Передаточные функции непрерывных систем радиоавтоматики
Система состоит либо из отдельных элементов, либо устройств. Этот элемент (или устройство) выполняют какую-либо функцию. Эти устройства совместно дают новую функцию этой системе.
Уже есть навыки вывода передаточных функций отдельных элементов. Теперь стоит задача: зная передаточные функции устройств, находить передаточную функцию всей системы.
В структурных моделях систем радиоавтоматики широко встречаются три типа соединений динамических звеньев, которые представлены своими передаточными функциями:
1) Последовательное соединение динамических звеньев;
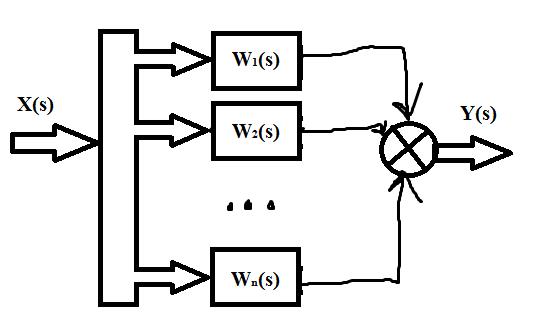
2) Параллельное соединение динамических звеньев;
3) Соединение с обратной связью.
Передаточные функции в первую очередь нужны для исследования переходного процесса.
Структурные модели, в которых используются передаточные функции, очень удобны для того, чтобы изучать (или проектировать) поведение регулируемой величины (выходной) в переходном режиме. Также можно найти комплексный коэффициент передачи, коэффициент передачи на любой частоте, фазовый сдвиг.
Последовательное соединение динамических звеньев:
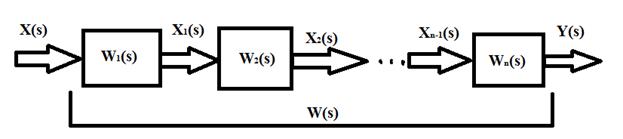
Надо заменить все эти передаточные функции на одну (W(s)).
Параллельное соединение динамических звеньев:
Соединение с обратной связью:
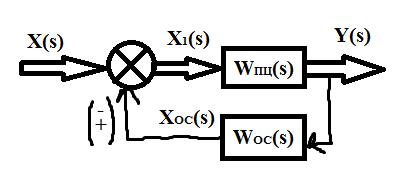
WПЦ – прямой цепи.

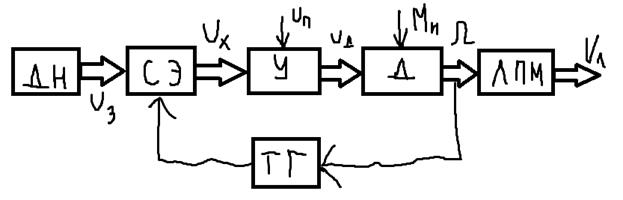
Рассмотрим вопрос нахождения передаточных функций статической САР угловой скорости.
Ранее было найдено несколько передаточных функций:
Для остальных элементов:
Сравнивающий элемент нелинейный. Для сравнивающего элемента входной величиной пусть является разница между uз и uтг. Выходной величиной является ux – сигнал ошибки. Таким образом, передаточная функция для средней строки:
В первый момент угловая скорость равна нулю (в момент пуска), uтг = 0, и разница будет равна uз. И сразу система сравнивающего элемента попадает на третью строку. Двигатель начнёт разгоняться, разница будет падать, и в момент времени t1 надо уже использовать вторую строчку. А в отрезок времени от 0 до uст ux = uСТ. ООС как бы разомкнута.
Будем строить структурную модель для динамического режима работы в отрезке времени 
Отрицательной обратной связи нет.
Переходим ко второму интервалу – tII = t1-Inf, ux = var.
ФЗ – передаточная функция замкнутой системы с ОС по задающему напряжению.
К – коэффициент передачи разомкнутой САР на нулевой частоте.
Найдём теперь вторую передаточную функцию замкнутой САР по моменту нагрузки.
Найдём вспомогательную передаточную функцию WВСП (цепь ОС) и введём вспомогательную переменную МН*.
Т.о. для второго интервала получается:

Дата добавления: 2020-10-25; просмотров: 603;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F06 Другие психические расстройства вследствие повреждения или дисфункции головного мозга, либо вследствие физической болезни
- F45.38 другие органы или системы
- I Этапы развития САSЕ-систем

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
