Понятие статической устойчивости.
Динамика электропривода имеет важное значение при исследование условий устойчивости электрического привода при нарушении его установившегося значения. При исследовании устойчивости электрических приводов целесообразно разграничить два вида нарушения устойчивости:
а) Когда изменение установившегося режима протекает медленно и роль инерционных масс или индуктивности не значительно.
б) Когда это изменение происходит быстро и нельзя пренебречь влиянием инерционных масс или индуктивностью.
Исследование устойчивости в первом случае относится к области статической устойчивости или саморегулирования, а во втором случае к области динамической устойчивости.
Рассмотрим некоторые вопросы статической устойчивости электрического привода.
Привод находится в равновесии, если при определенной скорости его вращения момент (Мд) равен моменту сопротивления (Мс) рабочей машины Мд=Мс – это равновесие может быть устойчивым, неустойчивым и безразличным.
При устойчивом равновесии под воздействием внешнего фактора (внезапного) нарушившего равновесие, привод вновь возвращается к устойчивому состоянию.
При неустойчивым равновесии скорость привода начинает расти или уменьшаться до полной остановки привода. На границе между устойчивым и неустойчивым равновесием находится безразличное равновесии, при котором привод независимо от нарушения его установившегося равновесия сохраняет свое устойчивое состояния при различных скоростях, но при небольшом диапазоне.
Под статической устойчивостью электрического привода понимается способность его автоматически восстанавливать установившейся режим работы, при его нарушении без помощи регуляторов за счет свойств электрического привода обусловленных механическим характеристикам двигателя и рабочей машины. Статическая устойчивость свойственна не всякому электрическому приводу, поэтому для определения статической устойчивости пользуются критерием статической устойчивости.
2. Критерий статической устойчивости.
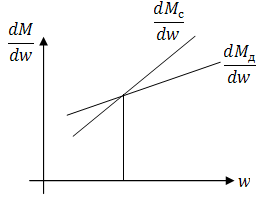
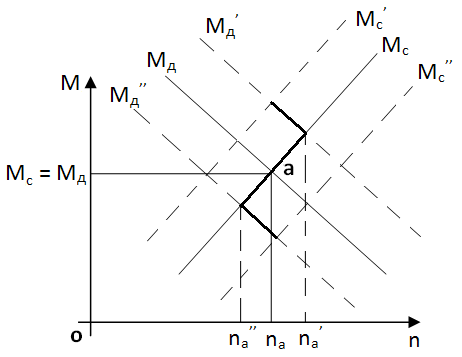 Пусть механическая характеристика двигателя и рабочей машины заданы зависимостями Мд=f1(n); Мс=f2(n), которые могут не имеет аналитических выражений и быть заданы в виде кривых. Точка пересечения кривых т.а определяет состояние равновесия для которой Мд=Мс, а скорость соответствует некоторому значению na.
Пусть механическая характеристика двигателя и рабочей машины заданы зависимостями Мд=f1(n); Мс=f2(n), которые могут не имеет аналитических выражений и быть заданы в виде кривых. Точка пересечения кривых т.а определяет состояние равновесия для которой Мд=Мс, а скорость соответствует некоторому значению na.
Пусть по каким либо причинам механическая характеристика изменилась и заняла положение Мд’ отличное от Мд, если статический момент (Мс) не изменился, то за счет разности 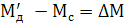 , где
, где  – избыточный момент, произойдет изменение скорости до значения Мс’ при котором Мс и Мд’ сравняются. Привод достигнет своего нового равновесия. В сторону изменения Мд’’ процесс аналогичен.
– избыточный момент, произойдет изменение скорости до значения Мс’ при котором Мс и Мд’ сравняются. Привод достигнет своего нового равновесия. В сторону изменения Мд’’ процесс аналогичен.
Если кривые движущего момента Мд и Мс поменять местами, то привод становится неустойчивым.
Пусть уравнение движения имеет вид

где М = Мс – Мпр – Мэм
Мпр – внешний момент приложенный к валу электрического двигателя. Например от механического двигателя или за счет запаса кинетической энергии, такой момент на всегда существует и определяется конкретными условиями. Будем считать Мпр=0.
Мэм – электромеханический момент развиваемый двигателем.
Мс – момент нагрузки или статическое сопротивление, которое учитывает статическое трение и все составляющие моменты нагрузки, не зависящие от скорости.
В установившемся режиме w0=const, значит

На практике М может быть функцией скорости заданной аналитически или графически. В этом случае выражение (41) справедливо для малых отклонений  и от устойчивого состояния определяемого w0=const.
и от устойчивого состояния определяемого w0=const.
Функцию  разложив в ряд Тейлора, при аналитическом задании и в окрестностях точки w0 и ограничившись производной первого порядка.
разложив в ряд Тейлора, при аналитическом задании и в окрестностях точки w0 и ограничившись производной первого порядка.

т.к  , то
, то 
 – определено в точке
– определено в точке 
С учетом (43) выражение (41) представляет линейное дифференциальное уравнение первого порядка относительно , решением которого является выражение вида :

 – постоянная интегрирования.
– постоянная интегрирования.
При  это означает, что привод возвращается к своему установившемуся состоянию
это означает, что привод возвращается к своему установившемуся состоянию  означает, что
означает, что

Если  то
то  или
или

Выражение (46) и есть критерий статической устойчивости привода, при w =w0, т.е. для того, чтобы электрический привод с моментом нагрузки Мс=Мд при w =w0 обладал статической устойчивостью необходимо, чтобы в данной точке (при w =w0) производная момента нагрузки по скорости была больше произведения момента приводного двигателя по скорости.
Если же показатель степени выражения (44) больше нуля, то привод не обладает статической устойчивостью и растет, при 
Если же показатель степени выражения (44) равен нулю, т.е  то критерий недостаточен ля выявления устойчивости привода.
то критерий недостаточен ля выявления устойчивости привода.
Другими словами для устойчивости привода необходимо, чтобы механическая характеристика двигателя в точке wo имела отрицательную производную  , была убывающей по скорости, но основным критерием служит выражение (46). Устойчивость привода возможна и при положительных производных но удовлетворяющих выражению (46).
, была убывающей по скорости, но основным критерием служит выражение (46). Устойчивость привода возможна и при положительных производных но удовлетворяющих выражению (46).
Дата добавления: 2019-02-08; просмотров: 1208;
Поиск по сайту
Узнать еще
- B.I. Понятие культуры
- I. Понятие о методах воспитания.
- I. Понятие о принципах обучения, их взаимосвязь.
- II. Общее понятие о процессе познания и процессе обучения.
- III.IX. Понятие о стратиграфических и петрографических горизонтах
- IV. Понятие “стохастические и нестохастические” эффекты облучения
- IV.4. Понятие устойчивого развития
- R-плазмиды, функции, строение. Пути передачи. Механизм множественной лекарственной устойчивости.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
