Обобщенная структурная система следящей РАС
Многие следящие РАС, рассмотренные ниже, могут быть сведены к обобщенной структурной схеме, которая представлена на рис. 3.1.
Функциональные устройства РАС, указанные в обобщенной схеме, включают устройства измерения сигнала ошибки и корректирующие устройства, предназначенные для создания необходимых динамических характеристик, управляющее устройство и объект управления.
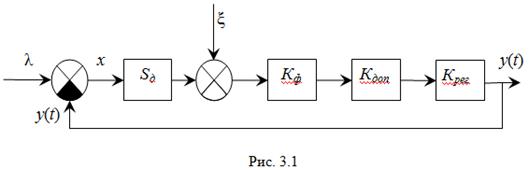
Работа РАС происходит в условиях действия различных помех, что учитывается введением возмущающего воздействия ξ(t), которое учитывает изменение регулировочных характеристик РАС из-за изменений условий окружающей среды, нестабильности источников питания и т. п.
В обобщенной РАС дискриминатор считается безынерционным и описывается параметром F(x) = Sд (крутизной дискриминационной характеристики).
Остальные элементы обобщают математические модели корректирующего устройства, устройства управления и элемента управления.
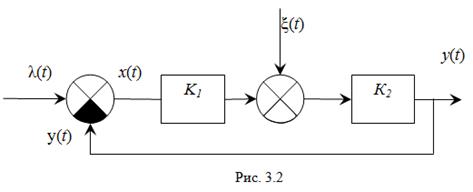
После преобразований данную схему можно упростить до обобщенной схемы, показанной на рис. 3.2 (K1 = Sд, K2 = Кф Кдоп Крег).
Порядок астатизма типовой следящей системы равен числу интеграторов v, включенных в контур управления.
Для задания №4, приведенного в [6], примем следующие ПФ звеньев РАС:
 ;
;  ;
;  .
.
7.Устойчивость линеаризованных непрерывных систем. Основные сведения об устойчивости
На любую РАС в процессе работы действуют различные возмущения, которые могут нарушить ее нормальную работу. Возникает вопрос об устойчивости системы к любым внешним воздействиям и возмущениям.
В простейшем случае понятие устойчивости связано со способностью системы с определенной точностью возвращаться в состояние равновесия (невозмущенное состояние) после исчезновения внешних возмущений, которые вывели РАС из этого состояния.
Различают устойчивость состояния равновесия и устойчивость движения. Считается, что строгое определение устойчивости было дано А. М. Ляпуновым в 1892 г. [10]. В упрощенной форме условие устойчивости сформулируем так.
Пусть y(t) – траектория возмущенного движения, y0(t) – траектория невозмущенного движения, а при t = 0 y(t) – y0(t) = δ(0).
В произвольный момент времени ti y(ti) – y0(ti) = δ(ti).
Если при всех t > 0 |y(t) – y0(t)| ≤ δ(0), а также |y(ti) – y0(ti)| < δ(ti-1), то динамическая система будет устойчивой.
Система асимптотически устойчива, если при t → ∞ область притяжения стягивается в точку:  .
.
Если система является устойчивой при любых возмущениях, то говорят о глобальной устойчивости.
Если вопрос об устойчивости в точке зависит от характера нелинейности и величины возмущений, то речь идёт о локальной устойчивости.
Динамика линеаризованной системы описывается уравнением
 , (4.1)
, (4.1)
где W(p) – ПФ разомкнутой системы.
(a0pn + an-1pn-1 + . . . + an) y(t) = (b0pm + bm-1pm-1 +. . . + bm) l(t) . (4.2)
Решение уравнения y(t) = yсв(t) + yвын(t) есть сумма свободной и вынужденной 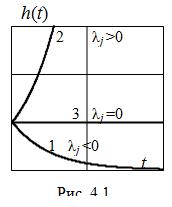 составляющих. Свободная составляющая усв(t) – это решение однородного дифференциального уравнения.
составляющих. Свободная составляющая усв(t) – это решение однородного дифференциального уравнения.
anpn + an-1pn-1 + . . . + a0 = 0 . (4.3)
Известно, что для полинома n-го порядка существует n корней (в общем случае комплексных) l1, l2,…, ln. Тогда полином (4.3) можно записать в виде
an(p – l1)(p – l2)(p – l3). . .(p – ln) = 0 . (4.4)
Для того, чтобы сделать вывод об устойчивости системы, необходимо определить характер переходного процесса.
Из дисциплины «Высшая математика» известно, что свободная составляющая yсв(t) описывает переходный процесс системы:
yсв(t) =  . (4.5)
. (4.5)
Пусть корень λj вещественный. Если λj < 0, то аргумент экспоненты в (4.5) отрицательный, переходный процесс будет иметь затухающий характер (график 1 на рис. 4.1). При λj > 0 аргумент экспоненты в (4.5) положительный и переходный процесс будет иметь нарастающий характер (график 2 на рис. 4.1). При λj = 0 экспонента превратится в константу (график 3 на рис. 4.1).
Корни, имеющие мнимые части, образуют комплексно-сопряженные пары: pi = αi + iβi, pi+1 = αi – iβi. Вещественная часть корней соответствует экспоненте в (4.6), мнимая часть – комбинации гармоник (синусов и косинусов) с циклической частотой w = βi :
yсв(t) =  . (4.6)
. (4.6)
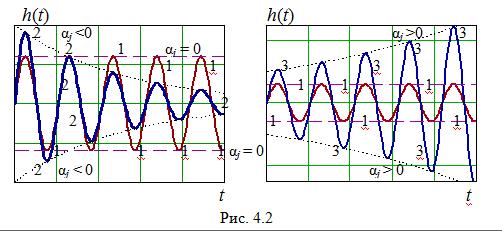
На рис. 4.2 представлены графики колебательных переходных процессов для вещественных частей (4.6) различных знаков: график 1 – αj = 0 (постоянные колебания с w = βi), график 2 – затухающий переходный процесс (αj < 0), график 3 – нарастающий переходный процесс (αj > 0).
Из проведенного анализа следует, что система будет устойчива, если корни характеристического уравнения лежат в левой комплексной полуплоскости. Если среди корней есть хотя бы один правый корень, то система неустойчива. Если корень имеет нулевую действительную часть, то система будет на границе устойчивости: нейтральной при λj = 0 (βi = 0 → a0 = 0) или колебательной (βi ¹ 0).
Предположим, что все корни левые. Подставим это условие в (4.4). После приведения подобных к виду (4.3) получим важный вывод о положительности коэффициентов aj характеристического полинома.
Необходимое условие устойчивости – все коэффициенты характеристического полинома (4.3) должны быть больше нуля. Решение о достаточности условия зависит от значений корней полинома.
Пример 4.1.
1. 4р5 + 16р4 + 8р2 + р + 12 = 0 – система неустойчива, так как коэффициент при р3 равен нулю.
2. 14р3 – 7р2 + 2р + 4 = 0 – система неустойчива, так как коэффициент при р2 отрицательный.
3. р5 + 7р4 + 8р3 + 9р2 + 4р + 2 = 0 – необходимое условие устойчивости выполняется, для определения устойчивости РАС необходимо найти корни полинома. (С помощью «Mathcad» можно проверить, что в данном случае все корни лежат в левой комплексной полуплоскости, значит, система будет устойчивой. )
Для сложных РАС порядок уравнений может быть значительным, и вычисление корней характеристического полинома оказывается затруднительным.
Устойчивость можно оценить, не прибегая к вычислениям корней, с использованием алгебраических и графоаналитических критериев, которые были разработаны во времена, когда не было компьютеров. Хотя в настоящее время вычисление корней характеристического полинома даже больших порядков трудностей не представляет, эти критерии не потеряли актуальности.
К алгебраическим относится критерий А. Гурвица, к частотным относятся критерии А. В. Михайлова, Г. Найквиста и др.
Дата добавления: 2020-10-25; просмотров: 715;
Поиск по сайту
Узнать еще
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CХЕМА ЭЛЕКТРОЛИЗА ВОДНЫХ РАСТВОРОВ ЭЛЕКТРОЛИТОВ
- DSM — система классификации Американской психиатрической ассоциации
- E) Расчет структурных составляющих очага деформации с одним нейтральным сечением
- F-распределение Фишера–Снедекора
- F06 Другие психические расстройства вследствие повреждения или дисфункции головного мозга, либо вследствие физической болезни
- F1х.5 Психотическое расстройство

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
