Расчетная модель конструкции с сосредоточенными и распределенными параметрами.
 - жесткость и коэффициент демпфирования амортизаторов в главном геометрическом направлении;
- жесткость и коэффициент демпфирования амортизаторов в главном геометрическом направлении;
 - масса корпуса ЭВМ и всех жесткосвязанных с ним элементов;
- масса корпуса ЭВМ и всех жесткосвязанных с ним элементов;
 - суммарная масса плат.
- суммарная масса плат.
Разобьем модель на два участка: плата с опорным контуром – упругая система; твердое тело с нежесткой механической связью ( ) – одномассовая система. Рассмотрим отдельно эти участки. Движение платы будет совершаться под действием кинематической возмущения за счет движения ее опорного контура по закону  и силы
и силы  (приведенная реакция системы), а движение твердого тела – по закону
(приведенная реакция системы), а движение твердого тела – по закону  и силы .
и силы .
Представим относительное перемещение платы в виде ряда по формам ее главных колебаний:  , тогда
, тогда  , где - переносное движение упругой системы как твердого тела вместе с ее опорным контуром;
, где - переносное движение упругой системы как твердого тела вместе с ее опорным контуром;  - перемещение точки упругой системы в i-м главном колебании относительно ее недеформированного состояния;
- перемещение точки упругой системы в i-м главном колебании относительно ее недеформированного состояния;  - форма i-го главного колебания упругого тела (нормальная функция).
- форма i-го главного колебания упругого тела (нормальная функция).
Основное положение – главное колебание упругого тела может совершаться независимо от других его колебаний. Следствие – движение системы в каждом главном направлении можно рассматривать отдельно. Для i-го главного колебания упругой системы:
 где
где
 приведенная масса упругой системы в i-м главном колебании;
приведенная масса упругой системы в i-м главном колебании;
 приведенная масса упругой системы при ее переносном движении по закону ;
приведенная масса упругой системы при ее переносном движении по закону ;
 приведенный коэффициент жесткости;
приведенный коэффициент жесткости;
 приведенный коэффициент демпфирования.
приведенный коэффициент демпфирования.
Здесь mэ– масса элементарной площадки упругого тела (платы); S = (z, y); wi– частота главного колебания; ei– логарифмический декремент затухания i-го главного колебания, деленный на 2p. Теперь уравнение движения упругой системы (пакета плат) в i-м главном колебании будет (а):
 Реакция упругой системы (платы) на основание
Реакция упругой системы (платы) на основание 
Тогда дифференциальное уравнение движения одномассовой системы будет (б):
 .
.
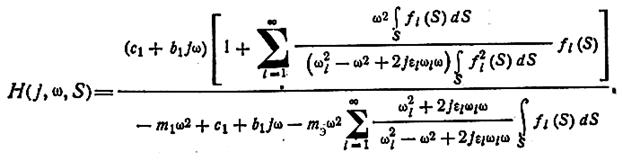
Решая систему (а) и (б) получаем частотную характеристику:
Дата добавления: 2016-07-18; просмотров: 1867;
Поиск по сайту
Узнать еще
- Yandex_direct_print() Подоблицовочные конструкции для вентилируемых фасадов
- Автоматна модель шифратору
- АВТОМОБИЛЬ И СОВРЕМЕННОЕ ОБЩЕСТВО. ТРЕБОВАНИЯ К КОНСТРУКЦИИ. ЗАКОНОДАТЕЛЬНЫЕ ОГРАНИЧЕНИЯ
- Автомодельного ламинарного течения жидкости в трубе с использованием системы дифференциальных уравнений, описывающих течение жидкости в трубе
- Адаптационная модель К. Рой
- Аддитивная цветовая модель
- АНАЛИЗ СОВОКУПНОГО СПРОСА И СОВОКУПНОГО ПРЕДЛОЖЕНИЯ. МОДЕЛЬ «AD-AS»
- Аналитическая модель решения задачи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
