Геометрическая неопределенность контактных пар.
При конструктивной реализации конкретных схем базирования встречаются ограничения, которые принуждают учитывать отклонения от исходных схем базирования и допускать ряд условностей в определении классов контактных пар. Рассмотрим ограничения, связанные с геометрической неопределенностью типовых контактных пар.
Реальные контуры и размеры площадок контакта в сопряжениях контактных пар отличаются от номинальных контуров и размеров вследствие погрешностей формы сопрягаемых поверхностей деталей.
Контакт по точке в действительности из-за погрешности микроформы (шероховатости) сопрягаемых поверхностей представляет собой малого размера пятно неопределённой конфигурации, а контакт по линии имеет некоторую ширину и, в следствии погрешностей макроформы и волнистости, имеет разрывы по длине и обращается в ряд вытянутых пятен неопределенной длины; контакт поверхностей распадается на пятна, формы, размеры и положения которых неопределённы (рис.2.8). Представления о контакте в реальных сопряжениях можно получить при контроле качества контакта с помощью красящих паст.
а) б) в) 


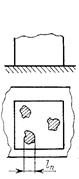
Рис. 2.8. Геометрическая неопределенность контакта реальных поверхностей при контакте:
а – по точке; б – по линии; в – по плоскости.
Таким образом, все виды контакта имеют геометрическую неопределенность в сопряжении контактной пары, наибольшую для контакта поверхностей и наименьшую для контакта по точкам. Эта неопределенность снижает несущую способность сопряжения, а также точность соединения.
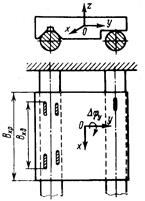 Если, например, длина ползуна в направляющих рис.2 определена из условия ограничения поворотов его при движении вокруг оси Оу по формуле:
Если, например, длина ползуна в направляющих рис.2 определена из условия ограничения поворотов его при движении вокруг оси Оу по формуле:
Δ φу= Δq/Вх
где Δq – погрешность вызывающая поворот ползуна; Вх– его длина, то в следствие неопределенности положения пятен контакта действительная ошибка положения ползуна будет в
Вх/Вхд раз превышать расчетную.
Рис.2.9. Геометрическая неопределённость контакта в цилиндрических направляющих.
Очевидно, что для несущей способности всегда будет более опасной неопределенность размеров пятен, а для точности – неопределенность их положения. Таким образом, наиболее благоприятным для точности соединений является контакт по точкам и наименее благоприятным – контакт по поверхности. С этим связано представление о методах конструирования: кинематическом – с контактом по точкам, полукинематическом – с контактом по линиям и машиностроительном – с контактом по поверхностям. Предпочтительны для точного приборостроения первые два метода, однако использование их на практике ограничивается лишь малонагруженными соединениями лабораторных приборов при отсутствии динамического режима. Более широко в точном приборостроении применяются контактные пары с контактом по поверхностям.
Размеры естественно образуемых пятен зависят от качества сопрягаемых поверхностей. Таким образом, ослабление вредного влияния геометрической неопределенности контактных пар связанно с ужесточением требований (и с повышением стоимости соответственно) к качеству поверхностей по всем показателям.
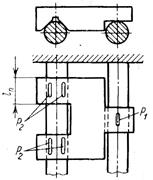
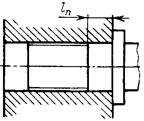
Рис. 2.10. Повышение геометрической определенности с помощью
конструктивных выборок.
Для повышения геометрической определенности положения пятен контакта применяется «управление» их положением с помощью системы выборок (рис.3) на сопрягаемых поверхностях деталей. Размеры выступов Ln делают равными размерам пятен контакта, чтобы в пределах выступа не было разрыва контактирующих поверхностей; эти размеры в должны в то же время соответствовать силовому режиму прибора и обеспечивать требуемую несущую способность сопряжения. Вопрос о том, где именно следует делать выборки – на базовой или базируемой детали, решается на основе общих соображений технологичности изготовления деталей.
2.7. Преобразование классов контактных пар.
Основным видом ограничений, встречающихся при реализации исходных схем базирования являются допущения в определении классов контактных пар, связанные с технологическими погрешностями размеров, форм и положений сопрягаемых поверхностей реальных контактных пар.
Рассмотрим допущения, принимаемые в связи с использованием выборок на сопрягаемых поверхностях контактных пар. Выборка на оси (рис.2.11), очевидно, не изменит класс контактной пары (р4), а две образовавшиеся кольцевые поверхности естественно теперь считать парами класса (р2).
Рис. 2.11. Выборка на оси валика.
Это дает нам право рассматривать независимые опоры валика рис.2.12,а, как связи класса (р2), если они расположены далеко друг от друга (вх « Вх)
| |
а) б)
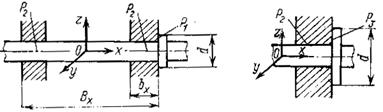
Рис. 2.12. Базирование валиков.
а – по цилиндру (связь р4 )и буртику (связь р1); б – по цилиндрическому пояску (связь р2) и фланцу (связь р3)
На том же основании при базировании валика на узкой стенке (рис.2.12,б) радиальную кольцевую опору следует рассматривать как пару класса р2 и для достаточной определенности базирования (ограничение еще трех степеней свободы валика) увеличивают диаметр буртика (в этом случае его называют фланцем), опорная плоскость которого образует пару класса р3. При d »bx повороты валика вокруг осей y и zбудут ограничиваться фланцем, а не цилиндрическим пояском. Применение буртиков для ограничения осевых смещений валиков является типовым и наиболее распространенным решением данной задачи.
Рассмотрим допущения, встречающиеся при базировании деталей призматической формы.
а) б) в)
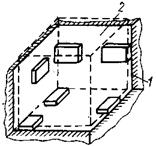
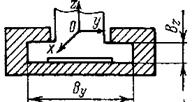
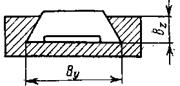
Рис. 2.13. Базирование деталей призматической формы.
Наиболее характерно для них базирование по плоскостям. Оптимальной по геометрической определенности и несущей способности для призматических тел является схема базирования, у которой точечные связи заменены выступами, образующими регламентированные пятна контакта, как показано на рис. 2.13. (базируемая деталь изображена условно штрихами в виде призмы).
Наибольшим приближением к оптимальной схеме могут служить конструкции призматических направляющих поступательного движения приведенные на рис.2.13, б,в,у которых высота ползуна Вz мала по сравнению с шириной Вy.
На опорной плоскости ползуна делают обычно продольную выборку (в целях получения геометрической определенности пары), создающую по бокам две полоски. Вместе с опорной плоскостью они выполняют функцию связи класса р3. Одно из допущений при определении класса состоит в том, что эти полоски не рассматривают как независимые связи класса р3 в соответствии с таблицей элементарных контактных пар. Другое относится к боковой грани ползуна, ограничивающей поперечные его смещения: её считают связью класса р2 хотя по таблице она, как плоскость, относится к классу р3. Объясняется это тем, что ввиду малой её ширины по сравнению с шириной ползуна она не может дублировать опорную плоскость в ограничении поворотов ползуна вокруг оси Х.
При базировании призматических тел в неподвижных соединениях оптимальную схему по рис.6а применяют весьма редко из-за сложности её конструктивной реализации и не технологичности при изготовлении и сборке. На практике используют упрощенные схемы базирования. Рассмотрим для примера базирование неподвижного кронштейна 2 на плоской поверхности некоторой базовой детали 1 (рис.2.14).
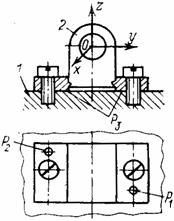
Рис. 2.14. Неподвижное базирование кронштейна на плоскости.
В соответствии с исходной схемой (рис.2.5, б) оставляют нижнюю опорную плоскость, представляющую связь класса р3, остальные же три степени свободы ограничивают стальными штифтами. На опорной плоскости базируемой детали делают выборку в целях повышения геометрической определенности её контакта, но обе образовавшиеся площадки рассматривают совместно как связь класса р3 (первое допущение). Роль штифтов различна: один из них выполняет функцию связи класса р2, второй-функцию связи класса р1 (второе допущение). Остановимся на этих связях более подробно. Принятие как первого, так и второго допущения основано на предположении о совместной обработке и малых размеров базирующих элементов, что возможно только в случае зависимой обработки отверстий под штифты в обоих деталях.
Таким образом, ввиду неизбежности технологических погрешностей размеров, форм и положений базирующих элементов соединяемых деталей действительные схемы базирования могут отличаться от исходных схем. Поводом к отступлениям от них служит стремление к упрощению конструкции и к её технологичности.
Дата добавления: 2019-02-08; просмотров: 1098;
Поиск по сайту
Узнать еще
- А) Распределение контактных напряжений по длине очага деформации
- Алкены. Геометрическая (цис-, транс-) изомерия, конфигурации
- Арифметическая и геометрическая прогрессии. Арифметическая прогрессия
- Вывод расчетных формул контактных напряжений в очаге деформации с одним нейтральным сечением
- Г) Система уравнений для получения расчетных формул контактных напряжений
- Геометрическая анизотропия
- Геометрическая вероятность
- Геометрическая вероятность

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
