Классификация и свойства контактных пар.
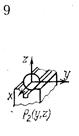
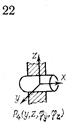
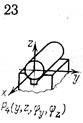
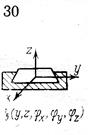
Материальные связи, с помощью которых ограничиваются лишние степени свободы деталей в соединениях, представляют собой контактные пары, т.е. пары сопрягаемых поверхностей этих деталей. Возможные виды элементарных контактных пар подразделяются на шесть групп– в зависимости от сочетаний форм сопрягаемых поверхностей и на пять классов– по числу отнимаемых парой степеней свободы. 1–й класс (Р1) означает, что пара ограничивает одну степень свободы, 2–й класс (Р2) – две степени свободы и т.д. Все пары класса Р1 имеют контакт по точке, а пары класса Р2 – по линиям. Эти пары называются высшими контактными парами и используются для образования высших кинематических пар, но иногда их применяют и в неподвижных базирующих соединениях так называемого кинематического и полукинематического типов. Низших элементарных пар Р3 с контактом по поверхности существует мало, хотя в реальных конструкциях приборов они играют доминирующую роль. Кроме элементарных, образованных лишь двумя поверхностями, в таблицу1 включены условно не элементарные, но весьма распространенные пары: высшие (9 и 23) и низшие (28 и 30).
Пары класса Р1 могут ограничивать только одно смещение по направлению к общей нормали к точке контакта; для ограничения одного поворота необходима пара класса Р2 с контактом по прямой линии. Конкретные степени свободы, ограничиваемые каждой парой, указаны внизу каждой клетки таблицы.
Важным свойством элементарных контактных пар является их взаимная эквивалентность, которая выражается в том, что пары высших классов могут быть заменены парами низших классов.
Таблица 2.2
| Сочетание форм поверхн. | Классы контактных пар | ||||
| Р1 | Р2 | Р3 | Р4 | Р5 | |
| Сфера и сфера | 
| 
| |||
| Сфера и цилиндр | 
| 
| 
| ||
| Сфера и плоскость | 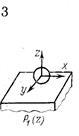
| 
| |||
| Цилиндр и цилиндр | 
| 
| 
| 
| |
| Цилиндр и плоскость | 
| 
| |||
| Плоскость и плоскость | 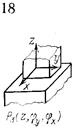
| 
|
Например, любая пара класса Р2 с контактом по линии, может быть заменена двумя точечными парами класса Р1; пара класса Р3 – либо сочетанием пары класса Р2 с контактом по прямой линии и пары класса Р1, либо тремя точечными парами класса Р1 и т. д. Это свойство эквивалентности широко используется при разработке схем базирования деталей и сложных систем.
Из таблицы следует так же, что одиночными элементарными парами нельзя ограничить большое число степеней свободы, поэтому реальное конструирование соединений основано на комбинировании элементарных пар в различных сочетаниях. Эти сочетания не стандартизованы, и поэтому на практике встречается весьма большое их разнообразие.
2.5. Основы базирования деталей.
Базированием называют придание материальным телам определенного и строго фиксированного положения в пространстве. Применительно к конструированию соединений деталей под базированием понимают придание определенного заданного чертежом положения присоединяемой детали относительно базовой.
Модель процесса конструирования базирующих соединений следующая:
– формулируется задача, которую надо решить (например, требуется осуществить вращательное или поступательное движение или разработать неподвижную несущую систему и т. п.);
– определяется тип базируемой детали;
– выявляются виды и число лишних степеней свободы базируемой детали;
– устанавливаются ограничения (по исходным данным, условиям компоновки конструкции в целом и т. д );
– выбирается схема базирования и виды контактных пар.
Схема базирования показывает сочетание контактных пар и их взаимное расположение, необходимые для ограничения лишних степеней свободы у деталей заданного типа. Составление конкретных схем базирования основано на выборе оптимального сочетания элементарных контактных пар в соответствии с числом ограничиваемых степеней свободы. Существуют исходные (обобщенные) схемы базирования для типовых форм базируемых тел. Рассмотрим эти схемы.
На рис. 2.5. изображены обобщенные схемы базирования призматического тела, составленные с учетом свойства эквивалентности контактных пар
а) б) в)

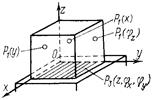
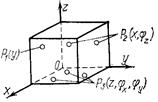
Рис. 2.5. Исходные схемы базирования призматических тел со связями:
а – Р3,Р2 и Р1; б – Р3 и Р1; в – Р1
Из рисунка видно, что для призматического тела возможно принудительное ограничение всех шести степеней свободы несколькими способами. Так, нетрудно придать ему поступательное движение, убрав, например, контактную пару, препятствующую смещению по оси Оу, но невозможно осуществить неограниченное вращательное движение. Выбор конкретного варианта схемы зависит от силового и динамического режимов работы соединения; наиболее употребительны схемы на рис.1а,б, наивысшую геометрическую определенность обеспечивает схема на рис. 1в.
На рис. 2.6. приведены три исходные схемы базирования тела цилиндрической формы с тремя видами контакта (по поверхности, линиям и точкам), эквивалентные по числу отнимаемых степеней свободы (из них наиболее употребительны первые две).
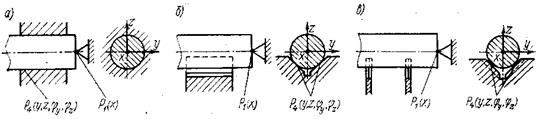
Рис. 2.6. Исходные схемы базирования цилиндрических тел со связями:
а – Р4 и Р1; б – Р2 и Р1; в – Р1
Из рисунка видно, что у цилиндра можно принудительно ограничить лишь пять степеней свободы. С помощью элементарных контактных пар нельзя устранить поворот цилиндра вокруг его оси. Для этого используют шпонку или силовую связь. Этим объясняется преимущественное применение цилиндрических тел для осуществления вращательного движения.
На рис. 2.7. приведены схемы базирования тела шаровой формы так же с тремя эквивалентными видами контакта: по поверхности, кольцевой линии и двум точкам. У шара можно отнять с помощью элементарных контактных пар только три степени свободы (смещения); для ограничения трех других степеней свободы (поворотов) необходимы дополнительные конструктивные средства. Отмеченное свойство тел шаровой формы обусловило широкое их применение в устройствах юстировки и настройки когда требуется самоустановка (или регулировка) по трем угловым координатам.
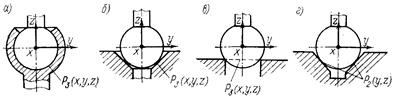
Рис. 2.7. Исходные схемы базирования тел шаровой формы:
а – с одной связью Р3; б – по конической поверхности связь Р3;
в – по кромке цилиндрического отверстия связь Р3; г – по
призматической канавке связь Р2
Дата добавления: 2019-02-08; просмотров: 1188;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- I. Товар и его свойства.
- II Классификация САSЕ-средств
- II. Классификация документов
- II.3. Физико-химические свойства нефтей и природных газов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Классификация методов воспитания.
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
