Общая структура программных средств для автоматизированного проектирования. Модель общей традиционной и нетрадиционной структуры (архитектуры). Геометрические объекты
Общая структура и принципы построения программных средств для автоматизированного проектирования технологических систем должны отвечать таким же требованиям, как и структура и принципы построения программных средств для моделирования технологических систем.
Как правило, общая структура и принципы построения программных средств для автоматизированного проектирования технологических систем схожи со структурой и принципами построения программных средств для моделирования (анализа). Различие обуславливается применением данных программных средств.
Специалистами отмечается, что в настоящее время происходит смена поколений САПР и переход к технологиям XXI века. Традиционная структура САПР, ядро которой образует геометрический процессор, уступает место гибкой архитектуре, основанной на активных объектах, имеющих при необходимости геометрическую и (или) графическую модель. Это позволяет осуществить гибкую интеграцию информационного обеспечения различных этапов жизненного цикла изделий, естественным образом организовать совмещенное проектирование, резко сократить сроки и стоимость разработки и адаптации систем.
Общая типовая структура (идеология) программных средств (комплексов) для автоматизированного проектирования технологических систем предполагает построение следующих функциональных подсистем и модулей:
· объемного геометрического (графического) моделирования:
o создания в диалоговом режиме объемных геометрических, параметрических моделей чертежей и их фрагментов без использования языка высокого уровня или макроязыка;
o построения перспектив;
o моделирования электронных радио элементов, интегральных микросхем, деталей типа тел вращения и призматических постоянной толщины, сборочных единиц из них;
o синтеза деталей и сборочных единиц из объемных примитивов с помощью булевых операций объединения, вычитания, пересечения;
o автоматический перенос видов, разрезов и сечений на формат чертежа и т. д.;
· автоматизации проектирования и моделирования (анализа) в реальном времени процессов исследования объемных моделей конструкций:
o извлечения необходимой информации из базы данных, содержащей унифицированные и стандартные схемы, символы и условные графические обозначения компонентов и их корпусов (каталогизированную номенклатуру);
o использование библиотек деталей, сборочных единиц, видов и т. д.;
o автоматического размещения элементов и трассировки соединений между элементами и компонентами на принципиальных схемах, печатных платах и микросборках;
o контроля правильности трассировки и электрической схемы, генерации перечня ошибок, проводов, кабелей, эквипотенциалов и т. д.;
o моделирования процессов функционирования исполнительных механизмов, расчета параметров конструкции, расчета конструкции на прочность и т. д.;
· подготовки управляющей информации для станков с ЧПУ, координатографов и фотоплоттеров:
o представления видов на выходном графопостроителе;
o экспорта / импорта файлов в форматах международного информационного обмена изображениями и чертежными графическими данными с разбиением чертежа на блоки / контуры для их последующей обработки на станках с ЧПУ и т. д.;
· выпуска конструкторско-технологической документации:
o формирования и редактирования конструкторско-чертежной документации по стандарту ЕСКД с автоматическим использованием единой системы допусков, посадок и спецификаций.
· математического моделирования и анализа (расчета) конструкций в области:
o термодинамики;
o механики;
o электромагнетизма и т. д.
Модель общей традиционной структуры (архитектуры) САПР. На рис. 1.2 представлена модель общей традиционной структуры (архитектуры) САПР технологических систем.
Рис. 1.2. Модель общей традиционной структуры (архитектуры) САПР технологических систем
Поясним модель общей традиционной структуры (архитектуры) САПР технологических систем. Для этого необходимо дать определение геометрической модели, данных и знаний.
Под математической и в том числе геометрической моделью понимают определенное множество абстрактных объектов или несколько множеств абстрактных объектов разной природы, различающихся условно приписываемыми им именами, в совокупности с заданной системой отношений между элементами этих множеств:
 ,
,
где M – математическая модель; A – носитель модели, Risi – i-е отношение модели (i = 1, ... , n).
Носителем модели является основное конечное или счетное множество A = {a1, ... , am}, на котором определены отношения Risi О Eisi. Множество {R1s1, ... , Rnsn} называется сигнатурой модели. При si = 2 имеем бинарные отношения (am, an) О R2, при si = 3 – тернарные (al, am, an) О R3, при si = n – N-арные (al, am, ... , an) О Rn.
В геометрических моделях носителями являются геометрические объекты: точки, линии, поверхности, твердые тела. Сигнатура геометрической модели строится на базе унарных, бинарных и N-арных операций над геометрическими объектами: преобразования, пересечения, сложения, вычитания, объединения и т. п. Мощность геометрического моделлера определяется номенклатурой объектов и операций, которые могут быть использованы в нем.
Модель общей структуры (архитектуры) САПР СПРУТ-технологии. СПРУТ-технология основана на использовании специализированного языка СПРУТ, предназначенного для построения специализированных САПР.
В соответствии с известной формулой
программа = данные + алгоритмы
программные средства состоят из пассивной компоненты, подлежащей обработке (данные), и активной обрабатывающей компоненты (алгоритмы). В широком смысле алгоритмы представляют собой знания. Знания могут быть представлены в процедурной форме на алгоритмических языках либо в непроцедурной форме как базы знаний. Алгоритмические языки наиболее эффективны для представления математических и в том числе геометрических знаний. Однако математические знания способны решать только некоторые проблемы в обширной области плохо формализуемых (экспертных) знаний. Экспертные знания представляются с помощью методов и средств искусственного интеллекта, к которым должны подключаться знания математические. Это символически изображено в виде модели общей структуры (архитектуры) САПР технологических систем СПРУТ-технологии, представленной на рис. 1.3, где в отличие от традиционной архитектуры, приложения строятся не с помощью языков типа С++ или Pascal, а на основе активных интеллектуальных объектов.
Рис. 1.3. Модель общей структуры (архитектуры) САПР технологических систем СПРУТ-технологии
Рассмотрим средства хранения геометрических данных в соответствии со СПРУТ-технологией. На рис. 1.2 и 1.3 показано, что сердцевиной любой архитектуры является база данных.
Геометрическая модель необходима для задания идеальной формы, которой должно было бы соответствовать изделие (рис. 1.4), а модель физического тела – дать характеристику материала, из которого изготавливается изделие, и допустимые отклонения реальных изделий от идеальной формы.
Рис. 1.4. Геометрическая модель шестерни
Результаты проектирования хранятся в базах данных. В связи со спецификой представления информации геометрические модели хранятся в геометрических базах данных, а негеометрические – в базах данных реляционного типа. При этом информация в обеих базах должна быть взаимосвязана. В связи с тем, что машиностроительные изделия представляют собой иерархическую систему объектов (сборочная единица, узел, деталь, элемент детали), в графической базе удобно использовать иерархическую модель данных. В СПРУТ-технологии графическая база содержит иерархию графических сегментов. Управление графическим данными осуществляется с помощью подсистемы DOG (создание новой базы, открытие существующей базы и просмотр текущей базы с выводом иерархической структуры и возможностью просмотра любого ее сегмента (над сегментами в свою очередь также выполняется ряд операций, таких как создание, копирование (в том числе с преобразованием (сдвигом, поворотом, масштабированием), изменение, вывод на текущее устройство графического вывода, очистка, просмотр, выбор, определение оболочки и удаление сегмента), импорт и экспорт чертежей, построение тексто-графических баз данных посредством оператора установления связи сегмента графической базы данных с таблицей реляционной базы и др.).
Рассмотрим геометрические знания и средства их представления и обработки. Геометрические знания могут быть представлены с помощью следующих средств:
· объектных библиотек на универсальных языках программирования С++, Pascal и т. п.;
· библиотек, написанных на специализированных геометрических языках;
· библиотек, сгенерированых в интерактивном режиме с помощью специальных средств геометрического моделирования.
Специализированные геометрические языки для описания конфигурации деталей возникли еще в 50-х годах в связи с проблемой автоматизации программирования обработки на станках с ЧПУ. Первыми отечественными языками такого типа были САП-2, разработанный в 1961 г. Б. Г. Таммом и Ю. И. Прууденом для геометрических описаний на плоскости, и САП-3, разработанный в 1966 г. для описания поверхностей. С тех пор десятки тысяч технологов-программистов с успехом применяли такие языки в своей повседневной деятельности вплоть до появления персональных компьютеров, позволивших использовать третий способ – интерактивную генерацию геометрических образов.
Последний метод позволяет предельно упростить формирование геометрических знаний посредством автоматической генерации языковых описаний по геометрическим построениям выполненным в интерактивном режиме.
СПРУТ-технология предусматривает использование двух последних способов, не исключая и первого из них.
Рассмотрим геометрические объекты СПРУТ-технологии.
Далее приведена классификация базовых геометрических объектов. По размерности параметрических моделей, необходимых для представления геометрических объектов, они делятся на нульмерные, одномерные, двухмерные и трехмерные. Нульмерные и одномерные классы геометрических объектов могут моделироваться как в двух координатах на плоскости (2D), так и в трех в пространстве (3D). Двухмерные и трехмерные объекты могут моделироваться только в пространстве.
Одним из важнейших геометрических объектов является контур – последовательность сегментов плоских геометрических элементов (отрезков прямых, дуг окружностей и сплайнов), начинающихся и заканчивающихся точками, лежащими на первом и последнем элементе соответственно. Точки используются как для задания начала и конца контура, так и в качестве опорных точек пересечения соседних элементов. При построении контуров могут быть использованы многогранники и спирали Архимеда.
Таким образом, основная цель моделирования на плоскости – формирование контуров.
Технологические и аналитические поверхности отличаются своим внутренним представлением. Технологические поверхности предназначаются для расчета управляющих программ и при необходимости могут быть преобразованы в аналитические. В аналитическую форму могут быть преобразованы и все другие поверхности. Это позволяет выполнять над множеством поверхностей различного типа операции объединения и отсечения, в том числе с сопряжением постоянного радиуса.
Унарные операции выполняются над одним геометрическим объектом. В их число входят преобразования, проекции и расчеты параметров. Оператор масштабирования контура может представлять собой операцию гомотетии из определенной точки с определенным коэффициентом пропорциональности. Остальные операции преобразований производятся с помощью специальных матриц, которые применяются к соответствующим объектам.
Возможность расчета моментов инерции области, ограниченной контуром, относительно координатных осей и относительно прямой из этого контура, моментов инерции твердого тела относительно пространственной прямой и точки в пространстве.
Центры масс могут быть определены для плоской области, ограниченной контуром, и для твердого тела.
Бинарные операции позволяют рассчитывать расстояния и углы между двумя объектами; пересечения двух линий, линии с поверхностью, двух поверхностей и двух тел.
С помощью операций вычитания и сложения можно из двух тел создать новое. Имеется возможность отсечения плоскостью части тела, а также объединения двух поверхностей с приоритетом по Z. Операция объединения может быть произведена над несколькими поверхностями.
Систему геометрического моделирования в СПРУТ-технологии обеспечивают подсистемы SIGI (интерактивное моделирование на плоскости), GM3 (моделирование в пространстве точек линий и поверхностей) и SGM (моделирование твердых тел и расчет их массо-инерционных характеристик), представляющие множество геометрических объектов и связей между ними.
В общем геометрические объекты подразделяются на следующие типы:
· 2D (плоские), к которым относятся следующие геометрические примитивы:
· точки;
· линии (прямые, окружности, сплайны, контуры, многогранники, эквидистанты, спирали Архимеда), над которыми можно производить операции преобразования, пересечения и объединения;
· 3D (объемные), к которым относятся следующие геометрические примитивы:
· точки;
· линии (прямые, кривые пространственные, кривые плоские пространственно-ориентированные, кривые на поверхности, кривые 2-го порядка);
· поверхности (плоскость, поверхности Куноя, плоскости с системой координат, поверхности кинематические, поверхности сплайновые, цилиндры, торы, конусы, полусферы, поверхности аналитические и поверхности технологические), над которыми можно производить операции отсечения и объединения;
· тела (сдвига, вращения, цилиндрические, конические, торические, сферические, цилиндрические, кинематические и твердые), над которыми можно производить операции вычитания, сложение и отсечения.
Аналитические поверхности необходимы для построения модели формы детали, а технологические для расчета траектории фрезерной обработки поверхностей. Технологические поверхности представляются в виде каркаса траекторий точки касания инструмента при их обработке. Твердые тела в системе SGM образуются из простых тел: цилиндра, конуса, сферы, тора, тел вращения и сдвига с помощью операций сложения, вычитания, пересечения, а также отсечения плоскостью.
Рассмотрим методы представления геометрических знаний в СПРУТ-технологии. В СПРУТ-технологии геометрические знания представляются в форме подпрограмм на геометрическом языке. Формальные переменные этих подпрограмм соответствуют размерной информации чертежа объекта, которая формируется в результате работы баз знаний, осуществляющих параметрический синтез. Геометрические знания представляются применительно к деталям определенного типа в виде параметризованных контуров. Размерная информация передается посредством множеств SET, в которые могут заноситься как числовые данные, так и геометрические объекты (точки, прямые, окружности, контуры). Эти множества выполняют роль глобальных переменных.
Подпрограммы построения поверхностных и твердотельных геометрических моделей инвариантны для каждого класса объектов, поскольку необходимые для их выполнения контуры передаются через множества. В СПРУТ-технологии имеются два способа создания геометрических подпрограмм: в обычном режиме написания и отладки программ с помощью "монитора" среды, посредством параметризации контуров из существующих геометрических баз данных, в том числе созданных с помощью средств, отличных от СПРУТ и использующих стандарт DXF, а также в режиме визуального геометрического программирования.
«Монитор» – главный компонент пакета СПРУТ. Он представляет собой среду для разработки, отладки и выполнения программ проектирования. В "мониторе" программа пишется, транслируется и выполняется одновременно. Удобство этого режима в том, что написание программы идет в режиме активного контроля – каждый введенный с клавиатуры оператор немедленно транслируется и выполняется (если трансляция прошла успешно). Таким образом, можно видеть результат работы каждого введенного оператора.
В случае обнаружения синтаксической ошибки выдается диагностическое сообщение с указанием номера и текста ошибки. Кроме этого воспроизводится последняя введенная строка, и курсор устанавливается на позицию ошибочного символа (при этом ошибочная строка не записывается в файл исходного текста).
Отладочная среда является мощным инструментальным средством для разработчика программ. Интегрированная отладочная среда включает в себя экранный редактор и большой набор функций, которые позволят транслировать программы и запускать их на выполнение, находить позиции ошибок, обнаруженных как в процессе трансляции, так и при выполнении программы, производить пошаговое выполнение программ с просмотром текущих значений переменных и полученных геометрических образов.
Параметризация существующих контуров выполняется с помощью подсистемы DiaCAD, в которой производится образмеривание с указанием переменных размеров и их базовых точек, а также автоматическая генерация программных модулей.
Визуальное геометрическое программирование подразумевает интерактивное построение геометрических образов с последующим автоматическим получением текста соответствующих программ. Применительно к плоским контурам эту функцию выполняет подсистема SIGI, построение и программирование моделей поверхностей производится в подсистеме SNC3, а твердых тел в SGM.
Принципы построения программных средств для автоматизированного проектирования. Способы описания поверхностей и построения геометрических моделей. Графические форматы данных. Требования, предъявляемые к системам автоматизированного проектирования. Тенденции развития методов автоматизированного проектирования
В программных средствах для автоматизированного проектирования технологических систем отсутствует необходимость в сложных расчетах и, поэтому отсутствует необходимость в построении сложного программного процессора для обработки входной информации как правило параметрической и графической. Его упрощенную альтернативу составляют процедуры, функции и дополнительные модули, обеспечивающие определенные расчеты и вспомогательные функции непосредственно в процессе построения геометрических (в том числе параметрических) моделей.
При построении программных средств для автоматизированного проектирования технологических систем необходимо учитывать тот факт, что при использовании нескольких САПР в рамках одного предприятия наиболее остро встает вопрос обмена данными между ними. Этот вопрос состоит из двух частей: передача данных из одной САПР в другую, и обратная передача информации. Поэтому в структуре должны быть предусмотрены процедуры или программные модули для экспорта и импорта данных из одной системы в другую.
Процесс создания САПР как общего назначения, так и специализированных (прикладных) можно разделить на несколько этапов:
· проектирование функциональной структуры и пользовательского интерфейса;
· проектирование информационной модели объекта проектирования;
· проектирование подсистемы документирования;
· введение в систему трудно формализуемых правил;
· объединение локальных рабочих мест в интегрированную систему проектирования.
Рассмотрим принципы, которыми необходимо руководствоваться при построении модулей, предназначенных для подготовки геометрической модели при автоматизированном проектировании технологических систем.
Известно, что изготовление детали должно начинаться с создания геометрической модели объекта в одной из систем САПР. В системе проектирования должна осуществляться предварительная отработка дизайна и конструкции объекта, используя методы машинного анализа, и исследоваться характеристики будущего изделия. Отработанная на уровне машинного анализа геометрическая модель должна быть готова для передачи на следующий этап процесса создания изделия – изготовление прототипа. При помощи специальной программы-транслятора поверхность модели может, например, аппроксимироваться треугольниками (триангулироваться). Полученное описание поверхности модели должно записываться в файл. Большинство систем САПР не совсем корректно создают триангуляцию объекта, поэтому необходимо проверить и, при необходимости, скорректировать полученное описание модели.
Системы САПР должны отличаться, прежде всего, методами создания и представления объекта и способами описания его геометрии.
Следует рассмотреть методы описания поверхностей объекта в САПР.
Основой современных САПР являются модули графического моделирования конструкций. В настоящее время для этих целей используются следующие методы описания: поточечное, неявными функциями и параметрическое.
Поточечное описание поверхностей заключается в представлении поверхности множеством отдельных точек, принадлежащих этой поверхности. Описываемый подход применяется на практике достаточно редко, что связано с трудоемкостью снятия данных об объекте, большими вычислительными затратами и значительным объемом исходных данных на описание объекта.
Описание неявными функциями поверхностей заключается в моделировании поверхностей следующей математической формой:  , где x, y, z – координаты объектного пространства. Неявная форма задания поверхности органично приспособлена для использования в методе твердотельного описания объектов и при методе трассировки лучей, т. к. существуют простые приемы определения взаимного положения точки и поверхности такого типа, определение точки пересечения прямой и поверхности.
, где x, y, z – координаты объектного пространства. Неявная форма задания поверхности органично приспособлена для использования в методе твердотельного описания объектов и при методе трассировки лучей, т. к. существуют простые приемы определения взаимного положения точки и поверхности такого типа, определение точки пересечения прямой и поверхности.
Параметрическое описание поверхностей. Поверхности задаются в форме  ,
,  ,
,  , где u, v – параметры, изменяющиеся в заданных пределах. Для одной пары значений u, v можно вычислить положение одной точки поверхности. Для полного представления обо всей поверхности необходимо с определенным шагом перебрать множество пар u, v из диапазона их изменений, вычисляя для каждой пары значение x, y, z в трехмерном пространстве. Основным преимуществом параметрического описания является возможность передачи геометрической формы очень сложных поверхностей, которые другими методами описать очень сложно. Другое преимущество параметрического описания заключается в приспособленности к физическим процессам управления инструментом в станках с ЧПУ.
, где u, v – параметры, изменяющиеся в заданных пределах. Для одной пары значений u, v можно вычислить положение одной точки поверхности. Для полного представления обо всей поверхности необходимо с определенным шагом перебрать множество пар u, v из диапазона их изменений, вычисляя для каждой пары значение x, y, z в трехмерном пространстве. Основным преимуществом параметрического описания является возможность передачи геометрической формы очень сложных поверхностей, которые другими методами описать очень сложно. Другое преимущество параметрического описания заключается в приспособленности к физическим процессам управления инструментом в станках с ЧПУ.
Способы построения геометрической модели. В системах проектирования наиболее часто используется три способа построения геометрической модели изделия: описание объекта телами, поверхностями и описания типа проволочной сетки. Основное различие состоит во внутреннем представлении объекта и в способе построения.
Описание типа проволочной сетки заключается в представлении поверхности объекта серией пересекающихся линий, принадлежащих поверхности объекта.
В поверхностном моделировании используется представление объекта набором тонких поверхностей, под которыми находится пустое пространство. При этом поверхность может быть сколь угодно сложной формы. Строятся поверхности, как правило, по кривым, описывающим их границы. Очевидным преимуществом поверхностного моделирования является возможность построения объекта любой сложности и конфигурации. Как правило, поверхностное моделирование используется в тех областях, где затруднено или невозможно применение твердотельного моделирования: дизайнерские проекты, моделирование обводов корпуса, создание объектов с нестандартными элементами (например, скругление с изменяемым радиусом, винтообразная улитка) и т. д.
В твердотельном моделировании для построения объекта используется три класса систем: с ячеечным представлением объекта (системы пространственного заполнения), моделирования сплошными геометрическими конструктивами и с представлением объекта его границами. Наиболее часто применяется моделирование конструктивами. При проектировании используются преимущественно стандартные геометрические тела (куб, цилиндр, тор и т. п.), над которыми осуществляются операции моделирования (объединить, вычесть, пересечь и т. п.). Результатом твердотельного моделирования может являться достаточно сложный геометрический объект. При этом подразумевается, что объекту принадлежат все точки – и на поверхности и внутри него. Внутренним представлением объекта в твердотельном моделировании является полная история создания данного объекта, т. е. древовидная структура типа «взять шар, вычесть из него конус, результат объединить с тором и т. д.». Это позволяет легко изменять объект и выполнять его параметризацию после окончания проектирования (хотя в большинстве систем эти функции работают очень ограниченно).
Потребности многих областей применения систем САПР полностью удовлетворяются возможностями твердотельного моделирования.
Практически все современные САПР должны иметь возможность работы и с твердотельным и поверхностным моделированием. Наиболее мощные системы проектирования работают на графических станциях (WS), но в последнее время видна тенденция к созданию версий продуктов и для персональных компьютеров типа РС. В настоящее время в мире лидирующие позиции занимают около 20 систем САПР. Перечислим некоторые из них (табл. 1.1):
Таблица 1.1
Системы САПР
| Система | Платформа | Фирма-производитель |
| AutoCAD | PC | AutoDesk (США) |
| ADEM | PC | Omega Technologies (Израиль) |
| CADDY | PC | Ziegler (Германия) |
| CADDS | PC, WS | PTC (США) |
| CATIA | WS | Dassault Systems (Франция) |
| CIMATRON | PC, WS | Cimatron (Израиль) |
| EUCLID | PC, WS | Matra Datavision (Франция) |
| I-DEAS | WS | SDRC (США) |
| Pro/ENGINEER | PC, WS | PTC (США) |
| Unigraphics | PC, WS | EDS (США) |
Графические форматы данных. После отработки конструкции модель может представляться, например, набором треугольников с вершинами, лежащими на поверхности модели. Таким образом, например, создается STL-файл. Данный формат предполагает описание поверхности объекта набором треугольников (рис. 1.5).
Рис. 1.5. Описание поверхности объекта набором треугольников
Качество поверхностей полученной модели зависит во многом от величины допуска. Как правило, для обеспечения хорошего качества достаточно величины допуска 0,1 мм.
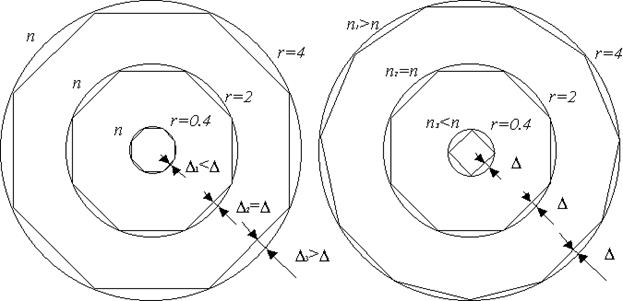
Важно заметить, что системы проектирования, использующие методы твердотельного моделирования, работают не с реальными объектами, а с их приближениями – CAD-аппроксимацией. Так, окружность во внутреннем представлении системы представляет собой правильный многоугольник, количество граней которого задается в параметрах системы проектирования (как правило, от 8 до 30). Так, например, при создании STL-файла, как правило, следует явно указать системе, что необходимо пересчитать в объекте. Многие системы выполняют эту сложную процедуру некорректно, что ведет к необходимости использования объекта без пересчета, и, как следствие, ухудшению не только качества, но и точности модели, что следует иметь в виду при построении системы проектирования и дальнейшем ее использовании совместно с другими системами. На рис. 1.6 показано различие аппроксимации внутреннего представления объекта в системе САПР и триангуляции на примере трех окружностей радиусами r, равными 0,4, 2 и 4 мм при допуске между исходным объектом и аппроксимацией  и числе граней для САПР n = 8.
и числе граней для САПР n = 8.
а) б)
Рис. 1.6. Триангуляция объекта: а) из внутреннего представления САПР; б) после пересчета
Из рисунка видно, что в аппроксимации системы проектирования допуск  между исходным объектом и его представлением различен и зависит от числа n – количества граней, при триангуляции постоянен при изменяющемся числе граней.
между исходным объектом и его представлением различен и зависит от числа n – количества граней, при триангуляции постоянен при изменяющемся числе граней.
В случае использования модели без пересчета, при триангуляции она не меняет своей геометрии, так как представляет собой набор прямых линий (плоскостей).
После пересчета модели, ее поверхность полностью повторяет поверхность исходного объекта. При триангуляции она аппроксимируется треугольниками в соответствии с заданным допуском.
В связи с вышесказанным, недопустимо использовать модель твердотельного моделирования без пересчета, если ее размеры таковы, что дельта аппроксимации САПР превышает допуск на точность изделия. И наоборот, при размерах элемента, близких к величине допуска, лучше использовать модель без пересчета.
Следует иметь в виду, что при увеличении допуска файл модели менее точно описывает реальную модель, однако количество треугольников и размер файла уменьшаются, соответственно уменьшается вероятность возникновения дополнительных ошибок при обработке файла. При уменьшении величины допуска триангуляция объекта более точна, однако увеличение количества треугольников и размера файла приводит к необходимости увеличения вычислительных мощностей и к возможному возникновению ошибок при обработке файла программами. Ошибки обработки возникают как при триангуляции модели в системе САПР, так и при корректировке файла. Необходимо выбрать разумный компромисс между точностью описания поверхности и величиной файла.
Требования, предъявляемые к системам автоматизированного проектирования. При построении САПР также важно уделять внимание автоматизации не только непосредственно проектирования на ЭВМ, но и автоматизации сопряженного с программным обеспечением оборудования посредством ЭВМ.
Одной из наиболее эффектных традиционных групп автоматизированного оборудования, которая широко используется при проектировании технологических систем и для изготовления разнообразных номенклатурных деталей всех отраслей радиотехники и машиностроения, является группа автоматов для создания печатных плат, сверлильных и токарных автоматов и полуавтоматов.
Рассмотрим принцип построения САПР ТП для трассировки, проектирования и создания печатных плат. В отличие от большинства систем данного класса, данная САПР ТП должна соответствовать следующим требованиям:
· являться интеллектуальной и содержать подсистему логического вывода, используемую при синтезе структуры ТП;
· иметь развитые графические средства и позволять визуализировать как саму печатную плату, так и ТП ее изготовления;
· представлять функционально-децентрализованную программно-аппаратную систему, реализованную на базе локальной вычислительной сети (ЛВС) Ethernet (Fast Ethernet). Преимуществами реализации САПР ТП в виде распределенной вычислительной системы (РВС) являются низкая стоимость обработки информации, использование объединенных ресурсов программного, периферийного и процессорного обеспечения, унифицированность интерфейсов и простота реконфигурации системы и надежность. Среди задач, возникающих при разработке распределенной САПР ТП, должны быть выделены следующие задачи:
o разработка функциональной структуры (ФС) САПР ТП;
o разбиение ФС на группы реализации, которые выполняются параллельно и независимо друг от друга;
o выбор адекватных коммуникационных структур и технических средств.
· обладать следующими функциональными возможностями:
o текстовое описание печатной платы на языке описания деталей (ЯОД) и редактирование текстового описания;
o синтаксический и семантический анализ текстового описания печатной платы;
o построение изображения печатной платы на экране монитора и вывод его на печатающее устройство;
o автоматический расчет технологической карты (ТК) в диалоге с пользователем;
o автоматический расчет ТК с использованием базы технологических знаний и экспертной системы;
o ручное заполнение и редактирование ТК с использованием специального редактора;
o расчет элементов печатного монтажа, трассировка межконтактных соединений (проводников), расстановка электро- и радиоэлементов (ЭРЭ) и интегральных микросхем (ИМС) и вывод результатов на экран монитора и печатающее устройство;
o форматная и неформатная печать чертежей и ТК на принтере;
o просмотр каталогов файлов описания печатной платы, ЭРЭ и ИМС и ТК;
o просмотр и редактирование справочных таблиц;
o редактирование изображений с использованием графического редактора;
o построение слайдов технологических переходов и показ слайд-фильмов;
o ручное описание сценария ТП токарной обработки на специальном языке графического моделирования (ГМ) в виде графической программы;
o автоматическое построение графической программы для сгенерированного системой логического вывода ТП;
o интерпретация графических программ и визуализация ТП обработки печатной платы на экране монитора.
Для описания всех уровней иерархии ФС можно использовать основной аппарат функционального подхода к проектированию информационно-вычислительных систем – диаграммы потоков данных специального вида. При разбиении диаграммных макроопределений высших уровней иерархии ФС на группы реализации должно учитываться следующее:
· степень связности функциональных модулей (ФМ) каждого макроопределения, определяемая на основе организации данных и внутрипрограммного интерфейса САПР ТП;
· частота использования отдельного ФМ или группы ФМ.
Все ФМ, относящиеся к одной группе, должны выполняться на отдельном узле РВС. Отметим, что формализация процесса разбинения ФС на группы реализации для конкретной САПР ТП может быть выполнена только на основе экспертных знаний.
Узлами структуры распределенной САПР ТП на базе ЛВС с шинной топологией являются:
· автоматизированные рабочие места технологов (АРМ-Т);
· серверы баз знаний;
· сервер печати;
· автоматизированные рабочие места конструкторов (АРМ-К);
· файловый сервер, интерпретаторы сетевых моделей (ИСМ).
На основе совокупности серверов баз знаний должна быть построена информационная среда проектирования, а также реализован распределенный логический вывод. ИСМ должны использоваться для организации сложных параллельных и конвейерных вычислений на основе принципа потока данных. Этот тип узлов используется в развитых версиях САПР ТП с большим объемом работ вычислительного характера. С технической стороны узлы распределенной САПР ТП должны быть представлены IBM PC-совместимыми ПЭВМ в конфигурации, соответствующей функциональному назначению узла. Так, например, сервер базы знаний по отношению к другим узлам должен иметь больший объем внешней памяти для хранения интенсиональных и экстенсиональных знаний и более высокое быстродействие, сервер печати должен комплексироваться устройствами вывода текстовой и графической информации, АРМ-К должен иметь развитую систему компьютерной графики. Файловый сервер должен реализоваться на базе мощного персонального компьютера семейства IBM PC и входить в состав штатных средств сети Novell.
Для построения ИСМ, а также реализации коммуникационных функций САПР ТП можно использовать библиотеку программ «Распределенная обработка-1 (РО-1)». Данная библиотека включает программы для установления и разъединения группового соединения, групповой передачи данных, управления распределенными данными, занятия
Дата добавления: 2020-05-20; просмотров: 859;
Поиск по сайту
Узнать еще
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- API как средство интеграции приложений.
- I тип реакций. Реакции, характерные для органических кислот.
- I. 5. Тесты для контроля знаний раздела I
- I. Государственный бюджет и его структура. три состояния государственного бюджета.
- I. Общая характеристика категории состояния как часть речи
- I. Определение и структура методов обучения.
- I. Социальная структура дореволюционной России

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
