Состав и характеристики пропульсивного комплекса и ГД.
В состав пропульсивного комплекса входят: главный двигатель (ГД), главная передача, валопровод, движитель (обычно гребной винт) и корпус судна. Взаимодействие этих элементов определяет технико-экономические, эксплуатационные и мореходные качества судна.
На рисунке 1.1 изображена схема судового пропульсивного комплекса [3], иллюстрирующая взаимные связи его элементов и факторы, влияющие на эффективность их работы.
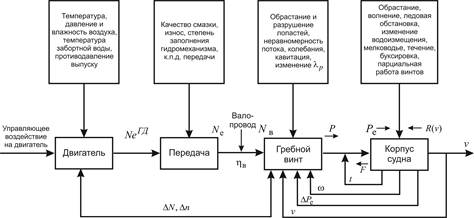
 – эффективная суммарная мощность ГД; Nв– мощность, подведенная к движителю; ∆N и ∆n – изменение мощности и частоты вращения; P и Pe – упор и полезная тяга гребного винта; v – скорость судна; R(v) – сопротивление воды движению судна со скоростью v; lp – относительная поступь винта
– эффективная суммарная мощность ГД; Nв– мощность, подведенная к движителю; ∆N и ∆n – изменение мощности и частоты вращения; P и Pe – упор и полезная тяга гребного винта; v – скорость судна; R(v) – сопротивление воды движению судна со скоростью v; lp – относительная поступь винта
Рис 1.1. Схема судового пропульсивного комплекса
Корпус судна является элементом ПК. Характеристика сопротивления движению воды R=f(v) является определяющим фактором в работе ПК. Вид этой характеристики определяется соотношением базового и волнового сопротивлений.
При известных расчетных значениях сопротивления R и скорости v эту зависимость можно представить в виде функции
 ,
,
где показатель kR зависит от скорости движения и числа Фруда. При малых скоростях судна и числах Фруда Fr<0,15 основную роль играет вязкостное сопротивление и для водоизмещающих судов kR=1,9...1,95. При числах Фруда Fr>0,2 заметную роль играет волновое сопротивление. Коэффициент волнового сопротивления увеличивается и принимает значения kR >2. особенно резко возрастает сопротивление при движении на мелководье при приближении к критической скорости  .
.
Для водоизмещающих судов, движущихся с умеренными скоростями изменение сопротивления движению можно приблизительно считать пропорциональной смоченной поверхности корпуса судна.
Корпус судна определяет зависимости сопротивления движению судна от его скорости. Обводы, размеры и состояние корпуса и кормовой части судна, расположение и режимы нагружения гребного винта влияют на пропульсивные качества и оцениваются коэффициентом влияния корпуса
 ,
,
где  – коэффициент попутного потока
– коэффициент попутного потока  =0,2...0,45;
=0,2...0,45;
t – коэффициент засасывания t = 0,12...0,3.
Гребной винт встречает воду не со скоростью движения судна, а со скоростью va, уменьшенной на величину скорости попутного потока, который вызван трением воды вдоль сторон корпуса и увеличивает упор винта. Кроме того, в процессе работы ГВ засасывает воду из под кормы, отбрасывая ее назад и уменьшая давление воды на кормовую часть.
Сила засасывания F направлена против движения и суммируется с буксировочным сопротивлением R, на преодоление которого затрачивается часть упора винта, называемая полезной тягой 
 . Коэффициент засасывания
. Коэффициент засасывания
 .
.
Влияние попутного потока на работу ПК учитывается коэффициентом попутного потока
 .
.
Валопровод, включающий в себя при наличии и редукторную передачу, характеризуется крутящим моментом, передаваемой мощностью, частотой вращения ведущего и ведомых валов.
Потери мощности неизбежно возникающие в редукторной передаче и в подшипниках валопровода характеризуются к.п.д. передачи  и к.п.д. валопровода
и к.п.д. валопровода  . Требуемая эффективная мощность ГД Nе должна быть больше мощности, подводимой к винту Nв на величину этих потерь.
. Требуемая эффективная мощность ГД Nе должна быть больше мощности, подводимой к винту Nв на величину этих потерь.
В качестве судовых движителей, преобразующих механическую энергию ГД в упор P (часть которого составляет полезную тягу), чаще всего применяют гребные винты, которые могут иметь фиксированных шаг (ВФШ) и регулируемые шаги (ВРШ). ВРШ обеспечивают реверс судна при нереверсивном ГД и позволяющие эффективно использовать мощность в условиях плавания, отличающихся от спецификационных.
В установках с ВФШ при увеличении сопротивления движению судна сначала изменяется момент сопротивления, а потом частота вращения ГД с ВФШ.
При увеличении сопротивления движению, воздействующему на корпус судна (+∆R) увеличится нагрузка на гребной винт и ГД (+∆Pe, +∆N). Обороты ГД и, соответственно винта, снизятся (-∆N). Регулятор частоты вращения отреагирует на это увеличением подачи топлива. Затем частота вращения восстановится (+∆n), если у ГД имеется резерв по мощность (+∆N).
Если техническое состояние двигателя и метеоусловия эксплуатации (рост температуры заборной воды и воздуха, влажности воздуха и т.п.) не позволяют повысить мощность , то частота вращения ВФШ снизиться (-∆n). При использовании ВРШ автоматический регулятор нагрузки уменьшит разворот лопастей винта, чтобы не допустить перегрузку ГД, если подача топлива выходит за пределы ограничительной зависимости.
Работа ГВ характеризуется создаваемым упором P, поступью винта, частотой вращения и к.п.д. винта. К.П.Д. винта в свободной воде (без учета влияния корпуса) определяется как отношение мощности упора винта  (
(  )
)  к мощности на гребном валу
к мощности на гребном валу  Осевая скорость винта относительно воды
Осевая скорость винта относительно воды  незначительно отличается от скорости
незначительно отличается от скорости  . Отличие вызвано наличием некоторой неравномерности поля скоростей в диске винта (
. Отличие вызвано наличием некоторой неравномерности поля скоростей в диске винта (  ).
).
 .
.
Поступь винта hp– это путь пройденный винтом в воде за один оборот. Относительная поступь – это поступь, отнесенная к диаметру винта D.
Если бы гребной винт вращался в твердой среде, как саморез в деревянном бруске или, как штопор в пробке, то за один оборот он бы прошел расстояние, равное шагу винта H без скольжения.
Скольжение S – безразмерная величина, определяемая как отношения скорости скольжения  к осевой скорости винта в «твердой среде», равной
к осевой скорости винта в «твердой среде», равной 
 .
.
В реальных условиях скольжение винта относительно воды является условием создания упора винта. Винт отбрасывает воду назад и создает упор. Без скольжения не будет и упора винта.
Упор ГВ зависит прямопропорционально от массы и скорости отбрасываемой воды, а потери энергии с отбрасываемой частью воды пропорциональны произведению массы на скорость воды в квадрате, поэтому к.п.д. винта будет увеличиваться при увеличении диаметра D и снижении частоты вращения винта np.
КПД винта зависит от относительной поступи
 ,
,
а также от обводов корпуса и имеет для ВФШ ярко выраженное оптимальное значение при определенном  .На рисунке 2.2 приведены кривые действия геометрически подобных винтов фиксированного и регулируемого шага [4].
.На рисунке 2.2 приведены кривые действия геометрически подобных винтов фиксированного и регулируемого шага [4].
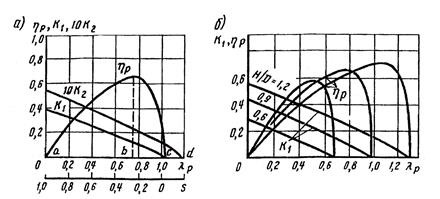
Рисунок 2.2 – Кривые действия гребных винтов:
а) – ВФШ; б) – ВРШ
Соответствующие зависимости для упора, момента, мощности и к.п.д. винта при упрощающих допущениях, что MB ~ n2p , NB ~  выразятся формулами:
выразятся формулами:
 ;
;
 ;
;
 ;
;
 .
.
Из анализа зависимостей к.п.д. на рисунке 2.2а и 2.2б видно, что ВРШ обеспечивает работу с высоким к.п.д. в широком диапазоне режимов. Работа винта в широком диапазоне изменений величины и S происходит при больших воздействиях на сопротивление движению судна (разгон, торможение, работа во льдах).
Существует целый ряд типов судов (буксиры, траулеры, спасательные и пожарные суда), которые часто меняют режимы работы. На этих судах целесообразно применять ВРШ.
Пропульсивный коэффициент – это отношение буксировочной мощности к мощности, подводимой к винту
 .
.
Пропульсивный коэффициент характеризует гидромеханические потери на ГВ при его взаимодействии с корпусом.
Помимо этих потерь следует учитывать потери в редукторной передаче (при ее наличии), валопроводе  и потери в ГД.
и потери в ГД.
Тогда КПД пропульсивного комплекса представляется в виде
 .
. 
Пропульсивный комплекс должен обеспечить не только заданную спецификационную скорость движения судна за счет создания тяги Pe и подведение к винту мощности Nв, но и обеспечить надежную работу в определенном диапазоне скоростей и частот вращения.
Дата добавления: 2020-04-12; просмотров: 1442;
Поиск по сайту
Узнать еще
- E) Расчет структурных составляющих очага деформации с одним нейтральным сечением
- II. Основные характеристики микроскопа.
- II. Химический состав природных воды
- II.2. Химический (молекулярный) состав нефтей и природных газов
- III этап. Составление программного кода
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
