Колебательной системы
На рис. 2 обозначены:
1.  – соответственно жесткости амортизаторов 12, 13 (см. рис. 1) и упругой системы горизонтального привода. Коэффициенты неупругого сопротивления амортизаторов и упругой системы между активной и реактивной части системы горизонтального привод -
– соответственно жесткости амортизаторов 12, 13 (см. рис. 1) и упругой системы горизонтального привода. Коэффициенты неупругого сопротивления амортизаторов и упругой системы между активной и реактивной части системы горизонтального привод -  .
.
2.  – соответственно, жесткости амортизаторов 12, 13 (см. рис. 1) и упругой системы между активной и реактивной частями вертикального привода. Коэффициенты неупругого сопротивления амортизаторов и упругой системы между активной и реактивной частями системы вертикального привода -
– соответственно, жесткости амортизаторов 12, 13 (см. рис. 1) и упругой системы между активной и реактивной частями вертикального привода. Коэффициенты неупругого сопротивления амортизаторов и упругой системы между активной и реактивной частями системы вертикального привода -  .
.
3.  – амплитуды возмущающего момента горизонтальных колебаний и силы вертикальных колебаний, соответственно.
– амплитуды возмущающего момента горизонтальных колебаний и силы вертикальных колебаний, соответственно.
Принимая для системы горизонтальных колебаний в качестве обобщенных координат  и
и  угловые перемещения инерционных элементов
угловые перемещения инерционных элементов  и
и  , записывая выражения кинетической и потенциальной энергии, а также функции диссипации, дифференцируя их, и подставляя в уравнение Лагранжа 2-го рода, получим следующие дифференциальные уравнения движения систем
, записывая выражения кинетической и потенциальной энергии, а также функции диссипации, дифференцируя их, и подставляя в уравнение Лагранжа 2-го рода, получим следующие дифференциальные уравнения движения систем
 (1)
(1)
где  – угловая частота возбуждения колебаний.
– угловая частота возбуждения колебаний.
При наличии в линейных дифференциальных уравнениях членов с четными и нечетными производными решения следует искать через синусоидальные и косинусоидальные компоненты, иными словами, с двумя неизвестными компонентами (или через амплитудную величину и фазу перемещения)
 (2)
(2)
Получим систему алгебраических уравнений, из которой согласно [1] определитель системы раскрывается как сумма квадратов действительной и мнимой частей
 (3)
(3)
 (4)
(4)
Величины амплитуд колебаний масс и фазовых сдвигов по отношению к возмущающему моменту в соответствии с работой [1] определяются по следующим формулам:
 (5)
(5)

 (6)
(6)

 . (7)
. (7)
Из (4) мы разделим  ,
,  на
на  и обозначив
и обозначив


 ;
;  (8)
(8)
Имеем
Пренебрегая вследствие малости произведением  и обозначая
и обозначая
 ;
;  (9)
(9)
имеем
 (10)
(10)
Из (10), (5), (6), (7) перепишем
 (11)
(11)
 (12)
(12)
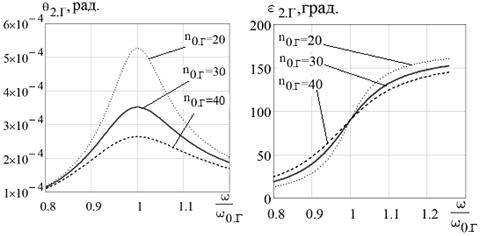
Используя (11), (12) и задавая примерные параметры системы строим графики зависимостей амплитуды и угла сдвига фаз активной массы от соотношения частот на рис. 3.
Аналогично, для вертикальных колебаний, применяя тот же метод [1] получаем выражения амплитуд
 (13)
(13)
и угла сдвига фаз
 (14)
(14)
Мы считаем жесткость механической конструкции (рычаги 10, 14; вал 11, см. рис. 1) бесконечной, поэтому вертикальная суммарная жест-
кость

где с9 - жесткость центральной пружины 9.
А б
Рис. 3. Графики зависимости амплитуды (а) и угла сдвига фаз (б)
Дата добавления: 2020-10-14; просмотров: 719;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
