Исходные положения метода гармонической линеаризации
В предыдущих главах исследовались переходные процессы и автоколебания в нелинейных системах второго порядка. Этот материал весьма важен для получения наглядного представления о некоторых особенностях поведения нелинейных систем по сравнению с линейными. Однако большинство реальных систем автоматического управления и регулирования описывается уравнениями более высокого порядка. В связи с этим в данной и в следующих главах будут рассмотрены методы исследования нелинейных систем выше второго порядка.
Наиболее распространенным на практике для этих целей является метод гармонической линеаризации (метод гармонического баланса). Основу этого приближенного метода составляют следующие положения.
Пусть имеется нелинейное звено с характеристикой
любого из видов,
 (4.1)
(4.1)
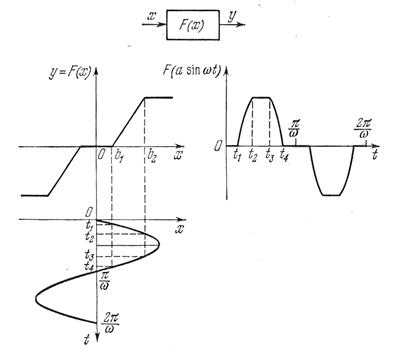
указанных в разделе 1.1 (например, на рис. 1.1 —1.11). Подадим на вход этого звена гармонический сигнал  . На выходе получим
. На выходе получим  . На рис. 4.1 дан пример графического представления функции
. На рис. 4.1 дан пример графического представления функции  (рис. 4.1, б) для заданной нелинейной характеристики F(x) (рис. 4.1, а). Этот периодический выходной сигнал нелинейного звена можно разложить в ряд Фурье
(рис. 4.1, б) для заданной нелинейной характеристики F(x) (рис. 4.1, а). Этот периодический выходной сигнал нелинейного звена можно разложить в ряд Фурье
 (4.2)
(4.2)
где
 (4.3)
(4.3)

 (4.4)
(4.4)
Будем рассматривать нелинейную автоматическую систему с одной нелинейностью  . Тогда, выделив эту нелинейность в отдельное звено, можно всю остальную часть
. Тогда, выделив эту нелинейность в отдельное звено, можно всю остальную часть
а) б)
Рис. 4.1. Графическое представление
функции 
системы, какую бы сложную структуру она ни имела, объединить в единый блок — линейную часть (рис. 4.2). Передаточную функцию линейной части обозначим
 (4.5)
(4.5)
и будем считать, что степень многочлена R(p) в числителе меньше, чем степень многочлена Q(p) в знаменателе. Тогда амплитудная частотная характеристика линейной части  (рис. 4.3) будет стремиться к нулю при
(рис. 4.3) будет стремиться к нулю при  . Начало этой частотной характеристики может иметь два варианта (1, 2, рис. 4.3) в зависимости от того, имеется или нет нулевой полюс в передаточной функции (4.5).
. Начало этой частотной характеристики может иметь два варианта (1, 2, рис. 4.3) в зависимости от того, имеется или нет нулевой полюс в передаточной функции (4.5).
Допустим, что в данной замкнутой системе возможны собственные периодические колебания (автоколебания). Отметим на оси абсцисс (рис. 4.3) частоту первой гармоники этих колебании ω и высшие гармоники 2ω, Зω, ...


Рис. 4.2. Нелинейная Рис. 4.3. АФЧХ
автоматическая линейной
система части
Предположим, что наша система обладает тем свойством, что величина амплитудной характеристики на частотах высших гармоник значительно меньше, чем для первой:
 ,
, 
Это свойство называется свойством фильтра нижних частот линейной части системы. При наличии свойства фильтра линейная часть системы (рис. 4.2) будет хорошо пропускать первую гармонику нелинейных колебаний у и ослаблять все высшие гармоники. Поэтому переменная х на выходе нелинейного звена окажется близкой к синусоиде:
 (4.6)
(4.6)
Это обстоятельство усиливается еще тем фактом, что, как правило, амплитуды высших гармоник (4.4) переменной у хотя и не малы, но все же меньше, чем первой.
При несимметричных колебаниях появится еще постоянная составляющая  :
:
 (4.7)
(4.7)
Итак, базируясь на свойстве фильтра линейной части системы, будем считать, что собственные периодические колебания замкнутой нелинейной системы на входе нелинейного звена х в первом приближении можно полагать синусоидальными (4.6) или (4.7). Выходную же величину у нелинейного звена, содержащую в себе заметные высшие гармоники, надо определять при этом либо графически, как на рис. 4.1, либо аналитически — по формуле (4.2). В итоге вся задача сводится к определению двух неизвестных: частоты ω и амплитуды α первой гармоники колебаний переменной х в случае симметричных колебаний (4.6). В случае же несимметричных колебаний (4.7) речь будет идти о трех неизвестных: α, ω и постоянной составляющей  .
.
Для решения этой задачи необходимо исследовать только прохождение первой гармоники по всей замкнутой цепи, не учитывая пока высших гармоник переменной у, ибо в первом приближении считается, что они не проходят на выход х линейной части системы.
Запишем выражение первой гармоники переменной у согласно (4.2):
 (4.8)
(4.8)
отбросив высшие гармоники не потому, что они малы, а потому что они не нужны для определения первого приближения х.
Симметричные колебания. При этом в (4.8)  . Обозначим
. Обозначим

 (4.9)
(4.9)
Тогда (4.8) запишется в виде

Но, заметив, что
 ,
,
где  .
.
Получим
 (4.10)
(4.10)
Обозначим  , и согласно (4.4) и (4.9), имеем
, и согласно (4.4) и (4.9), имеем
 (4.11)
(4.11)
Представление (4.10) называется гармонической линеаризацией нелинейности, а величины q и q' — коэффициентами гармонической линеаризации.
Правая часть выражения (4.10) линейна при  , т. е. только для данного конкретного периодического решения. Но в целом она сохраняет нелинейные свойства, так как коэффициенты данного периодического решения зависят от искомого решения (от величины амплитуды колебаний переменной х). Эта особенность гармонической линеаризации и позволит нам в дальнейшем исследовать с ее помощью основные свойства и процессы в нелинейных автоматических системах.
, т. е. только для данного конкретного периодического решения. Но в целом она сохраняет нелинейные свойства, так как коэффициенты данного периодического решения зависят от искомого решения (от величины амплитуды колебаний переменной х). Эта особенность гармонической линеаризации и позволит нам в дальнейшем исследовать с ее помощью основные свойства и процессы в нелинейных автоматических системах.
Гармонически линеаризованная передаточная функция нелинейного звена имеет вид
 (4.12)
(4.12)
Передаточная функция нелинейного звена в результате подстановки  выражается в форме
выражается в форме
 (4.13)
(4.13)
Следовательно, передаточная функция нелинейности  зависит только от амплитуды и не зависит от частоты, в противоположность характеристикам линейных звеньев.
зависит только от амплитуды и не зависит от частоты, в противоположность характеристикам линейных звеньев.
Несимметричные колебания. При этом, согласно (4.7), будем иметь
 (4.14)
(4.14)
где  . (4.15)
. (4.15)
Поэтому в результате гармонической линеаризации вместо (4.10) —(4.11), согласно (4.8), (4.3) и (4.4), получим
 (4.16)
(4.16)
где
 (4.17)
(4.17)
 (4.18)
(4.18)
Как видно из (4.16), выходная величина нелинейности у содержит постоянную составляющую  и периодическую составляющую, выраженную как (4.15). зависит не только от и не только от α, но от обеих сразу. Это является существенным отличием нелинейного звена от линейного и обусловливает неприменимость здесь принципа суперпозиции, который составлял важное свойство линейных систем.
и периодическую составляющую, выраженную как (4.15). зависит не только от и не только от α, но от обеих сразу. Это является существенным отличием нелинейного звена от линейного и обусловливает неприменимость здесь принципа суперпозиции, который составлял важное свойство линейных систем.
Дата добавления: 2020-10-25; просмотров: 830;
Поиск по сайту
Узнать еще
- I. Понятие о методах воспитания.
- II. Основные положения
- II. Отклонения расположения поверхностей
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
