Выбор оптимального передаточного числа редуктора.
Одним из режимов работы электроприводов является режим типа разгон-торможение с последующей паузой (треугольного вида).
ω
пуск торможение
t



s w:ascii="Cambria Math" w:fareast="Times New Roman" w:h-ansi="Cambria Math"/><wx:font wx:val="Cambria Math"/><w:i/><w:sz w:val="28"/><w:sz-cs w:val="28"/></w:rPr><m:t>время разгона</m:t></m:r></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>"> 


Таким режимами характеризуется приводы, с короткими циклами работы. Более общим является режим характеризующий трапециевидной формы закона движения имеющий участок разгона (пуска) участок стабильной скорости движения и участок торможения. Циклы работы привода могут повторится через определенное время – время паузы. Направление движения может меняться в реверсивных приводах, время разгона и торможения соответствуют динамическим режимам работы привода в которых обеспечивается необходимые ускорения движущихся частей при вращательном движении ускорения соответствует первой производной от угловой скорости при линейном 
Динамические режимы привода обеспечивают приводными приводами и конструкцией электрического привода включая или не включая различные промежуточные преобразователи, наиболее часто применяются уже встречавшиеся схемы передачи с редуктором
| η, i |

|

|




Во многих случаях работы электрического привода требуется обеспечить минимальное время разгона рабочего или выходного вала и обеспечить минимальное время торможения  min,
min,  min. Это может быть выбором оптимального передаточного числа редуктора
min. Это может быть выбором оптимального передаточного числа редуктора

Будем считать заданные величины моментов инерции на рабочем валу  ,
,  ,
,  и считаем эти величины постоянными не зависящие от скорости вращения. Эти допущения соответствуют практически для всех двигателей постоянного и переменного тока с реостатным пуском и двойной беличьей клеткой.
и считаем эти величины постоянными не зависящие от скорости вращения. Эти допущения соответствуют практически для всех двигателей постоянного и переменного тока с реостатным пуском и двойной беличьей клеткой.
Для выбора оптимального числа редукторов  положим
положим 
При заданной скорости рабочего вала выбирают двигатель той или иной мощности  Если выбрать так, то определяется передаточное число
Если выбрать так, то определяется передаточное число  подбором таким образом редуктора влияет на условие пуска двигателя, если увеличить передаточное число это приведет к увеличению движущего момента на рабочем валу,что приводит к увеличению момента инерции двигателя
подбором таким образом редуктора влияет на условие пуска двигателя, если увеличить передаточное число это приведет к увеличению движущего момента на рабочем валу,что приводит к увеличению момента инерции двигателя
i 


Оптимально передаточное отношение обеспечивает min время пуска или иногда вместо условий для минимального времени пуска можно использовать условия для максимального начального ускорения рабочего вала.

Уравнения движения для рабочего вала
 (11)
(11)
Ускорение  (12)
(12)
Т.к. находится оптимальное передаточное отношение то переменной является i при котором достигается max  или
или  найдя производные правой части по i и прировняв ее к 0, можно записать, что
найдя производные правой части по i и прировняв ее к 0, можно записать, что
 (13)
(13)
Обозначив через m =  ; j=
; j= 
 (14)
(14)
Для нахождения оптимального передаточного отношения обеспечивающего минимальное время торможения можно воспользоваться таким выражением, но отличающимся знаком
 (15)
(15)
Для приводов с коротким циклами работы с треугольным графиком (тахограммы) при условии, что моменты двигателя при разгоне и торможении одинаковы и равны  суммарное время разгона и торможения определяется
суммарное время разгона и торможения определяется
 (16)
(16)
Из выражения можно найти
 (17)
(17)
В более простом виде приближенно можно записать  для треугольной тахограммы
для треугольной тахограммы


Если известно время разгона и время торможения, можно воспользоваться выражения вида
 (18)
(18)
Для электрических приводов с относительно небольшим статическим моментом (  с преобладающим инерционными массами может воспользоваться приближенными формулами
с преобладающим инерционными массами может воспользоваться приближенными формулами
 (19)
(19)
При оптимальном передаточным отношении инерционной массы ведущего и ведомого валов становиться равным т.е.
 *
*  =
= 
 , если
, если 

То есть запасы кинетической энергии на рабочем валу равна запасу кинетической на роторе двигателя
Если Mc стремится к нулю из (12)
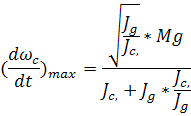
 = f*(
= f*(  (20)
(20)
Или  (21)
(21)
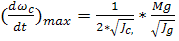
В источниках показано, что максимальным ускорением на выходном валу имеет одинаковое выражение, как для частного случая (  = 0) так и общего когда (
= 0) так и общего когда ( 
Кроме того показано, что при заданных величинах и  , максимальное ускорение на выходном валу зависит исключительно от величины
, максимальное ускорение на выходном валу зависит исключительно от величины  т.е. только от отношения номинального момента выбранного двигателя к корню квадратному из момента инерции (махового момента) ротора. Это позволяет при сравнении двигателя выбрать такой который обеспечивает номинальное ускорение. В практики проектирования электрических приводов с преобладающим динамическим режимом работы иногда пользуются так называемой динамической характеристикой или динамический коэффициент качества электрических двигателей под которым понимается отношение
т.е. только от отношения номинального момента выбранного двигателя к корню квадратному из момента инерции (махового момента) ротора. Это позволяет при сравнении двигателя выбрать такой который обеспечивает номинальное ускорение. В практики проектирования электрических приводов с преобладающим динамическим режимом работы иногда пользуются так называемой динамической характеристикой или динамический коэффициент качества электрических двигателей под которым понимается отношение
 – коэффициент качества
– коэффициент качества
Или представляет ни, что иное как собственное ускорение ротора двигателя. Если передаточное число подлежит выбору, то оптимальным условием обеспечивающим двигателю с наибольшей величиной отношения
§6. Деление механических характеристик по функциям.
 M
M


 ω
ω
1. рис. 2.рис.
M
ω
3.рис.
Двигатели в электрическом приводе по назначению делятся на:
1. если от двигателя требуется выполнять некоторое перемещение, как, например, в исполнительных двигателях автоматических устройств, то наиболее подходящим является линейно механическая характеристика рисунок 1
2. двигатели, предназначенные для совершения работы в электрических приводах могут иметь характеристику, при которой наибольший момент развивается приблизительно около точки по скорости близко к максимальной рисунок 2.
3. Двигатели, предназначенные для подъемной транспортировки механизмов должны развивать наибольший момент при пуске и иметь наибольший КПД при одной или двух избранных скоростях. Рисунок 3.
§7. Переходные процессы и устойчивость электрического привода.
Переходной процесс представляет собой явление в механических электрических и других системах возникающие в результате резких изменений внутри системы или внешних воздействий на нее для обозначения этих явлений в практике проявляют различные терминология имеющая одно и тоже значение.
Не установившейся или не стационарный процесс переходной или не установившейся режим.
Переходной процесс заключается в переходе от одного установившегося или равномерного режима или состояния системы к другому ее установившемуся состоянию, к ним относится пуск, торможение, реверсирование, изменение нагрузки и т.д. в связи с этим можно отметить три группы электрических приводов.
1. Приводы, в которых переходной процесс не имеет места или возникновение крайне редко ( редко пускаем в ход установки длительный режим работы пример: электрический привод центробежных насосов, конвейерных механизмов).
2. Приводы с частными или преобладающими переходными процессами, это электрические приводы с частыми пусками либо реверсами.
3. Электрические приводы с практически непрерывными переходными процессами, это электрический привод с челночными механизмами.
Характер протекания и продолжительность переходных процессов определяется как его видом, так и особенностями самой системы. Количеством и природой содержащейся в ней инерционности которой характеризуется так называемыми постоянной времени различают, следующие типы постоянной времени.
Электромеханическую, электромагнитную, тепловую.
Название соответствующие видам представляющих их видом инерции.
В течении переходного процесса могут изменятся: скорость вращения валов, ускорение ,токи в цепях, напряжение и т.д.
Важным условием является устойчивость протекания переходных процессов, т.е.,чтобы к концу П.П. система приходила к новому состоянию равновесия.
Характеристики устойчивости переходных процессов могут иметь либо экспоненциальную форму кривой закона перехода системы из одного состояния в другое, либо в затухающие гармонические колебания.
X
t
1.
t
2.
x
t
3.
Переходные процессы описываются дифференциальными уравнениями. Расчет переходных процессов по линейным дифференциальным уравнениям может быть осуществляем аналитически и наиболее приемлем; для расчета сложных переходных процессов может приемлем принцип суперпозиции т.е. общий переходной процесс может быть представлен суммой от каждого воздействия систем.
Переходные процессы могут протекать по различным законам
Переходной процесс может рассчитываться начиная с любого момента времени t=0, принимаемого за начальный момент, если известны начальные энергетические условия системы в этот момент. Основной характеристикой линейной системы в отношение переходного процесса является переходная функция которая описывает процессы в системе при воздействии на ее входе единичного скачка входной величины, от 0 до некоторого значения принимаемого за единицы. Зная переходную функцию системы можно рассчитать переходной процесс в ней при произведении внешних воздействиях удобным аппаратом расчета переходных процессов является операционное исчисление продолжительность устойчивости переходных процессов составляет 4-5 единицы постоянных времени системы. Важное значение в переходных процессах имеет величина перерегулирования или величина превышения параметра регулирования над его установившемся значением в течении переходного процесса. Порядок дифференциального уравнения описывающего переходной процесс равен числу инерционных звеньев или постоянных времени звеньев входящих в систему. Между переходным процессом двигателях постоянного тока и двигателях переменного тока существуют некоторые различия. У асинхронных двигателей подавляющем большинстве электромагнитный переходной процесс затухает быстрее по сравнению с электромеханическим переходным процессом для таких систем достаточно рассмотреть только последний процесс, описывающийся одним дифференциальным уравнением движения или механическим равновесием системы. У двигателей постоянного тока рассматриваются оба процесса, поэтому необходимо решать два уравнения: уравнение механического и электрического равновесия, результатом решения задачи переходного процесса могут быть зависимости в виде аналитических функций n=f(t); M=f(t); I=f(t).
§8. Постоянные времени в переходных процессах электрического привода.
Системы с линейными характеристиками переходных процессов описываются линейными дифференциальными уравнениями, если это уравнение первого порядка, то его решение выражает протекание переходных процессов по экспоненциальному закону
>  )*
)*  (22)
(22)
Значение функции при начальных условиях и в установившемся режиме. При нулевых начальных условиях  и при отношении
и при отношении
 (23)
(23)
τ – безразмерная величина
скорость процесса при различных τ
Таблица 1

| 
| |||||
| y | 0.632 | 0.865 | 0.95 | 0.982 | 0.99 | λ |
У T
 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
0,632
t
скорость процесса при различных τ может быть представлена в таблице 1 из которой следует, что теоретический процесс установления заканчивается через бесконечно большое время, но , при t = 3T переменная величина достигает 95% своего установившегося значения следовательно для упрощения расчетов, можно ограничится величинами τ = 3T, ошибка не превышает 5%.
При изучении переходных процессов различают следующие постоянные времени.
1. Электромагнитная постоянная времени – характеризующая инерцию
ненасыщенной магнитной цепи и выражающаяся величиной.
 (с) (24)
(с) (24)
L – коэффициент самоиндукции (Гн) R – сопротивление (Ом)
Величина  для простых цепей с индуктивностью с сопротивлением включенного на постоянное напряжение U с дифференциальным уравнением вида
для простых цепей с индуктивностью с сопротивлением включенного на постоянное напряжение U с дифференциальным уравнением вида
 (25)
(25)
Определяется скорость нарастания тока в цепи до  по закону
по закону
 (26)
(26)
Для проводов с двигателями постоянного тока электромагнитной постоянной времени связывается с цепью якоря по которой происходит управление двигателем обозначаемой как 

 - индуктивные обмотки якоря.
- индуктивные обмотки якоря.
Для двигателей постоянного тока для расчета индуктивности якоря пользуются полуимперической формулой Уманского – Линвилля
 (Гн) (27)
(Гн) (27)
p – число пар полюсов
 - номинальное число оборотов в минуту
- номинальное число оборотов в минуту
k - коэффициент определенный экспериментально
k = 0,6 для машин без компенсационной обмотки
k = 0,25 для машин с компенсационной обмоткой
Иногда для расчетов пользуются упрощенной формулой для .
 (28)
(28)
 – относительное падение напряжения на обмотке якоря (29)
– относительное падение напряжения на обмотке якоря (29)
 = 5,7 для машин без компенсационной обмотки
= 5,7 для машин без компенсационной обмотки
=2,4 для машин с компенсационной обмоткой
 значение можно распределить следующем образом = 5 – 11% при мощности меньше или равных
значение можно распределить следующем образом = 5 – 11% при мощности меньше или равных  19 кВт
19 кВт
= 4 – 6% при P = 10 – 100 кВт
= 3 – 5% при P  100 кВт
100 кВт
Для двигателей постоянного тока следует отметить, что постоянная времени обмотки возбуждения  во много раз превосходит постоянную времени и считают, для компенсированных машин
во много раз превосходит постоянную времени и считают, для компенсированных машин 
 для некомпенсированных
для некомпенсированных 
Для ненасыщенных магнитных цепей величина не является величиной постоянной и должна рассчитываться для каждой точки кривой намагничивания. С увеличением насыщения значения L уменьшается и в зависимости от  , может быть записана в виде.
, может быть записана в виде.
 (с) (30)
(с) (30)
 - число витков обмотки возбуждения
- число витков обмотки возбуждения
 - ток в обмотке
- ток в обмотке
При изменении тока возбуждения от  до
до  поток возбуждения изменяется от
поток возбуждения изменяется от  до
до  можно пользоваться средним значением
можно пользоваться средним значением 
 (31)
(31)
Есть тангенс угла наклона касательной в той или иной точке характеризуется кривой намагничивания
 (32)
(32)
2. Электромеханическая постоянная времени – характеризует линейную инерцию системы и имеет вид
 (33)
(33)

 - маховой момент
- маховой момент  ) всех взаимных частей
) всех взаимных частей
J – момент инерции  )
)
- номинальное скольжение
В практике электрических приводов встречается постоянная времени пуска аналогичная времени  и определяется следующем выражением.
и определяется следующем выражением.
 (34)
(34)
 , J - момент индукции
, J - момент индукции
Для нахождения значения  (постоянной или пусковой) достаточно написать уравнение движения для двигателя с находящимся на его валу маховыми массами при статическом моменте
(постоянной или пусковой) достаточно написать уравнение движения для двигателя с находящимся на его валу маховыми массами при статическом моменте  разогнавшемуся или разгоняющемуся до скорости
разогнавшемуся или разгоняющемуся до скорости  под действием постоянного момента равного номинальному моменту двигателя
под действием постоянного момента равного номинальному моменту двигателя
 (35)
(35)
Т.е. электромеханическая постоянная пуска представляет собой время в течении которого ненагруженный двигатель из неподвижного состояния может достигнуть полной скорости под действием своего номинального момента. Величину можно определить как для случая когда нагрузочный момент является линейной функцией скорости или когда r wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">  не линейны, но могут быть линеаризованы вблизи рабочей точки
не линейны, но могут быть линеаризованы вблизи рабочей точки  и
и  тогда если уравнение движения представлено в виде
тогда если уравнение движения представлено в виде
 если
если  , где
, где
a – коэффициентпропорциональности между приращением скорости ∆ω и приращением избыточного момента ∆(  )
)
– установившееся значение скорости привода, определяемое точкой пересечения прямых  и
и  т.е.
т.е.
M 
0 ω
Коэффициент  , при ∆ω → 0
, при ∆ω → 0  и
и  , →
, →
При интегрировании от  до
до  , при условии, что
, при условии, что  получим
получим
 безразмерная величина, а называется обобщенной электромеханической постоянной времени
безразмерная величина, а называется обобщенной электромеханической постоянной времени
 (с) если или
(с) если или  , то
, то  – определенное время пуска
– определенное время пуска
3.Постоянная времени нагрева двигателя
Характеризует его тепловую инерцию
 ,
,
с – теплоемкость
A – теплоотдача машин
Тепловой режим работы электрических двигателей определяемый соотношениями между продолжительностью работы и продолжительность паузы. При работе двигателей под нагрузкой в нем возникает потери электрической энергии выделяющаяся в виде тепла и создающий нагрев двигателя. Рассмотрим двигатель как однородное тело с единой постоянной времени нагрева, можно использовать упрощенную методику теплообмена двигателя с окружающая средой, пусть потери энергии в двигатели за единицу времени равной Q, то количество тепла выделяющегося в двигателе за время dt расходуется на обмен с окружающее средой с поверхности S на повышение температуры τ на величину dτ.
Этот процесс выражается дифференциальном
 (36)
(36)
G – масса двигателей ; с – удельная теплоемкость ; λ – коэффициент теплоотдачи
Интегрируем выражение (36)
 (37)
(37)
 - полная теплоотдача
- полная теплоотдача
 - начальная температура двигателя
- начальная температура двигателя

Величина  и λ – величины постоянные, хотя в действительности они зависят от диапазона температур скорости вращения и некоторых других условий.
и λ – величины постоянные, хотя в действительности они зависят от диапазона температур скорости вращения и некоторых других условий.
Эти факторы нарушают линейность процесса нагрева двигателя, если принять время t→ ,
Кроме того можно записать
 (38)
(38)
Если  , то
, то  (39)
(39)
Как во всех линейных системах повышение температуры происходит по экспоненте
| t | T | 2T | 3T | 4T |
τ/ 
| 0.632 | 0.865 | 0.95 | 0.982 |
I
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - нагрев
α охл
За время t = T, 2T,3T,4T по графику определяется однозначно и двигателей достигает своей установившегося значения температуры за время равное (3 – 4)*T с момента включения с погрешностью 2  %
%
Для периода охлаждения приток тепла Q = 0 и выражение следует что:
Q = 0 и  (40)
(40)

Т.е. охлаждение двигателя тоже происходит по экспоненциальному закону
Постоянная времени нагрева и охлаждения двигателя можно характеризовать следующие величинами:
1 Электрический двигателей закрытого типа T = 3 часам
а) с самовентиляцией T = 1 ч
б) при остановки и отключении от сети T = 40 мин
для трансформаторов T = 4 ч
При испытаниях электрических машин на нагрев температура считает установившейся если ее повышение за один час не превосходит одного градуса Цельсия.
Дата добавления: 2019-02-08; просмотров: 1104;
Поиск по сайту
Узнать еще
- IV. Выбор способа ориентации изображения.
- IV. Выбор способа формирования фонда капитального ремонта
- Z-тест для сравнения выборочной доли со стандартом
- А) Понятие о комплексных числах
- АВТОМАТИЧЕСКИЙ ВЫБОР ШАГА ИНТЕГРИРОВАНИЯ
- Автоматический выбор шага. Правило Рунге
- Автоматическое регулирование числа оборотов двигателя
- Алгебраические структуры на целых числах.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
