Из истории создания двусредных аппаратов и их двигателей.
[По 1,2, материалам печати и интернет – изданий].
Разработка торпедного оружия была обусловлена тем, что в определенный момент броневая сталь, благодаря своей толщине и высокому качеству, стала трудно преодолимой для артиллерийского снаряда. В целях борьбы с броненосными кораблями требовалось новое оружие, способное доставлять к цели мощные боевые заряды. Таким оружием и стали самодвижущиеся мины, впоследствии названные торпедами. Начиная с 70-х гг. XIX века торпеды стали поступать на вооружение надводных кораблей, а в начале XX века — подводных лодок.
У первых торпед гребной винт приводился во вращение двигателем, работавшим от сжатого воздуха. Из-за отсутствия приборов управления движением торпед, точность попадания в цель была незначительной. Стрельбу можно было вести только с небольших дистанций. Это затрудняло применение нового оружия, так как атакующий, сблизившись с кораблем противника, неминуемо попадал под огонь его артиллерийских орудий.
Торпедное оружие непрерывно совершенствовалось. В конструкцию был введен парогазогенератор (ПГГ), в котором парогазовая смесь образовывалась путем сильного подогрева воздуха на пути к двигателю и впрыскивания в него пресной воды. (В современной терминологии – в результате сгорания керосино-воздушной смеси при высоких коэффициентах избытка окислителя.) Для подогрева использовался керосин. Такое техническое новшество значительно повысило экономичность двигателя. Увеличились скорость и дальность хода. Улучшилась управляемость по направлению и глубине. К началу первой мировой войны торпеды были признаны по значению вторым после артиллерии оружием и приняты на вооружение флотов почти всех вступивших в войну государств.
Понеся заметный урон от торпед, корабли вынуждены были менять характер маневрирования. Появилось много нового в тактике ведения морского боя. В то же время у торпед выявился такой существенный недостаток, как следность. Ее газообразный пенистый след на поверхности легко обнаруживался, что давало атакованному кораблю возможность уклониться от удара. Кроме того, след торпеды, выпущенной с подводной лодки, позволял противнику определить местоположение последней и контратаковать ее.
К началу второй мировой войны наряду с парогазовыми, стали применяться бесследные электрические торпеды с дальностью хода 5 км при скорости 30 уз, торпеды с акустической системой самонаведения и неконтактным взрывателем. Подводные лодки, вооруженные такими торпедами и оснащенные новейшими по тому времени техническими средствами (гидроакустическими и радиолокационными станциями, системой беспузырной стрельбы), стали важнейшим видом сил военно-морского флота. Большую роль в изменении характера борьбы на море сыграла торпедоносная авиация (корабельная и наземного базирования). Благодаря хорошим маневренным качествам и высокой скорости хода в широких масштабах использовались торпедные катера. Повышение мореходности и оснащение радиолокационными средствами позволили катерам применять свое оружие не только в прибрежных районах, и в открытом море.
Когда возможности развития классических схем торпед были практически исчерпаны, началось развитие ракетного и комбинированного ракетно-торпедного оружия.
Первоначально в нашей стране подобное оружие создавалось как симметричный ответ на зарубежные аналоги. Например, на баллистические ракеты класса “ПЛ-воздух-ПЛ” с атомным зарядом “Саброк” (США), крылатые ракеты класса “НК-воздух-ПЛ” с атомными зарядами и с боевыми частями в виде малогабаритных самонаводящихся торпед – “Асрок” (США), “Малафон” (Франция), “Икара” (Англия).
В 1968 г. научно-производственным коллективом под руководством лауреата Ленинской и Государственной премий Н.П. Мазурова была создана неуправляемая баллистическая ракета класса “НК-воздух-ПЛ” с ракетным двигателем на твердом топливе.
Следующим шагом стало принятие на вооружение ВМФ в 1969 г. твердотопливной баллистической автономно-управляемой ракеты класса “ПЛ-воздух-ПЛ”. Она создана коллективом, руководимым профессором, лауреатом Ленинской и Государственной премий Л.В. Люльевым, а ее инерциальные системы управления — коллективом, который возглавлял лауреат Ленинской и Государственной премий А.С. Абрамов.
В 1973 г., была создана первая отечественная телеуправляемая крылатая ракета класса “НК-воздух-ПЛ”, над которой работали коллективы под руководством лауреата Ленинской и Государственной премий Г.Н. Волгина.
При создании баллистических и крылатых противолодочных ракет зарубежные аналоги удалось превзойти по ряду параметров. Это увеличение дальности и точности стрельбы, применение в качестве боевой части малогабаритных самонаводящихся торпед и др. Был создан научно-технический задел для продолжающегося дальнейшего развития перспективных отечественных баллистических и крылатых ракет.
Параллельно во всех развитых странах шло развитие торпедного оружия. Это привело значительному увеличению дальности хода и усовершенствованию акустических головок самонаведения. Однако эти достижения в значительной степени обесценивались все возрастающей скоростью подводных лодок, в то время как скорость движения новых поколений торпед практически не могла быть увеличена в силу принципиальных физических ограничений движения тел в воде в режиме сплошного обтекания.
В 50-70-х годах в Советском Союзе впервые в мире создан принципиально новый вид оружия, не имевший до недавнего времени аналогов и прототипов за рубежом, – скоростные подводные кавитирующие ракеты. Его новизна заключается в движении под водой в режиме развитой кавитации (отрывного обтекания), когда основная часть корпуса ракеты охвачена парогазовой полостью – каверной. При этом резко снижается гидродинамическое сопротивление и достигается высокая скорость подводного движения ракеты, в 3-5 раз превышающая скорость обычных торпед, движущихся в режиме сплошного (безотрывного) обтекания.
В 1977 г. коллективом под руководством Е.Д. Ракова был создан первый боевой образец скоростной подводной кавитирующей ракеты “Шквал” класса “ПЛ-вода-ПЛ”, “ПЛ-вода-воздух-НК”. Общее руководство осуществляли министр СССР В.В. Бахирев и его заместитель Д.П. Медведев.
Глава 2. Основные понятия и Классификация пропульсивных комплексов двусредных аппаратов (ДА).
Пропульсивный комплекс ДА включает большой объем для аккумулирования энергии, механические средства для преобразования этой энергии во вращающий момент (для винтовых и водометных ДУ) либо устройства прямого преобразования, и движитель. Понятие «пропульсивный комплекс» используется для водного транспорта вместо «энергодвигательная установка».
По большому счету все пропульсивные двигатели – реактивные, т.к. создание тяги обеспечивается за счет реакции отбрасываемой с некоторым ускорением воды, либо рабочего тела, генерируемого в ПГГ. Сила тяги, в данном случае, есть реакция, испытываемая конструкцией двигателя в результате истечения из его ускоряющего устройства рабочего тела с большой скоростью. В литературе, касающейся водного транспорта, чаще используется термин «упор» как синоним тяги.
Существуют два типа ДДА:
– ракетные двигатели (РД), при работе которых происходит отбрасывание вещества, находящегося в самом перемещающемся аппарате;
– гидрореактивные двигатели (ГРД), в которых окружающая среда протекает через двигатель (движитель) и ускоряется для увеличения количества движения с помощью различных механических или тепловых устройств.
Гидрореактивные пропульсивные установки (ГРПУ), часто называемые гидрореактивными двигателями, являются энергетическими установками прямой реакции и сочетают в себе двигатель и движитель. Они были предложены раньше, чем винтовые, и чем их аналог в авиации – воздушно-реактивные двигатели. (В 1840 году известным изобретателем А. А. Саблуковым был практически испытан на шлюпке гидрореактивный двигатель. См. рис. 1.) Однако винт, оказавшийся достаточно простым, надежным и эффективным движителем в комплексе с турбинами и двигателями внутреннего сгорания до середины XX в. удовлетворял все «пропульсивные потребности» морского транспорта.
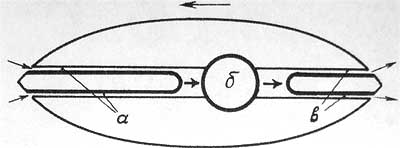
Рис. 1. Схема гидрореактивного двигателя 1840 года: а — всасывающие трубы, б — насос, в — выталкивающие трубы.
В соответствии с происхождением (природой) реактивных сил, приложенных к аппарату через корпус гидрореактивной установки, ГРПУ можно разбить на четыре группы [7]:
– электрические, или электростатические. В них ускорение заряженных частиц воды происходит под действием электрического поля, создаваемого разностью потенциалов, приложенных к электродам (к последним приложены и реактивные силы);
– электромагнитные. В них ускорение воды в виде электролита или плазмы происходит под действием сил ампера, обусловленных протеканием тока в магнитном поле. Реактивные силы приложены к устройствам, создающим и подводящим ток и магнитное поле к каналу установки, и складываются из электромагнитных и поверхностных сил;
– тепловые, или термодинамические. В них ускорение воды в парообразном или жидком состоянии (в частных случаях вместе с воздухом или другим транспортируемым термодинамическим рабочим телом) происходит под действием поверхностных сил, т. е. в термодинамическом процессе. Реактивные силы приложены к поверхностям конструкции установки, соприкасающимся с потоком;
– водометные, винтовые, лопастные. В них ускорение воды обеспечивается винтами различных конструкций.
Отдельно следует упомянуть установки, которые используют электроэнергию, запасенную в аккумуляторах, либо вырабатываемую в топливных элементах (электрохимических ячейках, электрохимических генераторах).
Электростатические установки к настоящему времени не получили развития. По принципу действия они аналогичны электрогидродинамическим генераторам и отличаются от них направлением силы по отношению к вектору скорости.
Электромагнитные гидрореактивные установки (рис. 2.) являются разновидностью магнитогидродинамических машин, поэтому их иногда называют МГД – движителями. Так же, как серийные электрические двигатели, их можно разделить по способу подвода электрической энергии к электродинамическому рабочему телу на кондукционные и индукционные, а по виду рабочего тела — на электролитические, плазменные и перистальтические с промежуточным жидкометаллическим рабочим телом. По конструктивному оформлению в настоящее время различают два характерных варианта электромагнитных ГРПУ: канальный и с открытым полем. Возможна более подробная классификация: например, по конструкции канала (линейный, цилиндрический, винтовой) или по режиму процесса (изобарический, с постоянной скоростью и т. д.).
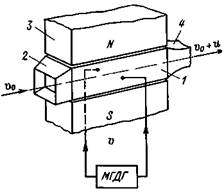
Рис. 2. Принципиальная схема кондукционной гидрореактивной МГД-установки.
1 — канал движителя; 2 — входной диффузорный насадок; 3 — электромагнит; 4 — выходное сопло.
В перистальтическом варианте исполнения электромагнитной ГРПУ канал установки разделен гибкой диафрагмой на два объема: через один из них протекает вода, а в другом течет жидкий металл. В жидком металле с помощью соответствующего индуктора по аналогии с индукционным жидкометаллическим насосом возбуждается бегущее электромагнитное поле, создающее в жидком металле соответствующую кинематическую и динамическую волну. Металл передает это движение через диафрагму воде, перемещающейся в сторону, обратную направлению движения судна.
В тепловых гидрореактивных установках наиболее существенным признаком, характеризующим процесс образования реактивной силы, является структура потока (течения), в котором происходит ускорение воды.
В каналах возможны три типа двухфазных течений, различающихся способом ускорения воды: поршневое, мелкодисперсное и перистальтическое. (Рис. 3,4.)
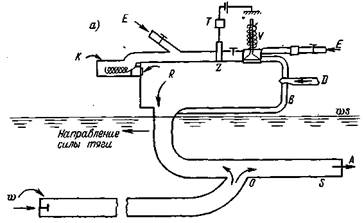
Рис. 3. Схема пульсирующей ГРПУ водопоршневого типа.
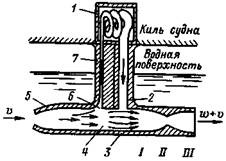
Рис. 4. Схема атомной прямоточной ГРПУ с двухфазной мелкодисперсной структурой потока в канале.
1 — ядерный реактор, парогенератор;
2 — канал подвода пара;
3 — направляющий аппарат,
4 — проточная часть;
5 — водозаборник;
6—ввод забортной воды в парогенератор;
7 — пилон-крыло; I — II — конфузор; II— III— диффузор.
Поршневые потоки характерны тем, что в канале образуются монолитные объемы воды, на определенной длине непрерывно заполняющие сечение канала. Благодаря этому скорость газа (пара) невелика и практически равна скорости движения водяных поршней, которые разгоняются под действием давления расширяющегося термодинамического рабочего тела – газа. Термодинамический процесс аналогичен процессу в расширительной машине.
В мелкодисперсном течении, вследствие разности скоростей между дискретной и сплошной фазами, происходит гидродинамическое взаимодействие. Оно реализуется в трех характерных видах.
Первый вид – вода в виде капель впрыскивается в сплошной поток газа текущего со скоростью, существенно превышающей скорость капель. За счет гидродинамических сил капли разгоняются до заданных скоростей.
Второй вид — в сплошной поток воды в зоне высокого давления камеры смешения канала подаются пузырьки термодинамического рабочего тела. Вследствие разности давлений между камерой смешения и выхлопным срезом канала пузырьки приобретают скорость, превышающую скорость воды, и увлекают ее за собой гидродинамическими силами.
Третий вид — вода в виде капель впрыскивается в поток пара, температура и скорость которого существенно больше, чем у капель. Капли разгоняются гидродинамическими силами. Но одновременно с разгоном происходят теплообмен и конденсация пара. Они настолько интенсивны, что к некоторому сечению канала поток перестраивается в другую структуру, представляющую собой поток воды с пузырьками пара. По мере развития процессов тепло- и массообмена эта структура спонтанно перестраивается в скачке уплотнения и конденсации в сплошной поток вводы.
Поскольку в последние годы появилось множество публикаций, касающихся динамики двухфазных потоков, в данном пособии более подробно их рассматривать не будем.
Перистальтический способ ускорения воды реализуется в канале, разделенном гибкой диафрагмой на два объема, в одном из которых находится пар, а через другой протекает вода. Пар подается дискретно по длине и дозированно по времени таким образом, чтобы обеспечить бегущую волну, перемещающую Диафрагму и через нее воду вдоль канала. Гибкая диафрагма в данном случае, так же как в электромагнитном варианте, не является силовым органом, а служит лишь перегородкой.
В соответствии с вышеописанными процессами тепловые ГРПУ можно классифицировать по структуре потока и способу ускорения воды следующим образом:
1. Тепловые ГРПУ с поршневой структурой потока (водопоршневые) можно подразделить на большое число разновидностей:
— по характеру протекания процесса во времени (пульсирующие и постоянного действия);
— по процессу подвода теплоты и способу ввода термодинамического рабочего тела в канал (со сгоранием при р = const и предварительной подготовкой рабочего тела или со сгоранием при V = const, происходящим непосредственно в канале);
— по виду термодинамического рабочего тела (сжатый воздух; продукты реакции с водой лития или другого горючего, реагирующего с водой; водяной пар, полученный из реактора или в результате сгорания водорода в кислороде, и т. д.);
— по конструктивному оформлению водогазораспределительных органов (с автоматическими лепестковыми водовпускными клапанами или с вращающимся золотником, с перегородкой между водой и термодинамическим рабочим телом или без нее и др.);
— по режиму работы (с одним или несколькими поршнями воды в канале, с использованием инерции поршней для создания разрежения при заполнении или с расширением до давления в забортном пространстве и т. п.).
2. Тепловые ГРПУ с газокапельной структурой потока (газожидкостные). Так же как и предыдущий вид, их можно разделить по термодинамическому циклу, источнику теплоты, используемым термодинамическим рабочим телам. Внутренняя классификация может быть такой:
- по расположению относительно поверхности воды (с выхлопом над или под водой),
- по принципу и конструкции систем, генерирующих поток термодинамического рабочего тела (устройства типа жидкостно-ракетного, газотурбинного воздушно-реактивного двигателей, паровое или воздушное сопло и т.п.),
- по режиму течения термодинамического рабочего тела (дозвуковые и сверхзвуковые),
- по конструктивным особенностям канала (например, по способу подвода воды и образования капель), и др.
3. Тепловые ГРПУ с пузырьковой структурой потока (газоводометные). Этот тип установок можно классифицировать по тому же принципу, что и предыдущий.
4. Тепловые ГРПУ перистальтического типа. Иногда в литературе встречается термин «прямоточный гидрореактивный двигатель» (или «установка»), заимствованный из авиационной техники. Он подчеркивает то обстоятельство, что окружающая среда подается в канал за счет скоростного напора, без применения механического насоса (компрессора). В этом смысле он может быть применен ко всем вышеприведенным ГРПУ, если необходимо подчеркнуть струйный характер подвода воды (без применения насосов).
Традиционно используются механические (непрямого действия) пропульсивные установки. В них химическая энергия топлива преобразуется сначала в полную энергию продуктов сгорания, а затем – в механическую энергию. Существует много различных схем ДУ, отличающихся как способом преобразования, так и движителем. (см. рис. 5). Их можно разделить на двигатели внутреннего сгорания, работающих по различным циклам (отто, дизеля, тринклера, брайтона и т.д.), и расширительные машины, в которых вырабатываемое в ПГГ рабочее тело затем расширяется в цилиндропоршневой паре. Движителем таких ДУ, как правило, служат винты, водометы либо подобные им устройства.
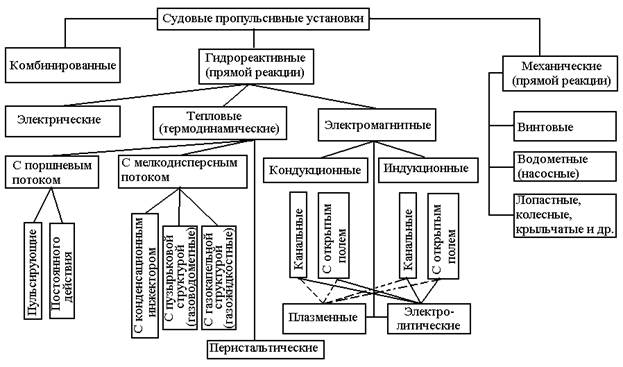
Рис. 5. Принципиальная схема классификации ГРПУ.
Естественна и практически оправдана разработка ряда комбинированных (гибридных) схем, включающих различные элементы, агрегаты и процессы, присущие гидрореактивным тепловым и электромагнитным, водометным и винтовым установкам. Так, резонно сочетание тепловой гидрореактивной установки с поршневой и пузырьковой структурами потока и с электромагнитной кондукционной установкой инжекторного типа. В этом сочетании канал должен быть расположен в поперечном магнитном поле и иметь электроды, подсоединенные к источнику питания, например магнитогидродинамическому генератору. В таком канале может происходить ускорение поршней или сплошного потока не только за счет сил Ампера, но и под действием газа в виде пузырьков или прослоек между водяными поршнями. Достоинства каждого из этих процессов будут дополнять друг друга, компенсируя недостатки. На большой глубине при достаточной солености выгоден электромагнитный способ, а на малой глубине при уменьшенной солености или даже в пресной воде — термодинамический. Одна сверхпроводящая магнитная система может создавать магнитное поле в обеих МГД - машинах — генераторе и движителе. Это сочетание может быть дополнено водометом для движения на малых скоростях, причем здесь относительно просто решаются вопросы пространственной маневренности (реверса, движения лагом, разворота на месте, погружения, всплытия, торможения и др.)
Возможны сочетания авиационных газотурбинных реактивных двигателей с гидрореактивными на судах с подводными крыльями и на воздушной подушке. Балластировка потока водой может компенсировать уменьшение кпд авиационных машин на малой скорости движения.
При необходимости количество примеров целесообразных сочетаний может быть расширено. В зависимости от задач, которые ставятся перед аппаратом, необходимо подобрать соответствующую установку с одним, двумя или многими сочетаниями процессов.
В данном пособии будут рассмотрены в основном тепловые ДУ. Электромагнитные и электростатические установки при работе потребляют много энергии, т.е. ДУ должны иметь большой объем и массу. Следовательно, для аппаратов с малым водоизмещением они непригодны
Дата добавления: 2016-06-29; просмотров: 2607;
Поиск по сайту
Узнать еще
- Аравия у истоков своей истории. Проблема заселения и развития
- Археологические источники по истории украинских земель
- Ассирия на закате своей истории.
- Ассортимент растений, рекомендуемый для создания санитарно-защитных зон и озеленения города
- Аэрокосмические методы создания карт
- Базовые инструменты создания 3D тел
- Базовые функции создания твердого тела в CAD
- Билет 9. Деление литературы на роды в истории эстетики (античная традиция, немецкая классическая эстетика).

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
