точечных преобразований (рис. 3.10).
Дальше эти точки соединяются экспонентами (рис. 3.12) согласно уравнению (3.20). Таким образом, в виде единого
простого геометрического построения здесь решается вся задача припасовывания решений по участкам для переменной у.
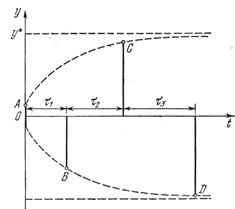
Рис. 3.10. Диаграмма Рис. 3.11. Точки
точечного преобразования образующей
переходных колебаний


Рис.3.12. Соединение Рис. 3.13. Кривая
точек экспонентами переходного процесса
Затем, имея длины участков τ1 τ2, τ3, ... и зная, что на границах участков  , легко по уравнению (3.21) построить также и кривую переходного процесса для переменной х (рис 3.13, где х* — амплитуда автоколебаний).
, легко по уравнению (3.21) построить также и кривую переходного процесса для переменной х (рис 3.13, где х* — амплитуда автоколебаний).
Аналогично получается и затухающий процесс (выше точки , рис. 3.10).
Пример 3.2. Возьмем ту же систему (3.19), но с релейной характеристикой общего вида (рис. 1.11). Здесь на фазовой плоскости получаем четыре линии переключения (рис. 3.14). Ввиду нечетной симметрии характеристики  достаточно рассмотреть участок фазовой траектории
достаточно рассмотреть участок фазовой траектории  , идущий от линии П0 через П1 до линии П2. При этом часть
, идущий от линии П0 через П1 до линии П2. При этом часть  фазовой траектории будет прямолинейная, так как там
фазовой траектории будет прямолинейная, так как там  , и в силу (3.17)
, и в силу (3.17)

 (3.25)
(3.25)
Итак, будем рассматривать точечное преобразование полупрямой П0 в полупрямую П2 при условии, что последующая точка  находится на линии П2. Но существуют фазовые траектории
находится на линии П2. Но существуют фазовые траектории  у которых последующая точка
у которых последующая точка  находится не на линии П2, а на отрезке
находится не на линии П2, а на отрезке  .
.
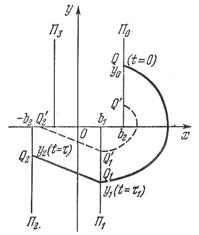
Рис.3.14. Четыре линии
переключения на
фазовой плоскости
Следовательно, надо будет также рассмотреть точечное преобразование части полупрямой П0 и в этот отрезок.
Начнем с первого случая ( ). На участке ,где  , имеем решения уравнений (3.19) в виде
, имеем решения уравнений (3.19) в виде
 (3.26)
(3.26)

В силу начальных условий  ,
,  ,
,  находим
находим

В точке имеем:  ,
,  ,
,  . Поэтому из (3.26) получаем
. Поэтому из (3.26) получаем


откуда находим
 (3.27)
(3.27)
 (3.28)
(3.28)
Используем далее уравнение (3.23) для участка траектории . С учетом начальных условий

 (3.29)
(3.29)

найдем произвольную постоянную
 (3.30)
(3.30)
В точке имеем  ,
,  ,
,  . Поэтому из (3.25) получаем
. Поэтому из (3.25) получаем
 (3.31)
(3.31)
или, согласно (3.30),
 (3.32)
(3.32)
Мы получили параметрические выражения (через параметр τ1) ординат исходной у0 (3.27) и последующей у2 (3.32) точек. Это позволяет построить диаграмму точечного преобразования в параметрической форме (рис. 3.15). Параметр τ1 в данном случае обозначает не все время движения от до , а лишь время движения для траектории ( ).
Рис.3.15. Точечное
преобразование в
параметрической форме
Чтобы определить время для всей траектории , решим первое уравнение (3.19) на участке , где  . Получим
. Получим

Из начальных условий (3.29)
Откуда
Или, согласно (3.31)
 (3.33)
(3.33)
Зная из диаграммы (рис. 3.15) значения y2 и τ1 для каждого шага точечного преобразования, можем по формуле (3.33) подсчитать и время τ для этого шага.
Так определяется переходный процесс, когда точка Q2 находится на линии П2. Предельное (нижнее) положение исходной точки Q0, при котором это справедливо, найдется из диаграммы (рис. 3.14) при  , как показано штриховой линией. Это будет значение у'0. Следовательно, при ординате
, как показано штриховой линией. Это будет значение у'0. Следовательно, при ординате  исходной точки Q выражение (3.32) надо заменить другим. Здесь последующая точка Q'2 (рис. 3.14) определяется абсциссой х2. Поскольку в точке Q'2 имеем
исходной точки Q выражение (3.32) надо заменить другим. Здесь последующая точка Q'2 (рис. 3.14) определяется абсциссой х2. Поскольку в точке Q'2 имеем  , то из (3.25) и (3.30) находим
, то из (3.25) и (3.30) находим
 (3.34)
(3.34)
Следовательно, для каждой точки кривой у0(τ1), лежащей на диаграмме (рис.3.15) ниже точки у0 берем на оси абсцисс значение τ1. Для него по формуле (3.28) вычисляем у1, а затем х2 (3.34). Если при этом окажется  , то процесс заканчивается равновесным состоянием системы внутри зоны нечувствительности релейной характеристики.
, то процесс заканчивается равновесным состоянием системы внутри зоны нечувствительности релейной характеристики.
3.3. Контрольные вопросы к главе 3
1. В чем суть метода припасовывания?
2. Как определяется переходной процесс в методе припасовывания?
3. Как определяются автоколебания в методе припасовывания?
4. Как находится решение трансцендентного уравнения?
5. В чем сложности применения метода припасовывания?
6. В чем суть метода точечного преобразования?
7. Что является основным в методе точечного преобразования?
8. Чем определяется закон точечного преобразования?
9. Как находится функция последования?
Дата добавления: 2020-10-25; просмотров: 1211;
Поиск по сайту
Узнать еще
- I. Гидрометаллургические методы
- I. Определение и структура методов обучения.
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- I. Понятие о методах воспитания.
- I. Темы рефератов, соответствующие актуальным проблемам в содержании основных разделов программы курса «Философия и методология науки»
- II. Методологические основы педагогики.
- II. Методы исследования истории медицины.
- II. Пирометаллургические методы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
