Лекция 14. Области применения модемов
По областям применения современные модемы можно подразделить на:
1. Модемы для коммутируемых телефонных каналов.
2. Модемы для физических соединительных линий.
3. Модемы для цифровых систем передачи.
4. Пакетные радиомодемы.
5. Модемы для сотовых систем связи.
1. Модемы для коммутируемых телефонных каналов. Коммутируемые телефонные каналы предоставляются потребителям коммутируемой телефонной сети общего пользования (КТСОП) на время соединения по их требованию. Такие каналы принципиально содержат в своем составе коммутационное оборудование автоматических телефонных станций (АТС), следовательно, модем для такого канала должен уметь различать их сигналы и передавать свои сигналы набора номера. Большинство современных модемов для КТСОП обеспечивают синхронную передачу данных по каналу.
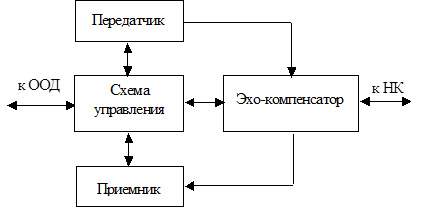
В общем виде структура синхронного модема (рис. 4.4) содержит приемник, передатчик, эхо-компенсатор и схему управления.
|
| Рисунок 4.4. Структура синхронного модема |
Схема управления, как правило, реализуется в виде микропроцессора универсального назначения и предназначена для обеспечения интерфейса с ООД и управления работой остальных частей модема.
Эхо-компенсатор предназначен для ослабления влияния помехи в виде электрического эха, т.е. собственного отраженного сигнала. При использовании коммутируемых каналов с двухпроводным окончанием организация дуплексной связи является не простой задачей. Для организации двусторонней связи используются два встречных канала, каждый из которых имеет двухпроводное окончание. При этом возникает необходимость соединения четырехпроводного окончания двустороннего канала с двухпроводной местной связью.
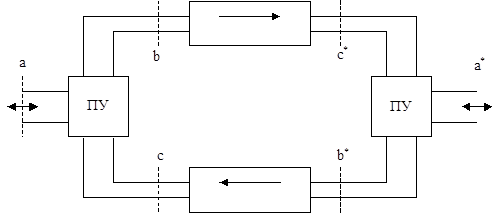
Это соединение осуществляется с помощью специальных переходных устройств (ПУ) (рис. 4.5).
|
| Рисунок 4.5. Схема включения переходных устройств |
При этом образуется цепь обратной связи b–c*–b*-c, которая и является причиной возникновения электрического эха.
Чтобы избежать этого необходимо в переходном устройстве обеспечить достаточно большое затухание в направлениях c – b и c* – b*, то есть «развязать» направления передачи и приема четырехпроводной части канала. При этом в направлениях a – b, c* – a*, a* – b*, c – a затухание переходного устройства должно быть минимальным. Это требование выполняется с помощью развязывающих устройств, входящих в состав переходных устройств.
Одним из наиболее часто используемых развязывающих устройств являются дифференциальные развязывающие устройства. Дифференциальное развязывающее устройство представляет собой уравновешенный мост. В одно из плеч моста включают двухпроводное окончание канала, три других плеча образуются из вспомогательных сопротивлений, а в диагонали моста включают цепи передачи и приема четырехпроводной части двустороннего канала. Подбирая величину одного из вспомогательных сопротивлений, мост уравновешивают или балансируют, обеспечивая тем самым отсутствие передачи сигнала из одной диагонали в другую, то есть создание большого затухания между направлениями передачи и приема. Применяются дифференциальные развязывающие устройства двух типов – резисторные и трансформаторные, причем последние чаще.
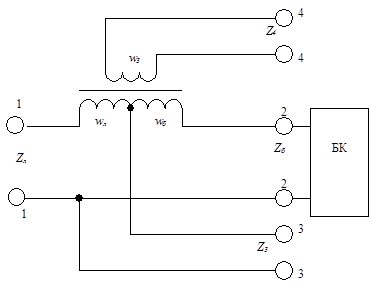
Трансформаторное развязывающее устройство (рис. 4.6) представляет собой дифференциальный трансформатор, к зажимам 1-1 которого подключается двухпроводная цепь, а к зажимам 2-2 уравновешивающий ее балансный контур (БК).
|
| Рисунок 4.6. Развязывающее устройство |
Зажимы 4-4 подключаются к передающей части четырехпроводного канала, а зажимы 3-3 к его приемной части.
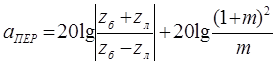
Затухание в направлении от зажимов 3-3 к зажимам 4-4 называется переходным и определяется по формуле:
 ,
,
где  называется коэффициентом неравноплечности. В аппаратуре в большинстве случаев устанавливаются равноплечие развязывающие устройства с m=1 , так что второе слагаемое в последней формуле 20lg2=6 дБ. Символом zб обозначено входное сопротивление балансного контура, zл – входное сопротивление линии, подключаемой к зажимам 1-1, а в целом первое слагаемое в приведенной формуле называется балансным затуханием:
называется коэффициентом неравноплечности. В аппаратуре в большинстве случаев устанавливаются равноплечие развязывающие устройства с m=1 , так что второе слагаемое в последней формуле 20lg2=6 дБ. Символом zб обозначено входное сопротивление балансного контура, zл – входное сопротивление линии, подключаемой к зажимам 1-1, а в целом первое слагаемое в приведенной формуле называется балансным затуханием:
 .
.
Балансное затухание тем больше, чем точнее входное сопротивление балансного контура уравновешивает входное сопротивление линии. При zб = zл балансное, а следовательно и переходное затухание будет равно бесконечности. Физически это объясняется тем, что ток, поступающий с приемной части канала (зажимы 3-3) при wб = wл и zб = zл делится пополам, то есть iб = iл. Эти токи образуют равные, но противоположно направленные магнитные потоки и, следовательно, во вторичной обмотке w3 и в сопротивлении z4 ток равен нулю. Все сказанное справедливо в том случае, когда токи iб = iл и направлены точно навстречу друг другу. Если в сопротивлении линии, например, преобладают активная и емкостная составляющие, а в сопротивлении балансного контура – активная и индуктивная, то указанные токи будут иметь разные фазы, во вторичной обмотке трансформатора появится ток и переходное затухание уменьшится. Как известно, входное сопротивление линии, нагруженной на согласованное с ним сопротивление, равно ее волновому сопротивлению. Волновое сопротивление содержит активную и реактивную составляющие, каждая из которых изменяется с изменением частоты, причем характер их изменений разный. В связи с этим подобрать входное сопротивление балансного контура, точно равное входному сопротивлению линии особенно в широкой полосе частот практически невозможно. Поэтому, например, в полосе тональных частот 0,3 – 3,4 кГц переходное затухание дифференциальной системы обычно не превышает 30дБ, а при расширении используемой полосы частот оно будет еще меньше, то есть величина сигнала электрического эха возрастет.
Для борьбы с электрическим эхом возможно использование следующих методов:
1) применение самобалансирующихся дифференциальных систем. Этот метод часто экономически невыгоден из-за большой технической сложности и высокой стоимости систем самобалансировки;
2) частотное разделение каналов. При использовании этого метода полоса канала разделяется на два частотных подканала, по каждому из которых сигнал передается в одном направлении. Недостаток метода – полоса канала используется не в полном объеме;
3) применение эхо-компенсаторов. Суть метода состоит в том, что на этапе установления соединения модем посылает определенный зондирующий сигнал, принимает вызванный им эхо-сигнал и по нему определяет параметры эхо-отражения: время запаздывания, амплитудные и фазовые искажения, мощность. По этим параметрам настраивается эхо-компенсатор, структурно представляющий собой линию задержки с отводами, в каждом из которых установлен усилитель с регулируемым коэффициентом усиления, и сумматор, суммирующий сигналы с выходов усилителей. В процессе дальнейшей работы осуществляется вычитание принимаемого сигнала и сигнала с выхода сумматора, который является более или менее точной копией эхо-сигнала. Технология эхо-компенсации позволяет отвести для дуплексной передачи всю ширину полосы канала, однако требует значительных вычислительных ресурсов для обработки сигнала.
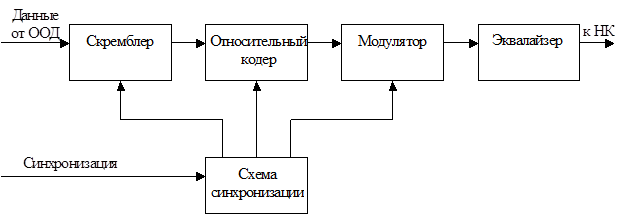
Данные, передаваемые ООД, поступают в передатчик модема, который выполняет операции скремблирования, относительного кодирования, модуляции и синхронизации.
Кроме того, он иногда вносит предискажения, компенсирующие нелинейности АЧХ и ФЧХ канала. Эту функцию выполняет эквалайзер. Структуру передатчика можно представить следующим образом (рис. 4.7).
|
| Рисунок 4.7. Структура передатчика модема |
Схема синхронизации получает сигнал опорной частоты от внутреннего генератора модема, либо от ООД.
Скремблер предназначен для придания свойств случайности передаваемой последовательности данных с целью облегчения выделения тактовой частоты приемником удаленного модема и получения более равномерного спектра передаваемого сигнала.
Применение относительного кодирования при использовании фазовой модуляции и производных от нее позволяет решить проблему неоднозначности фазы восстанавливаемой на приеме несущей.
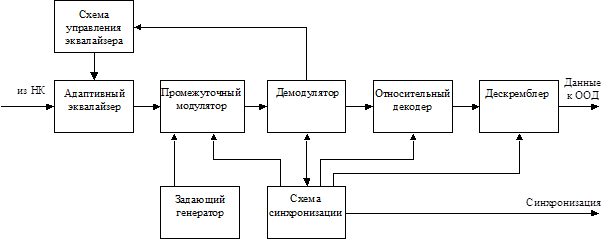
Приемник (рис. 4.8) типового синхронного модема в свою очередь содержит адаптивный эквалайзер со схемой управления, промежуточный модулятор с задающим генератором, демодулятор, относительный декодер, дескремблер и схему синхронизации.
|
| Рисунок 4.8. Структура приемника модема |
Адаптивный эквалайзер приемника, как и эквалайзер передатчика, позволяет компенсировать нелинейные искажения, вносимые каналом передачи. Адаптивность эквалайзера заключается в его способности подстраиваться под изменяющиеся параметры канала в течение сеанса связи. Для этого сигнал ошибки фазы с демодулятора поступает на схему управления, которая вырабатывает управляющие сигналы для эквалайзера. Сам эквалайзер структурно состоит из линии задержки с отводами и набора управляемых усилителей с изменяемыми коэффициентами усиления.
Промежуточный модулятор приемника совместно с задающим генератором позволяет перенести спектр принимаемого сигнала в область более высоких частот. Это делается для облегчения операций фильтрации и демодуляции.
Относительный декодер и дескремблер выполняют операции, обратные выполняемым относительным кодером и скремблером в передатчике.
Схема синхронизации выделяет тактовую частоту из принимаемого сигнала и подает ее в остальные узлы приемника.
Остановимся более подробно на работе скремблера.
Двоичный сигнал на входе передатчика может иметь произвольную статистическую структуру, которая не всегда удовлетворяет требованиям, предъявляемым синхронным способом передачи.
Среди этих требований основными являются следующие:
1) частота смены символов (0 и 1) должна обеспечивать надежное выделение тактовой частоты непосредственно из принимаемого сигнала;
2) спектральная плотность мощности передаваемого сигнала должна быть по возможности постоянной и сосредоточенной в заданной области частот с целью снижения взаимного влияния каналов.
Приведенные требования должны выполняться вне зависимости от структуры передаваемого сообщения. Поэтому в модемах исходная последовательность часто подвергается определенной обработке. Смысл этой обработки состоит в получении последовательности, в которой статистика появления нулей и единиц приближается к случайной, а это позволяет удовлетворить обоим названным выше требованиям. Одним из способов такой обработки является скремблирование (перемешивание).
Скремблирование – это обратимое преобразование структуры цифрового потока без изменения скорости передачи с целью придания ему свойств случайной последовательности.
Основной частью скремблера является генератор псевдослучайной последовательности (ПСП) в виде линейного n-разрядного регистра сдвига с сумматорами по модулю два в цепи обратной связи, формирующего последовательность максимальной длины с периодом 2n-1.
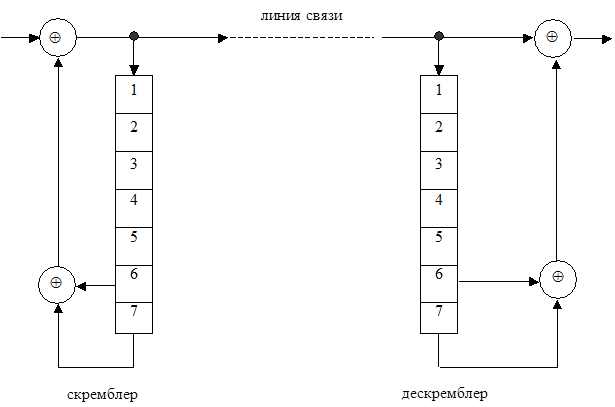
Различают два основных типа цифровых скремблеров – дескремблеров: 1) самосинхронизирующиеся и 2) с начальной установкой или аддитивные. Схему пары самосинхронизирующихся скремблера - дескремблера можно представить следующим образом (рис. 4.9).
Особенностью самосинхронизирующегося скремблера является то, что он управляется самой скремблированной последовательностью, т.е. той, которая направляется в канал. Поэтому в этом случае не требуется специальной установки состояний скремблера и дескремблера, поскольку они оказываются идентичными в результате записи в их регистры одной и той же скремблированной последовательности. При потере синхронизации между скремблером и дескремблером время ее восстановления не превышает числа тактов, равного числу разрядов регистра сдвига скремблера.
|
| Рисунок 4.9. Структура самосинхронизирующихся скремблера и дескремблера |
Одним из недостатков самосинхронизирующегося дескремблера является присущее ему свойство размножения ошибок. В общем случае влияние одного ошибочно принятого бита будет проявляться a раз, где a - число обратных связей регистра. Этот недостаток ограничивает число обратных связей, которое практически не превышает a=2, т.е. полином, описывающий регистр имеет вид xn + xm + 1. Второй недостаток самосинхронизирующегося скремблера связан с возможностью появления на его входе т.н. «критических ситуаций», когда выходная последовательность приобретает периодический характер с периодом, меньшим периода ПСП. Для предотвращения таких ситуаций согласно рекомендациям ITU-T предусматриваются специальные дополнительные схемы контроля, которые выявляют периодичность элементов на входе и нарушают ее.
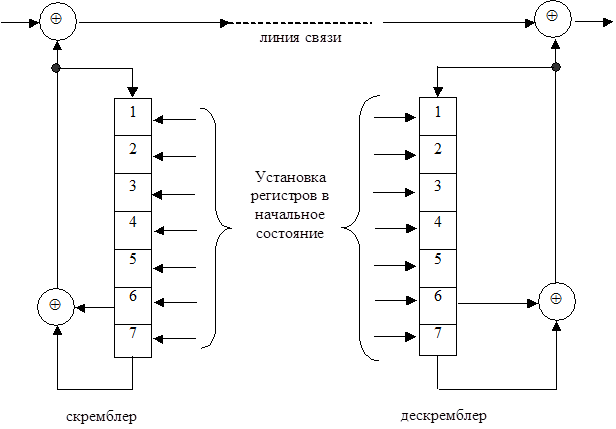
Недостатки, свойственные самосинхронизирующимся скремблерам, практически отсутствуют при аддитивном скремблировании. В этой схеме (рис. 4.10) скремблированная последовательность не поступает на входы регистров скремблера и дескремблера.
|
| Рисунок 4.10. Структура адаптивных скремблера и дескремблера |
Однако в такой паре требуется предварительная идентичная установка состояний регистров скремблера и дескремблера. Отсутствие эффекта размножения ошибок и необходимости защиты от критический ситуаций делают способ аддитивного скремблирования более предпочтительным, если не учитывать затрат на решение задачи взаимной синхронизации (идентичной начальной установки) скремблера и дескремблера.
О влиянии скремблирования на энергетический спектр сигнала можно сказать, что если период ПСП M=2n-1, то число спектральных составляющих в той же полосе частот увеличивается в М раз, а уровень каждой составляющей уменьшается в такое же число раз.
2. Модемы для физических соединительных линий. Основное отличие этих модемов от модемов других типов состоит в том, что полоса пропускания физических линий не ограничена значением 3,1 кГц, характерным для КТСОП. Однако и она является ограниченной и зависит от типа передающей среды и ее длины.
С точки зрения используемых для передачи сигналов модемы для физических линий могут быть разделены на:
1) модемы низкого уровня или линейные драйверы или модемы на короткие расстояния, использующие для передачи цифровые сигналы;
2) модемы основной полосы, в которых применяются методы модуляции, аналогичные применяемым в модемах для КТСОП.
В модемах первой группы обычно используются цифровые методы биимпульсной передачи, позволяющие формировать импульсные сигналы без постоянной составляющей и часто занимающие более узкую полосу частот, чем исходная цифровая последовательность. В модемах второй группы часто используются различные виды квадратурной амплитудной модуляции, позволяющие радикально сократить требуемую для передачи полосу частот.
Контрольные вопросы к лекции 14
14-1. Перечислите элементы структуры синхронного модема для КТСОП.
14-2. Для чего предназначена схема управления в структуре синхронного модема для КТСОП?
14-3. Для чего предназначен эхо-компенсатор в структуре синхронного модема для КТСОП?
14-4. Для чего предназначены переходные устройства?
14-5. Что является причиной возникновения электрического эха?
14-6. Что представляет собой дифференциальное развязывающее устройство?
14-7. Что представляет собой трансформаторное развязывающее устройство?
14-8. Какое затухание дифференциального развязывающего устройства называется переходным?
14-9. Какое затухание дифференциального развязывающего устройства называется балансным?
14-10. Какие методы используются для борьбы с явлением электрического эха?
14-11. В чем состоит суть метода эхо-компенсации?
14-12. Какую функцию в составе передатчика модема реализует эквалайзер?
14-13. Какую функцию в составе передатчика модема реализует схема синхронизации?
14-14. Какую функцию в составе передатчика модема реализует скремблер?
14-15. Какую функцию в составе передатчика модема реализует относительный кодер?
14-16. Какую функцию в составе приемника модема реализует адаптивный эквалайзер?
14-17. Какую функцию в составе приемника модема реализует промежуточный модулятор?
14-18. Какие требования предъявляет синхронный способ передачи к статистической структуре передаваемой двоичной последовательности?
14-19. Что называется скремблированием?
14-20. Что является основной структурной составляющей цифрового скремблера?
14-21. Назовите основные типы цифровых скремблеров.
14-22. Каковы недостатки самосинхронизирующихся дескремблеров?
14-23. Каковы недостатки аддитивного скремблирования?
14-24. Как скремблирование влияет на энергетический спектр сигнала?
14-25. На какие группы могут быть разделены модемы для физических линий?
14-26. В чем основное отличие модемов низкого уровня от модемов основной полосы?
Дата добавления: 2020-10-14; просмотров: 849;
Поиск по сайту
Узнать еще
- V. Научно-технический прогресс в области средств связи и информатики
- Актуальные проблемы природопользования Нижегородской области.
- Акты правоприменения права
- Акты применения норм права: понятие, структура, классификация, эффективность. Отличие правоприменительных актов от нормативно-правовых
- Акты применения права
- Акты применения права
- Акты применения права
- Анализ отклонений области реализации 2 в сравнении с областью 1.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
