Аналітичне дослідження кінематики плоских важільних механізмів методом замкнутих векторних контурів
У технічній літературі опубліковано велику кількість праць з аналітичного дослідження плоских важільних механізмів. Проте, якщо розглянути загальні методи розв'язку цих задач, універсальні для будь-якого механізму, можна виділити два їх різновиди [18]:
-метод замкнутих (замкнених) векторних контурів, який запропонував В. А. Зінов'єв;
- метод перетворення координат, який запропонував Ю. Ф. Морошкін.
Перший метод більш зручний для кінематичного дослідження плоских механізмів, другий - для просторових механізмів. Розглянемо метод замкнутих векторних контурів. При цьому методі аналітичні залежності для визначення основних кінематичних параметрів можна одержати, якщо умовно уявити механізм замкнутим векторним контуром, утвореним ланками цього механізму. Методику одержання розрахункових залежностей розглянемо на прикладі шарнірного чотири ланкового механізму, кінематичну схему якого зображено на рис. 3.10.
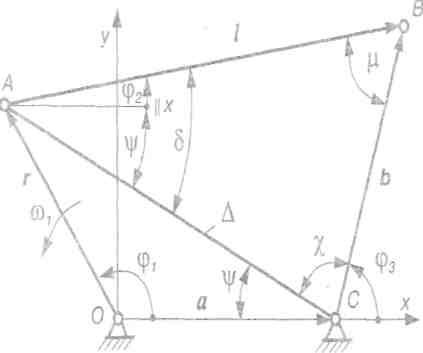
Рис.3.10. Метод замкнутих контурів
Цей механізм можна зобразити у вигляді замкнутого векторного контуру ОАВС, для якого запишемо таке векторне рівняння:


Спроектуємо одержаний векторний контур на координатні осі х і у та запишемо рівняння проекцій на ці осі:

де  - узагальнена координата (кут повороту кривошипа).
- узагальнена координата (кут повороту кривошипа).
Всі кути  , які визначають положення ланок, відраховують проти руху годинникової стрілки від лінії, що паралельна осі абсцис х і проведена через початок відповідного вектора; початок відрахунку позначають точкою, напрямок - стрілкою. Можна відраховувати кути від іншої лінії. Кути, які відраховують проти руху годинникової стрілки, будемо вважати додатними, за рухом годинникової стрілки - від'ємними.
, які визначають положення ланок, відраховують проти руху годинникової стрілки від лінії, що паралельна осі абсцис х і проведена через початок відповідного вектора; початок відрахунку позначають точкою, напрямок - стрілкою. Можна відраховувати кути від іншої лінії. Кути, які відраховують проти руху годинникової стрілки, будемо вважати додатними, за рухом годинникової стрілки - від'ємними.
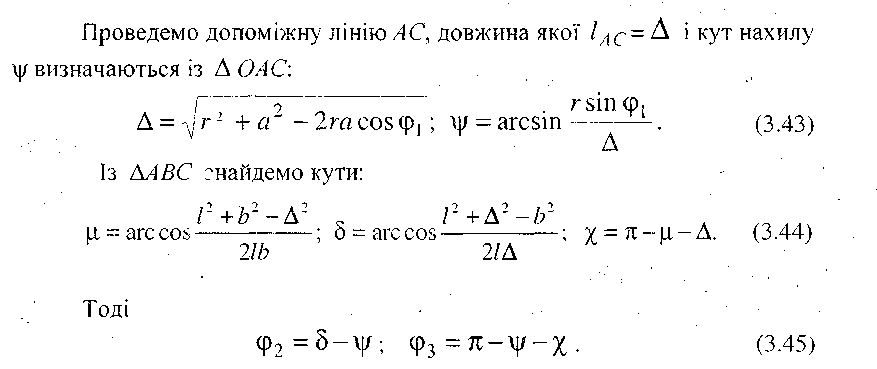
Значення кутів  і
і  можна одержати безпосередньо із рівнянь (3.42), проте у цьому випадку необхідно розв'язати квадратне рівняння, в якому часом важко вірно вибрати його корені. Тому зручніший такий порядок розрахунку.
можна одержати безпосередньо із рівнянь (3.42), проте у цьому випадку необхідно розв'язати квадратне рівняння, в якому часом важко вірно вибрати його корені. Тому зручніший такий порядок розрахунку.
|
Треба пам'ятати, що кути  , у загальному випадку мають знак „+" або „-", що враховується при розрахунках.
, у загальному випадку мають знак „+" або „-", що враховується при розрахунках.
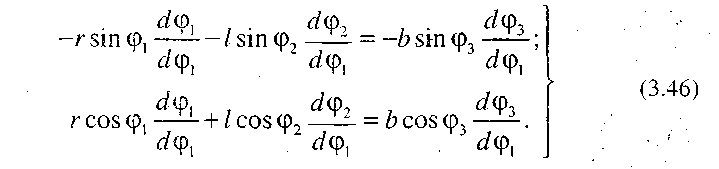
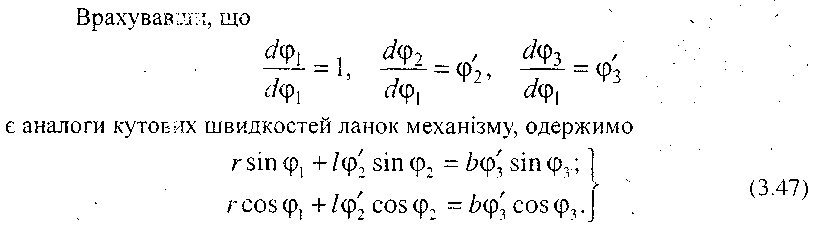
Для визначення аналогів швидкостей продиференціюємо рівняння (3.42) за узагальненою координатою. Одержимо:
|
|
Щоб встановити аналоги швидкостей  і
і  скористаємось першим рівнянням (3.47), в якому від усіх кутів віднімемо спочатку кут
скористаємось першим рівнянням (3.47), в якому від усіх кутів віднімемо спочатку кут  а потім кут
а потім кут  , що відповідає повороту системи координат хОу спочатку на кут (-
, що відповідає повороту системи координат хОу спочатку на кут (-  ), а потім на кут (-
), а потім на кут (-  ). При цьому одержимо
). При цьому одержимо


Для визначення аналогів прискорень продиференціюємо за узагальненою координатою рівняння (3.48) і одержимо




Цей метод може бути використаний і для більш складних механізмів, до яких входить декілька структурних груп II класу. При цьому потрібно розглянути таку саму кількість замкнених векторних контурів. Для кожного контуру окремо складають векторні рівняння замкнутості, проектують їх на координатні осі і одержують рівняння проекцій, за якими находять положення ланок, потім шляхом диференціювання рівнянь проекцій визначають аналоги швидкостей і прискорень. Проте остаточні залежності для з'ясування кінематичних параметрів у таких механізмах залежать не тільки від кількості та виду груп, які складають механізм, але й від положення точок приєднання до ланок попередніх груп і варіантів зборки. Це призводить до того, що для кожного механізму одержують свої алгоритми і досить громіздкі програми для комп'ютерів, які вимагають значних затрат часу на їх складання і від-ладку. Скласти бібліотеку індивідуальних програм для всіх механізмів недоцільно і неможливо. Раціональніше створити уніфіковані блоки підпрограми), використовуючи які можна скласти програму кінематичного дослідження будь-якого важільного механізму [4, 6, 8, 10].
Методика аналітичного дослідження кінематики просторових механізмів методом перетворенням координат розглядається в підручниках [1,9, 18].
Питання для самоперевірки
І. Задачі і методи кінематичного дослідження механізмів. 2. Що розуміють під періодом (циклом) руху механізму? 3. Які допущення роблять при кінематичному дослідженні механізмів ?4. Як побудувати положення механізмів методом засічок ?5. Що розуміють під масштабом побудови? 6. Як визначити крайні (мертві) положення кривошипно-повзунного, шарнірного чотириланкового та кулісного механізмів? 7. Як побудувати діаграми переміщень, швидкостей та прискорень руху ланки? 8. Що називають планом швидкостей і прискорень? Наведіть два типи векторних рівнянь, які використовують при побудові планів швидкостей та прискорень. 9. Сформулюйте теореми подібності планів швидкостей і прискорень. Яка різниця між ними? 10. Запишіть формули для визначення нормального і коріолісового прискорень, кутових швидкостей і прискорень. Визначіть їх напрямки. 11. Аналоги швидкостей і прискорень. 12. Як визначити аналітичним способом переміщення, швидкості і прискорення плоских механізмів? 13. Чи залежить алгоритм кінематичного дослідження руху ланок структурної групи від механізму, до складу якого входить ця група?
Розділ 4
Дата добавления: 2016-06-15; просмотров: 3198;
Поиск по сайту
Узнать еще
- I. Расчёт методом контурных токов.
- II. Расчёт методом суперпозиции.
- IV. Расчёт простых цепей постоянного тока методом эквивалентных преобразований сопротивлений.
- Інтерпретація результатів дослідження
- АКСОHОМЕТРИЧЕСКИЕ ПРОЕКЦИИ ПЛОСКИХ ФИГУР
- Аксономертрические проекции плоских фигур
- Алгоритм вычисления ПХ классическим методом
- Алгоритм вычисления ПХ операторным методом

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
