Активной массы от соотношения частот при различных величинах затухания в горизонтальном направлении системы
 ;
; 

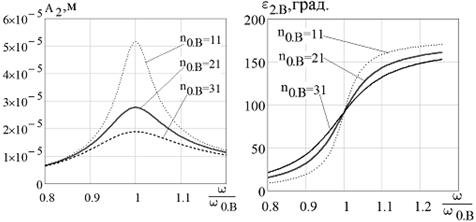
Используя (13) и (14) и также задавая примерные параметры системы строим графики, выражающие зависимость амплитуды и угла сдвига фаз активной массы от соотношения частот (рис. 4).
А б
Рис. 4. Графики зависимости амплитуды (а) и угла сдвига фаз (б)
Активной массы от соотношения частот при различных величинах затухания в вертикальном направлении системы
Таким образом, предлагается новое конструктивное решение вибрационных загрузочных устройств с асинхронным возбуждением колебания в горизонтальном и вертикальном направлениях, в котором управление происходит по одному каналу и настройка фазового угла обеспечивается только лишь механической частью приводов.
Список литературы
1. Колебания машин / Диментберг Ф.М. [и др]. М.: Машиностроение, 1964. 308 с.
2. Автоматическая загрузка технологических машин: справочник / И.С. Бляхеров [и др]; Под ред. Клусова И.А. М.: Машиностроение, 1990. 400 с.
3. Автоматизация загрузки прессов штучными заготовками / В.Ф. Прейс [и др]; Под ред. В.Ф. Прейса. М.: Машиностроение, 1975. 280 с.
Оценка возможности применения маятниковой схемы в конструкции стенда для динамических испытаний гравиметров
Динамические испытания гравиметров позволяют проверить правильность их схемных и конструктивных решений, оценить уровень и выявить источники погрешностей измерения, исключить использование непригодных приборов.
Задачи динамических испытаний гравиметров, имеющих сложный состав, многогранны:
- проверка соответствия работы датчика теории колебательной системы с одной степенью свободы;
- проверка линейности работы жидкостного фильтра (системы демпфирования) при подавлении высокочастотных (по сравнению с полезным сигналом) вертикальных возмущающих ускорений;
- проверка работы системы гироскопической стабилизации и собственно гравиметра в условиях многокомпонентных возмущений от поступательных и вращательных движений;
- выявление возникающих при этом систематических погрешностей измерений силы тяжести и прогнозирование точности измерений при конкретном фоне возмущений;
- оценка степени искажения и точности регистрации полезного сигнала;
- определение надежности и работоспособности всей системы в условиях возмущающих воздействий, близких к реальным воздействиям.
Работы по созданию низкочастотных стендов для динамических испытаний гравиметров, построенных на основе шарнирно-рычажных механизмов, велись в ТулГУ в течение двадцати лет. Был создан ряд стендов широко используемых до настоящего времени в различных организациях при создании гравиметрического оборудования [1].
Отличительной особенностью стенда «Нормаль СЗ», разработанного и изготовленного для динамических испытаний гравиметров по техническому заданию ЦНИИЭЛЕКТРОПРИБОР (г. С.-Петербург), является возможность испытаний одновременно трех приборов массой до 500 кг на рабочем столе размером 1300×1800 мм с амплитудой 0…2700 мм и с периодами от 11 до 200 с. Кинематическая схема стенда «Нормаль СЗ» изображена на рис. 1.
Рис. 1. Кинематическая схема стенда «Нормаль С3»
Испытываемая аппаратура (масса  ) устанавливается на рабочем столе, связанном со стойкой С'С (длина стойки
) устанавливается на рабочем столе, связанном со стойкой С'С (длина стойки  ) двойным шарнирным параллелограммом АВВ'А' - ВВ'С'С, который удерживает стол от наклонов. Прямолинейное движение стола по вертикали обеспечивается эллипсографом, состоящим из рычагов АВ и СВ (длина рычагов
) двойным шарнирным параллелограммом АВВ'А' - ВВ'С'С, который удерживает стол от наклонов. Прямолинейное движение стола по вертикали обеспечивается эллипсографом, состоящим из рычагов АВ и СВ (длина рычагов  ) и ролика с центром в точке F, движущегося в прямолинейной горизонтальной направляющей. Для разгрузки ролика рычаги АВ и В'А" кинематически связаны парой зубчатых секторов с центрами в точках В и В'. Подвижные части стенда уравновешены двумя противовесами, один из которых массой
) и ролика с центром в точке F, движущегося в прямолинейной горизонтальной направляющей. Для разгрузки ролика рычаги АВ и В'А" кинематически связаны парой зубчатых секторов с центрами в точках В и В'. Подвижные части стенда уравновешены двумя противовесами, один из которых массой  расположен непосредственно на рычажной системе АВВ'А' и уравновешивает ее, а другой – массой
расположен непосредственно на рычажной системе АВВ'А' и уравновешивает ее, а другой – массой  , связан через систему канатов и блоков с рабочим столом и уравновешивает испытываемую аппаратуру и стол. Противовес выполнен наборным по 16 кг, чтобы осуществить уравновешивание при изменении массы аппаратуры. Рычаг АВ совершает колебательное движение, которое через шарнирный параллелограмм АЕDО сообщает ему приводной сферический четырехзвенный механизм. Кривошип, вращаясь с постоянной угловой скоростью ωд, задает колебательное движение крестовине относительно горизонтальной оси O и передает угловые колебания рычажной системе стенда. Закон движения рабочего стола
, связан через систему канатов и блоков с рабочим столом и уравновешивает испытываемую аппаратуру и стол. Противовес выполнен наборным по 16 кг, чтобы осуществить уравновешивание при изменении массы аппаратуры. Рычаг АВ совершает колебательное движение, которое через шарнирный параллелограмм АЕDО сообщает ему приводной сферический четырехзвенный механизм. Кривошип, вращаясь с постоянной угловой скоростью ωд, задает колебательное движение крестовине относительно горизонтальной оси O и передает угловые колебания рычажной системе стенда. Закон движения рабочего стола

где  – длина рычагов (см. рис. 1);
– длина рычагов (см. рис. 1);  -–угловое перемещение рычагов; δ – угол раствора кривошипа, соответствующий радиусу кривошипа.
-–угловое перемещение рычагов; δ – угол раствора кривошипа, соответствующий радиусу кривошипа.
Ускорение рабочего стола определяется выражением
 .
.
Рычаг АЕ, совершающий маятниковые колебания,снабжен противовесом массой  , установленном на плече
, установленном на плече  .
.
С целью удобства обслуживания аппаратуры на столе предусмотрена его фиксация в среднем положении с помощью специального штока, который проходит через отверстия А' на стойке каркаса стенда и С' на стойке стола. Несущая конструкция стенда (сборной каркас) установлен на отдельном фундаменте, не связанном со строительными элементами здания.
Проведенные исследования показали, что возможности стенда «Нормаль СЗ» значительно шире. Спектральные характеристики регулярного выходного сигнала стенда можно существенно приблизить к спектральным характеристикам реальных возмущений за счет изменения по определенному закону радиуса кривошипа приводного механизма.
Тогда закон движения рабочего стола принимает вид
 ,
,
где  – переменная длина кривошипа;
– переменная длина кривошипа;  – отношение угловой скорости кривошипа к частоте изменения радиуса.
– отношение угловой скорости кривошипа к частоте изменения радиуса.
Из последнего выражения следует, что за счет изменения радиуса кривошипа, можно получить требуемый условиями испытаний вид спектра  , близкий к реальному полученному сигналу от качки корабля.
, близкий к реальному полученному сигналу от качки корабля.
Определим значения длин рычага и массы маятника при различных периодах движения рабочего стола.
Массы грузов имеют следующие значения:  кг,
кг,  кг. Длины звеньев (см. рис. 1):
кг. Длины звеньев (см. рис. 1):  м,
м,  м,
м,  м,
м,  м. Погонная масса рычагов
м. Погонная масса рычагов  кг/м.
кг/м.
Необходимо, меняя и подстроить собственную частоту под частоту вынужденных колебаний.
На рис. 2 представлены графики зависимости М(t) при угле раствора кривошипа  , периоде
, периоде  с, частоте
с, частоте  рад/с для ряда собственных частот.
рад/с для ряда собственных частот.
Рис. 2. Графики зависимости M(t)
Собственные частоты колебательной системы (см. рис. 2):
графику 1 соответствуют  м и
м и  кг, т.е. маятником является только шарнирный параллелограмм, собственная частота при этом
кг, т.е. маятником является только шарнирный параллелограмм, собственная частота при этом
 рад/с;
рад/с;
графику 2 соответствуют  м и
м и  кг, частота собственных колебаний
кг, частота собственных колебаний  рад/с подстроена под частоту вынужденных колебаний (
рад/с подстроена под частоту вынужденных колебаний (  );
);
графику 3 соответствуют  м и
м и  кг, частота собственных колебаний
кг, частота собственных колебаний  рад/с (
рад/с (  );
);
графику 4 соответствуют м и  кг, частота собственных колебаний
кг, частота собственных колебаний  рад/с,
рад/с,  .
.
Максимальный момент привода без маятника  Нм, тогда как при введении в конструкцию стенда маятника с определенными параметрами, максимальный момент может быть снижен до
Нм, тогда как при введении в конструкцию стенда маятника с определенными параметрами, максимальный момент может быть снижен до  Нм.
Нм.
На рис. 3 представлены графики зависимости максимального момента при угле раствора кривошипа  от частоты вынужденных колебаний.
от частоты вынужденных колебаний.
Графику 1 соответствуют значения м и кг, собственная частота минимальна, графику 2 – м и кг, частота собственных колебаний для графика 2 подстроена под частоту вынужденных колебаний ( ). Из графиков рис. 3 видно, что при маятниковая схема построения стенда выгодна только при  рад/с.
рад/с.

Рис. 3. Графики зависимости 
В таблице представлены параметры маятниковой схемы стенда (значения и ) для нескольких значений периода колебаний.
Исследования показали, что для исследования динамики маятниковых стендов можно использовать линейную математическую модель. Минимизация мощности приводов стендов линейных перемещений на основе шарнирно-рычажных механизмов достигается построением схемы подвеса рабочего стола в виде колебательной механической системы.
Дата добавления: 2020-10-14; просмотров: 1149;
Поиск по сайту
Узнать еще
- A. Узагальнені координати і узагальнені швидкості та прискорення
- API как средство интеграции приложений.
- C) Теорема затухания (Теорема смещения)
- C04 ППВ с комментариями и примерами
- Cбор государственных налогов с различных слоев населения
- Cыры, созревающие при участии слизи.
- F00 Деменция при болезни Альцгеймера
- F45.38 другие органы или системы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
