Система обработки почвы с использованием GPS-технологий
11.2.1. Система параллельного вождения
Системы параллельного вождения и автопилотирования помогают точно соблюдать расстояния между проходами машин при выполнении полевых работ. При их использовании технологические операции выполняются с минимальными перекрытиями, экономится рабочее и машинное время, ГСМ, семена, удобрения и средства защиты растений. Также преимуществами систем параллельного вождения являются:
· Точность движения агрегатов по междурядьям
· Разгрузка водителя
· Возможность работы в темное время суток и в условиях плохой видимости
Определение местоположения производится через сигнал глобальной системы позиционирования (GPS, ГЛОНАС). Точность зависит от используемой технологии ДГСП (DGPS - дифференцированная глобальная система позиционирования) (рис. 41).

Рис. 41 Схема определения местоположения агрегата на поле
Системы параллельного вождения (рис. 42) подразделяются на:
· Курсоуказатели
· Системы подруливания
· Системы автопилотирования
 LH-Agro CenterLine LH-Agro CenterLine
|  Trimble Autopilot Trimble Autopilot
|  Claas OutbackS Claas OutbackS
|
Рис. 42 Системы параллельного вождения
Курсоуказатели показывают отклонение от требуемой траектории движения на светодиодной панели или на LED-экране. С их помощью водитель корректирует направление движения.
- Отображается требуемая траектория – водитель управляет машиной.
- Точность работ зависит от качества показа траектории и опыта водителя.
- Система быстро монтируется и переставляется в другие машины.
- Система является практичной при большой ширине захвата (разбрасывание удобрений по сенокосам и пастбищам).
- Низкая стоимость 1500 - 4500 EUR.
Системы подруливания подключаются к рулевому гидроцилиндру машины и активно включаются в управление. После заезда на заданную направляющую система самостоятельно ведет машину по траектории (рис. 43).
 Автоматическое управление лишь при начале движения по направляющей
Автоматическое управление лишь при начале движения по направляющей
· Точность в поле 5-30 см
·  Стоимость от 15 000 EUR (дополнительно включена стоимость корректирующего сигнала).
Стоимость от 15 000 EUR (дополнительно включена стоимость корректирующего сигнала).
· Значительная разгрузка тракториста.
· Зачастую S-образные и извилистые линии в начале пути.
· Хорошо подходят к длинным, без больших уклонов участкам (от 700 м) и большой ширине захвата машин.
Системы автопилотирования являются частью трактора и выполняют дополнительные функции. Управление агрегатом происходит, в основном, автоматически.
· Точность в поле 2-5 см
· Автоматическое управление также при разворотах агрегата
· Стоимость до 45 000 EUR
· Разгрузка тракториста также при разворотах
· Возможно выполнение всех работ, включая посев
· Возможна более полная интеграция с трактором
· Потеря концентрации при длинных загонках
В зависимости от оборудования возможны различные способы работы:
· Параллельное движение
· Обработка контура (движение по заданным траекториям)
· Междурядная обработка (параллельное движение на заданном расстоянии ширины захвата или междурядий) (рис. 44).
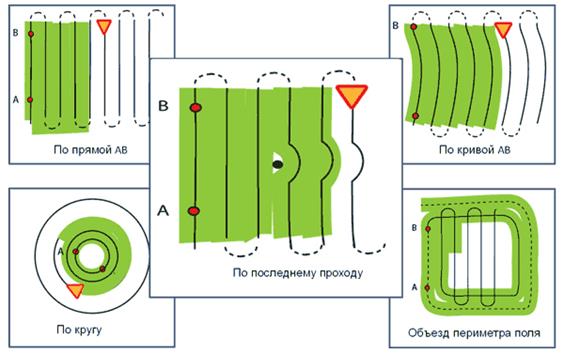
Рис. 44 Возможные схемы движения агрегата при использовании системы параллельного вождения
Возможность запоминать не только конечные и начальные точки ряда, но и любую кривую в качестве опорной линии позволяет реализовать самые разные варианты обработки.
Дата добавления: 2020-06-09; просмотров: 703;
Поиск по сайту
Узнать еще
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- DSM — система классификации Американской психиатрической ассоциации
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- II. НАЛОГОВАЯ СИСТЕМА В СОВРЕМЕННОЙ РОССИИ
- II. Научность, систематичность и последовательность обучения.
- VI. 1. ПЕРВИЧНОЕ ВЫЯВЛЕНИЕ ДЕТЕЙ С ОТКЛОНЕНИЯМИ В РАЗВИТИИ С ИСПОЛЬЗОВАНИЕМ ПЕДАГОГИЧЕСКОГО НАБЛЮДЕНИЯ
- Єдина державна система цивільної оборони населення та територій

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
