Приведение пространственной системы произвольно
Расположенных сил к заданному центру.
Условия равновесия
Согласно теореме Пуансо, всякая сила может быть перенесена параллельно её линии действия в любую точку тела. При этом, действие заданной силы заменяется действием такой же силы, приложенной в центре приведения и действием присоединенной пары сил, момент которой равен моменту заданной силы относительно центра приведения.
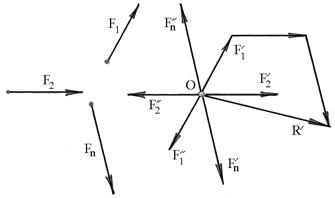
Рис.6.6
Пусть твердое тело загружено силами  ,
,  ,
,  ,…,
,…,  , не лежащими в одной плоскости (рис.6.6). Возьмем точку О тела в качестве центра приведения и приложим в ней по две взаимно уравновешенные силы
, не лежащими в одной плоскости (рис.6.6). Возьмем точку О тела в качестве центра приведения и приложим в ней по две взаимно уравновешенные силы  и
и  ,
,  и
и  ,...
,...  и
и  соответственно равные и параллельные заданным силам. В результате получаем пространственную систему сходящихся сил , ,…, - и пространственную систему пар ( , ) , ( , ),...,( , ).
соответственно равные и параллельные заданным силам. В результате получаем пространственную систему сходящихся сил , ,…, - и пространственную систему пар ( , ) , ( , ),...,( , ).
Равнодействующая  сходящихся сил , ,…, равна их геометрической сумме и называется главным вектором заданных сил.
сходящихся сил , ,…, равна их геометрической сумме и называется главным вектором заданных сил.
= + + …+
Напомним, что главный вектор и равнодействующая произвольной системы сил имеют одинаковые модули и направления, параллельны между собой, но их линии действия не совпадают.
Модуль главного вектора определяется по формуле (4.7), а его проекции на координатные оси по формулам (4.8).
Приведенные пары ( , ), ( , ),...,( , ) расположены в разных плоскостях и их действие на тело можно заменить действием одной результирующей пары, расположенной в новой плоскости. Момент этой пары  называется главным моментом заданной системы сил относительно выбранного центра.
называется главным моментом заданной системы сил относительно выбранного центра.
Если воспользоваться понятием момента силы как вектора, имеющего в пространстве три взаимно перпендикулярные составляющие, то модуль главного момента определится выражением:
 (6.9)
(6.9)
где  ,
,  ,
,  - проекции вектора главного момента на координатные оси x, y и z соответственно.
- проекции вектора главного момента на координатные оси x, y и z соответственно.
Опуская доказательство, укажем, что проекция вектора главного момента на любую ось равна алгебраической сумме моментов всех заданных сил относительно той же оси, т.е:
 ,
,  ,
,  (6.10)
(6.10)
Таким образом, произвольная система сил в пространстве приводится к главному вектору, равному геометрической сумме заданных сил и приложенному в центре приведения и к главному моменту этих сил относительно центра приведения.
Для равновесия системы сил, произвольно расположенных в пространстве необходимо, чтобы главный вектор и главный момент этой системы были одновременно равными нулю, т.е:
= 0 и  (6.11)
(6.11)
Используя формулы (6.5) и (6.9) с учетом зависимостей (6.6) и (6.10), устанавливаем, что равенства (6.11) возможны при выполнении следующих шести условий:
 ,
,  ,
, 
 ,
,  ,
,  (6.12)
(6.12)
Следовательно, система произвольно расположенных сил в пространстве находится в равновесии в том случае, когда одновременно равны нулю алгебраические суммы проекций всех сил на три взаимно перпендикулярные оси и алгебраические суммы моментов всех сил относительно тех же осей.
Из условий (6.12) вытекают уравнения равновесия, решение которых дает возможность вычислить шесть неизвестных параметров системы сил, под действием которой тело находится в равновесии. Обычно в задачах статики неизвестными являются величины и направления реакций опорных связей. Если же система сил имеет более шести неизвестных параметров, то задача является статически неопределимой. Решение таких задач рассматривается в статике сооружений.
Дата добавления: 2018-11-26; просмотров: 1275;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
