Дослідження руху механізмів методом кінематичних діаграм
Маючи діаграму (графік) переміщень будь-якої точки або ланки механізму як функцію шляху .9 залежно від часу і, методом графічного диференціювання можна визначити швидкості і прискорення точки (ланки), рух якої розглядають
Для побудови діаграми швидкостей v=v(t) використовують залежність

Як відомо, похідна функції s=s(t) у точці А (рис.3.3) визначається тангенсом кута нахилу дотичної до цієї кривої s=s{t), яка проведена через точку А.
З урахуванням масштабів побудови діаграми s=s(t) можна записати, що

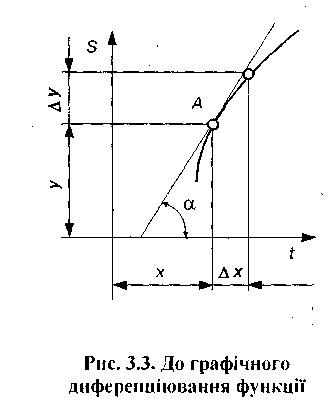
Рис. 3.3. До графічного диференціювання функції
Тоді залежність (3.2) набуде вигляду
де  - кут нахилу дотичної у т
- кут нахилу дотичної у т  очці А діаграмми s=s(t);
очці А діаграмми s=s(t);  ,
,  - масштаби діаграми по осі ординат і осі абсцис відповідно.
- масштаби діаграми по осі ординат і осі абсцис відповідно.
Із залежності (3.3) видно, що швидкість руху точки в будь-якому положенні пропорційно зв'язана з тангенсом кута нахилу дотичної, оскільки масштаби  ,
,  є сталими величинами.
є сталими величинами.
Таким чином, щоб побудувати діаграму швидкостей  , беруть ряд точок на діаграмі s=s(t) і через них проводять дотичні. Знайшовши тангенс кутів нахилу цих дотичних у відповідних положеннях, будують діаграму
, беруть ряд точок на діаграмі s=s(t) і через них проводять дотичні. Знайшовши тангенс кутів нахилу цих дотичних у відповідних положеннях, будують діаграму  Ця діаграма одночасно буде діаграмою швидкостей у деякому масштабі, який можна знайти, використовуючи залежність (3.3).
Ця діаграма одночасно буде діаграмою швидкостей у деякому масштабі, який можна знайти, використовуючи залежність (3.3).
Для побудови діаграм швидкостей і прискорень можуть використовуватися два методи - дотичних і хорд.
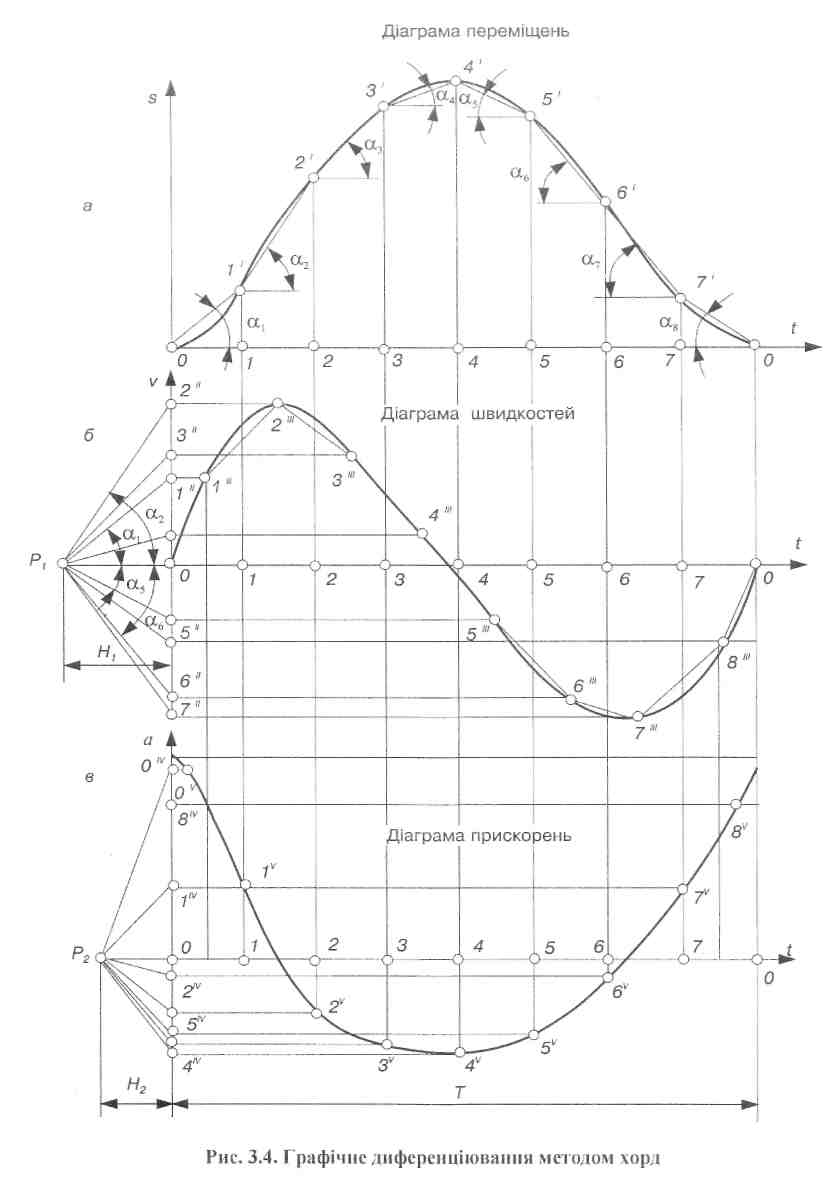
Надалі розглянемо лише метод хорд оскільки метод дотичних досить незручний, бо дуже важко точно проводити дотичні до кривих і добитися стабільних результатів. Тому на практиці більшого поширення набув метод хорд, який ґрунтується на відомій теоремі про кінцевий приріст функції: якщо функція та її перша похідна безперервні, то на будь-якому інтервалі, наприклад 0-1 (рис. 3.4, а), хорда 0-1’, яка стягує дугу, буде паралельна дотичній до кривої s=s(t) хоча б в одній точці, що лежить у середині цього інтервалу. Тому при цьому методі на діаграмі s=s(t), замість дотичних проводять хорди 0-1, 1-2', 2'-3',...,7-0 (рис. 3.4, а), а на діаграмі  (рис. 3.4, б) із точки Р1 - промені Р1-1", P1-2", P1- 3",..., Р1-7” які паралельні відповідним хордам, до перетину з віссю ординат
(рис. 3.4, б) із точки Р1 - промені Р1-1", P1-2", P1- 3",..., Р1-7” які паралельні відповідним хордам, до перетину з віссю ординат  . Відрізки 0-1”, 0-2", 0-3",..., 0-7" у масштабі
. Відрізки 0-1”, 0-2", 0-3",..., 0-7" у масштабі  визначають значення швидкостей десь посередині відповідних інтервалів часу.
визначають значення швидкостей десь посередині відповідних інтервалів часу.
Масштаб швидкостей  можна визначити, використавши залежність (3.3), в яку треба підставити
можна визначити, використавши залежність (3.3), в яку треба підставити


де  - відрізки 0-1",0-2",...,0-7" (див. рис. 3.4,6).
- відрізки 0-1",0-2",...,0-7" (див. рис. 3.4,6).
Із залежності (3.4) видно, що за допомогою відрізка Я, можна змінювати масштаб побудови діаграми швидкостей.
Для спрощення побудови діаграм відрізки 0-1", 0-2", 0-3",. ..,0-7" відкладають посередині відповідних інтервалів часу. Точки 0, 1"’, 2'", З'",...,7’" з'єднують плавною кривою і одержують з певною точністю діаграму швидкостей  . Чим менший інтервал часу розглядається, тобто чим більше проведено хорд тим більше наближаються до заданої кривої. Особливу увагу треба звернути на ділянку, де крива, яку диференціюють, має екстремум. У цьому місці криву треба розділити на менші ділянки (проміжки часу). Значення швидкостей у відповідних положеннях механізму визначаються відповідними ординатами діаграми
. Чим менший інтервал часу розглядається, тобто чим більше проведено хорд тим більше наближаються до заданої кривої. Особливу увагу треба звернути на ділянку, де крива, яку диференціюють, має екстремум. У цьому місці криву треба розділити на менші ділянки (проміжки часу). Значення швидкостей у відповідних положеннях механізму визначаються відповідними ординатами діаграми  помноженими на масштаб
помноженими на масштаб 
Маючи діаграму швидкостей  , аналогічно будують діаграму прискорень а=а(t), виходячи із того, що
, аналогічно будують діаграму прискорень а=а(t), виходячи із того, що

Отже, щоб побудувати діаграму прискорень, необхідно продиференціювати діаграму швидкостей за часом, провівши відповідно на діаграмі  хорди 0-1", 1",-2'" і т. д., а з точки Р2 діаграми прискорень відповідні промені Р2-0ІV, Р2-1IV і т. д., які паралельні цим хордам. Масштаб прискорень
хорди 0-1", 1",-2'" і т. д., а з точки Р2 діаграми прискорень відповідні промені Р2-0ІV, Р2-1IV і т. д., які паралельні цим хордам. Масштаб прискорень  визначається за формулою
визначається за формулою

де Н2 - довжина відрізка 0Р2 на діаграмі прискорень.
Аналогічно будують діаграми кутових швидкостей і кутових прискорень при заданій діаграмі кутових переміщень ланки.
Порівнюючи побудовані графіки переміщень, швидкостей і прискорень (рис. 3.4), можна встановити між ними такі залежності:
1) зростанню ординат кривої, що диференціюється, відповідають додатні значення ординат диференціальної кривої, а зменшенню - від'ємні значення;
2) при максимумі кривої, що диференціюється, диференціальна крива переходить через нуль від додатних значень ординат до від'ємних, а при мінімумі - від від'ємних значень ординат до додатних;
3) точці перегину кривої, що диференціюється, відповідає максимум або мінімум на диференціальній кривій.
3.4. Дослідження руху механізмів методом планів швидкостей і прискорень
Розглянутий метод графічного дослідження механізмів при всій його простоті та наочності не розв'язує повністю питання кінематики механізмів. Побудовані діаграми переміщень, швидкостей і прискорень дають уявлення лише про скалярні кінематичні величини руху однієї точки (або ланки), напрямки ж векторів цих величин залишаються невідомими Кінематичні параметри швидкості та прискорення точки можна визначати за допомогою графічного диференціювання лише після того, як побудовані її траєкторія і графік переміщень.
У практичному застосуванні при дослідженні руху механізмів досить точним і зручним є графоаналітичний метод, що ґрунтується на побудові планів швидкостей і прискорень. Перевагою цього методу є те, що в результаті побудови планів одержують не тільки величини, але й напрямки швидкості та прискорення заданих точок механізму. Теоретичні основи побудови планів швидкостей і прискорень розглядаються в курсі теоретичної механіки. Згадаємо деякі з положень, необхідні для побудови планів швидкостей і прискорень [9, 17].
Плани швидкостей.Візьмемо будь-яке тіло К, що здійснює плоский рух. Положення твердого тіла в загальному випадку визначається трьома точками А, В, С (рис. 3.5, а), які незмінно зв'язані з тілом і утворюють жорсткий трикутник АВС (на рис. 3.5, а заштрихований).
Нехай відомі швидкості  відповідно точок А, В, С і положення миттєвого центра швидкостей Р . Вектор швидкості будь-якої точки направлений перпендикулярно до радіуса-вектора, який з'єднує цю точку з точкою Р , тобто
відповідно точок А, В, С і положення миттєвого центра швидкостей Р . Вектор швидкості будь-якої точки направлений перпендикулярно до радіуса-вектора, який з'єднує цю точку з точкою Р , тобто

|
|
Швидкості точок пропорційні відповідним радіусам:
тому що

де w - миттєва кутова швидкість тіла К .
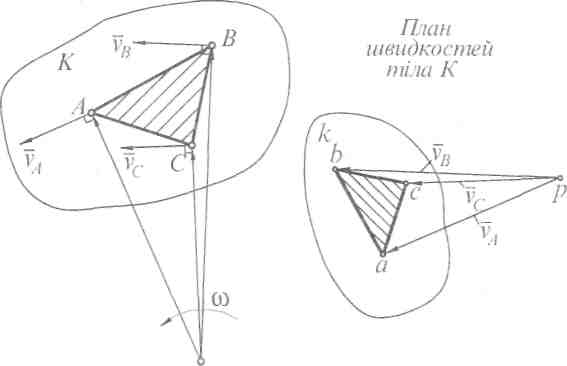
Рис. 3.5. До побудови плану швидкостей тіла
Візьмемо тепер будь-яку довільну точку р на площині (рис. 3.5, б) і побудуємо в деякому масштабі  з цієї точки вектори швидкостей точок А, В, С. З'єднавши прямими точки а, b і с - кінці векторів швидкостей
з цієї точки вектори швидкостей точок А, В, С. З'єднавши прямими точки а, b і с - кінці векторів швидкостей  а,
а,  в,
в,  с - одержимо план швидкостейтіла АВС. Якщо таким чином побудувати вектори швидкостей усіх крайніх точок тіла К і з'єднати їх між собою, то на плані швидкостей одержимо фігуру k , яка буде подібна до тіла К . Отже, планом швидкостей будь-якого твердого тіла (ланки) є геометричне місце кінців векторів швидкостей крайніх точок цього тіла, які відкладені з однієї довільної точки, що називається полюсом плану швидкостей
с - одержимо план швидкостейтіла АВС. Якщо таким чином побудувати вектори швидкостей усіх крайніх точок тіла К і з'єднати їх між собою, то на плані швидкостей одержимо фігуру k , яка буде подібна до тіла К . Отже, планом швидкостей будь-якого твердого тіла (ланки) є геометричне місце кінців векторів швидкостей крайніх точок цього тіла, які відкладені з однієї довільної точки, що називається полюсом плану швидкостей
У зв'язку з тим, що відрізки ра, рb, рс перпендикулярні радіусам РА, РВ, РС і пропорційні їм, вся фігура раbс подібна фігурі РАВС і повернута відносно неї на 90° в бік миттєвого обертання. Це характерно й для фігури аbс, яка подібна фігурі АВС .
Звідси одержимо теорему подібностідля планів швидкостей.
План швидкостей твердого тіла (ланки) подібний тілу і повернутий відносно нього на 90° у бік миттєвого обертання тіла.
Теорема подібності справедлива тільки для незмінної системи твердого тіла (ланки) - і ні в якому випадку для механізму в цілому, який є змінною системою. Для механізму, який складається з системи ланок і який при русі постійно міняє свою форму, можна лише мати сукупність планів швидкостей окремих ланок, що побудовані з одного полюса, спільного для всіх ланок. Такий рисунок називають планом швидкостей механізму.
План швидкостей аbс тіла АВС (рис. 3.5) розташований однаково з цим тілом, тобто, якщо обходити план швидкостей і тіло в одному напрямку, наприклад від точок а і А за годинниковою стрілкою, то порядок літер буде однаковий: аbс і АВС. Крім того, якщо вибрати аb-АВ і накласти план швидкостей аbс на тіло АВС, то відповідні точки плану збігаються з точками тіла, а полюс р плану швидкостей збігатиметеся з точкою Р - миттєвим центром швидкостей тіла К. Тому план швидкостей ще називають зображенням тіла.
Надалі позначатимемо точки ланок великими літерами {А, В, С,...), а їхні зображення на плані швидкостей - малими (а, b, с,...). Плани швидкостей механізму можна будувати методом подібності, використовуючи теорему подібності, і методом векторних рівнянь. Але через те, що плани прискорень можна будувати тільки методом векторних рівнянь, далі розглянемо більш детально останній
В основі методу векторних рівняньлежить теорема про розклад складного руху на два прості: переносний івідносний.
Для прикладу побудуємо план швидкостей кривошипно-повзунного механізму (рис 3.6), для якого задані кінематична схема і закон руху кривошипа ОА (w1=const). Якщо задана частота обертання n1(хв-1), то для визначення кутової швидкості скористаємося залежністю w1 =  .
.
План швидкостей. Розв'язування задачі розпочнемо з визначення швидкості точки А початкової ланки:  (10А - дійсна довжина кривошипа ОА, м).
(10А - дійсна довжина кривошипа ОА, м).

Вектор  А направлений перпендикулярно до кривошипа ОА в бік його руху. Зобразимо цей вектор відрізком ра (рис. 3.6, б), який у масштабі визначає величину цієї швидкості:
А направлений перпендикулярно до кривошипа ОА в бік його руху. Зобразимо цей вектор відрізком ра (рис. 3.6, б), який у масштабі визначає величину цієї швидкості:  А=(ра)
А=(ра)  .
.
Щоб знайти швидкість точки В, яка є спільною для шатуна А В і повзуна В, згадаємо теорему про розклад складного руху на переносний і відносний. Шатун АВ здійснює складний рух, який можна розкласти на два прості: переносний (поступальний) зі швидкістю  А точки А і відносний (обертовий) відносно точки А зі швидкістю
А точки А і відносний (обертовий) відносно точки А зі швидкістю  ВА.
ВА.
б в
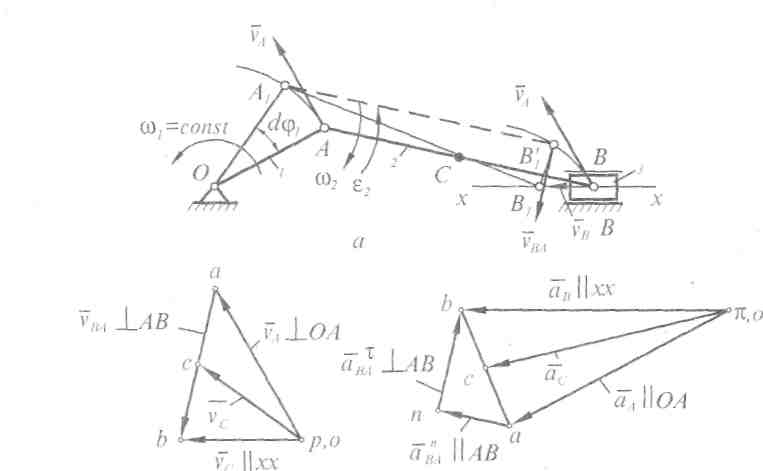
Рис. 3.6. Побудова планів швидкостей та прискорень кривошипно-повзуного механізму:
а) кінематична схема механізму; б) план швидкостей; в) план прискорені.
Дійсно, якщо надати кривошипу елементарне переміщення  , то центр шарніра А переміститься в точку А1, шарніра В - у точку B1. При такому русі шатун АВ здійснює складний рух: точка А рухається дугою кола, точка В - прямою лінією. Нехай спочатку всі точки шатуна АВ рухаються, як точка А, зі швидкістю
, то центр шарніра А переміститься в точку А1, шарніра В - у точку B1. При такому русі шатун АВ здійснює складний рух: точка А рухається дугою кола, точка В - прямою лінією. Нехай спочатку всі точки шатуна АВ рухаються, як точка А, зі швидкістю  , при цьому вісь шатуна займе положення А1 В1’. Потім, прийнявши точку А1, за нерухомий центр (полюс), повернемо шатун А В так, щоб точка В1’ потрапила на свою дійсну траєкторію х-х, тобто в точку В1 .
, при цьому вісь шатуна займе положення А1 В1’. Потім, прийнявши точку А1, за нерухомий центр (полюс), повернемо шатун А В так, щоб точка В1’ потрапила на свою дійсну траєкторію х-х, тобто в точку В1 .
Отже, при заміні дійсного руху шатуна АВ двома умовними, що дає такий самий кінцевий результат переміщення, центр шарніра В набув послідовно дві швидкості: при поступальному русі -  А, при обертовому - відносну швидкість
А, при обертовому - відносну швидкість  ва точки В відносно точки А, яка невідома нам за величиною, але відома за напрямком (
ва точки В відносно точки А, яка невідома нам за величиною, але відома за напрямком ( 
 АВ). На основі цього запишемо векторне рівняння для знаходження швидкості точки В:
АВ). На основі цього запишемо векторне рівняння для знаходження швидкості точки В:

Для визначення векторів швидкостей  і
і  проведемо через точку а (рис. 3.8, б) лінію, яка показує напрямок вектора відносної швидкості, а з полюса р лінію, паралельну руху повзуна В (|| х-х), точка перетину цих ліній визначить точку b - кінець векторів
проведемо через точку а (рис. 3.8, б) лінію, яка показує напрямок вектора відносної швидкості, а з полюса р лінію, паралельну руху повзуна В (|| х-х), точка перетину цих ліній визначить точку b - кінець векторів  і
і  ва. Відрізок аb не тільки визначає у масштабі величину (модуль) відносної швидкості
ва. Відрізок аb не тільки визначає у масштабі величину (модуль) відносної швидкості  = =(аb)
= =(аb)  , але й одночасно він є планом швидкостей шатуна АВ. А тому точка С, яка лежить на ньому, згідно теореми подібності, на плані лежатиме на відрізку аb. Склавши пропорцію
, але й одночасно він є планом швидкостей шатуна АВ. А тому точка С, яка лежить на ньому, згідно теореми подібності, на плані лежатиме на відрізку аb. Склавши пропорцію

знайдемо довжину відрізка
Відкладемо відрізок ас на плані швидкостей і, з'єднавши точку с з полюсом p, знайдемо швидкість точки С:  с = (рс)
с = (рс)  .
.
Планом швидкостей кривошипа О А буде відрізок ра (точка О, як нерухома, потрапила в полюс р), повзуна В - точка b (всі точки повзуна мають однакову швидкість  ).
).
Знайшовши лінійні швидкості всіх ланок механізму, можна встановити їхні кутові швидкості. У даному випадку кутова швидкість шатун AB

де 
 ВА = (аb)
ВА = (аb)  .
.
Для визначення напрямку кутової швидкості w2 перенесемо вектор швидкості  у точку В (рис.3.6, а) і розглянемо рух точки В відносно точки А у напрямку швидкості
у точку В (рис.3.6, а) і розглянемо рух точки В відносно точки А у напрямку швидкості  . У нашому випадку кутова швидкість w2 напрямлена за рухом годинникової стрілки.
. У нашому випадку кутова швидкість w2 напрямлена за рухом годинникової стрілки.
План прискорень. Плани прискорень будують аналогічно планам швидкостей.
Планом прискорень будь-якого твердого тіла (ланки) називають геометричне місце кінців векторів прискорень крайніх його точок, які відкладені з однієї довільної точки, що називається полюсом плану прискорень.
Теорема подібності для планів прискорень формулюється так
План прискорень будь-якого тіла (ланки) подібний тілу і повернутий відносно нього на деякий невизначений кут. А тому плани прискорень можна побудувати тільки методом векторних рівнянь.
Розглянемо методику побудови планів прискорень на прикладі кривошипно-повзунного механізму (див. рис. 3.6). Вихідними даними для побудови плану прискорень є положення ланок механізму (план механізму) і план швидкостей. Рівняння, які використовуються при побудові плану прискорень, відрізняються тільки тим, що повні прискорення точки розкладають на певні складові. У даному випадку (рис. 3.6, а) повне прискорення точки А є геометрична сума нормального (доцентрового) і дотичного (тангенціального) прискорень:

Нормальне прискорення a  напрямлене по лінії АО до центра обертання кривошипа О, дотичне а
напрямлене по лінії АО до центра обертання кривошипа О, дотичне а  - перпендикулярно до АО і направлене в бік напрямку кутового прискорення
- перпендикулярно до АО і направлене в бік напрямку кутового прискорення  ланки 1. Модулі цих прискорень находять із співвідношень:
ланки 1. Модулі цих прискорень находять із співвідношень:

Якщо початкова ланка обертається рівномірно (w1=const), то  а значить у даному випадку a
а значить у даному випадку a  =0, тобто прискорення точки аА =апА0.
=0, тобто прискорення точки аА =апА0.
Прийнявши деяку точку  за полюс плану прискорень (рис. 3.6, в), відкладемо вектор, який зображує нормальне прискорення точки А, у вигляді відрізка
за полюс плану прискорень (рис. 3.6, в), відкладемо вектор, який зображує нормальне прискорення точки А, у вигляді відрізка  а. Тоді масштаб (масштабний коефіцієнт) прискорень знайдемо із співвідношення
а. Тоді масштаб (масштабний коефіцієнт) прискорень знайдемо із співвідношення

Прискорення точки В найдемо з рівняння, аналогічного рівнянню (3.8):

де вектор прискорення ав напрямлений уздовж напрямної х-х. Розкладаємо відносне прискорення аВА на дві складові:
Тоді рівняння (3.14) запишемо у такому вигляді


Вектор нормального прискорення апВА направлений уздовж лінії ВА від точки В до А, а його модуль
На плані прискорень а  зображено відрізком ап = а
зображено відрізком ап = а  /
/  , який прикладемо своїм початком у точці а (згідно з правилом складання векторів). Через його кінець (точку п) проведемо лінію дотичного прискорення а
, який прикладемо своїм початком у точці а (згідно з правилом складання векторів). Через його кінець (точку п) проведемо лінію дотичного прискорення а  , що направлене перпендикулярно до лінії АВ (а
, що направлене перпендикулярно до лінії АВ (а  ВА
ВА  а
а  ВА), через полюс
ВА), через полюс  - напрямок прискорення точки В (|| х-х), тоді точка перетину напрямків прискорень а
- напрямок прискорення точки В (|| х-х), тоді точка перетину напрямків прискорень а  і а
і а  визначить точку b - кінець векторів аB і а
визначить точку b - кінець векторів аB і а  . З'єднавши точки а і b, знайдемо вектор повного прискорення a
. З'єднавши точки а і b, знайдемо вектор повного прискорення a  =a
=a  +a
+a  , і цим самим побудуємо план прискорень шатуна AB.
, і цим самим побудуємо план прискорень шатуна AB.
Положення точки с на плані прискорень можна знайти методом подібності, склавши пропорцію (3.9), з якої визначають відрізок ас. Тоді прискорення точки С становить ас - (  с)
с)  а .
а .
Модуль кутового прискорення ланки 2  2 = а
2 = а  /l
/l  . Для визначення напрямку
. Для визначення напрямку  2 перенесемо вектор дотичного прискорення а
2 перенесемо вектор дотичного прискорення а  у точку В (рис. 3.6, а) і спостерігатимемо, в який бік цей вектор буде обертати шатун АВ відносно вибраного полюса (точки А). У нашому випадку кутове прискорення
у точку В (рис. 3.6, а) і спостерігатимемо, в який бік цей вектор буде обертати шатун АВ відносно вибраного полюса (точки А). У нашому випадку кутове прискорення  2 напрямлене проти руху годинникової стрілки. Отже, рух шатуна АВ в цьому положенні сповільнений, оскільки кутова швидкість W
2 напрямлене проти руху годинникової стрілки. Отже, рух шатуна АВ в цьому положенні сповільнений, оскільки кутова швидкість W  має інший напрямок.
має інший напрямок.
3.5. Приклади побудови планів швидкостей і прискорень механізмів II класу
3.5.1. Плани швидкостей і прискорень шарнірного чотириланкового механізму[18]. Як і для кривошипно-повзунного механізму, повинні бути задані кінематична схема механізму (рис. 3.7, а) і закон руху початкової ланки - кривошипа 1 (w1 =сonst).
План швидкостей.Визначимо модуль швидкості точки А: VА = w1l0А і відкладемо вектор цієї швидкості у масштабі  (
( 
 OA), попередньо вибравши відрізок ра (рис. 3.7, б). Масштаб плану швидкостей одержимо за формулою (3.7).
OA), попередньо вибравши відрізок ра (рис. 3.7, б). Масштаб плану швидкостей одержимо за формулою (3.7).

Для визначення швидкості точки В, яка одночасно належить ланкам 2 і 3, складемо векторні рівняння:
За першим рівнянням (3.16) через кінець вектора  (точка а) проведемо лінію відносної швидкості
(точка а) проведемо лінію відносної швидкості  ва точки В відносно точки А (
ва точки В відносно точки А (  ВА
ВА  АВ), а через точку р - лінію відносної швидкості
АВ), а через точку р - лінію відносної швидкості  BC точки В відносно точки С (
BC точки В відносно точки С (  ВС
ВС  ВС). Точка С, як нерухома (
ВС). Точка С, як нерухома (  с=0), потрапляє в полюс плану швидкостей, там знаходиться і точка О (
с=0), потрапляє в полюс плану швидкостей, там знаходиться і точка О (  о=0). Точка перетину ліній-напрямків швидкостей
о=0). Точка перетину ліній-напрямків швидкостей  ВА і
ВА і  вс =
вс =  B визначає точку b, а значить і величину цих векторів у масштабі
B визначає точку b, а значить і величину цих векторів у масштабі  :
:  ВА = (аb)
ВА = (аb)  ,
,  B=(р b)
B=(р b)  .
.
Швидкість точки D, яка належить ланці 2, можна встановити, використавши теорему подібності для плану швидкостей, згідно з якою можна записати такі пропорції:

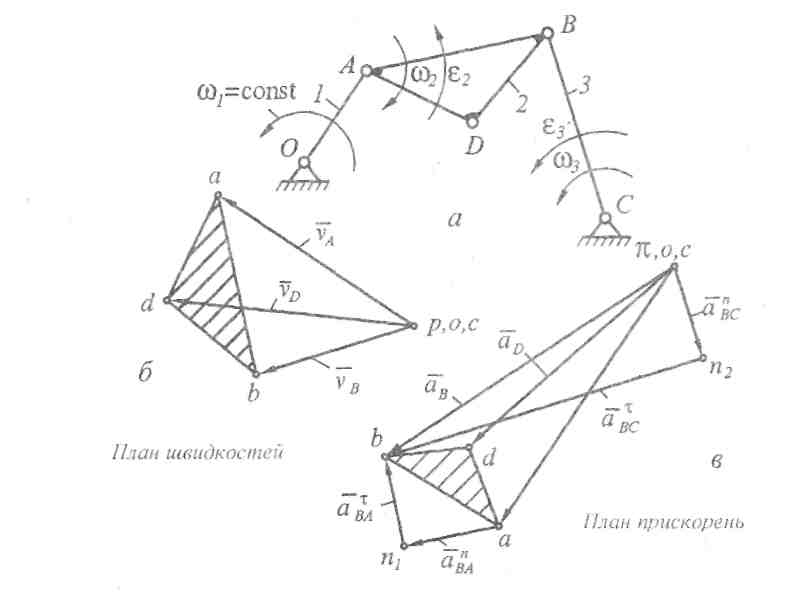
Рис. 3.7. Побудова планів швидкостей та прискорень шарнірного чотириланкового механізму:
а) кінематична схема механізму; б) план швидкостей; в) план прискорень
З цих пропорцій знайдемо відрізки:

за допомогою яких побудуємо трикутник аbd, подібний трикутнику АBD. З'єднавши точку d з полюсом р, отримаємо швидкість точки D:  = {рd)
= {рd)  . Ії можна визначити також методом векторних рівнянь, розглянувши швидкість точки D через швидкості точок А і В, тобто записавши рівняння:
. Ії можна визначити також методом векторних рівнянь, розглянувши швидкість точки D через швидкості точок А і В, тобто записавши рівняння:


Кутові швидкості ланок 2 і 3 знайдемо, використавши відносні швидкості VBA і VBC :

Щоб встановити напрямок кутової швидкості w2 , перенесемо вектор  у точку В і розглянемо рух ланки 2 відносно точки А; для кутової швидкості w3 - перенесемо вектор
у точку В і розглянемо рух ланки 2 відносно точки А; для кутової швидкості w3 - перенесемо вектор  вс також у точку В і розглянемо рух ланки 3 відносно точки С. У даному випадку w2 направлена за годинниковою стрілкою, w3 - проти руху годинникової стрілки.
вс також у точку В і розглянемо рух ланки 3 відносно точки С. У даному випадку w2 направлена за годинниковою стрілкою, w3 - проти руху годинникової стрілки.
План прискорень.Побудову плану прискорень цього механізму також розпочнемо з ланки 1. Прискорення точки А при w1 = соnst визначимо за формулою нормального прискорення: аА =  ІОА.
ІОА.
Вибравши полюс плану прискорень  (рис. 3.7, в), відкладемо від нього відрізок
(рис. 3.7, в), відкладемо від нього відрізок  , який відповідає прискоренню точки А у масштабі
, який відповідає прискоренню точки А у масштабі  (3.13). Прискорення точки А спрямоване по лінії АО від точки А до точки О (до центра обертання кривошипа).
(3.13). Прискорення точки А спрямоване по лінії АО від точки А до точки О (до центра обертання кривошипа).
Для знаходження прискорення точки В складемо два векторні рівняння:


|
Згідно з першим рівнянням системи (3.19) до кінця вектора аА потрібно прикласти початок вектора апВА нормального прискорення точки В відносно точки А, величина якого встановлюється за формулою
У вибраному масштабі цей вектор зображений відрізком  (мм). Прискорення а
(мм). Прискорення а  направлене по осі ланки АВ від точки В до точки А. Через точку
направлене по осі ланки АВ від точки В до точки А. Через точку  згідно з цим самим рівнянням необхідно провести лінію-напрямок дотичного прискорення а
згідно з цим самим рівнянням необхідно провести лінію-напрямок дотичного прискорення а  , величина останнього невідома, відомий лише його напрямок - перпендикулярно до лінії АВ.
, величина останнього невідома, відомий лише його напрямок - перпендикулярно до лінії АВ.
Розглянемо друге рівняння (3.19). Прискорення точки С дорівнює нулю, тому точка с збігається з полюсом плану. Прискорення а  =
=  ІВС і направлене від точки В до точки С. Відрізок
ІВС і направлене від точки В до точки С. Відрізок  = сп2 =
= сп2 =  який відповідає прискоренню
який відповідає прискоренню  на плані відкладаємо від точки
на плані відкладаємо від точки  . Через точку п2 проведемо лінію-напрямок дотичного прискорення
. Через точку п2 проведемо лінію-напрямок дотичного прискорення  до перетину з лінією-напрямком прискорення а
до перетину з лінією-напрямком прискорення а  . Точка перетину b цих ліній визначить величину і напрямок прискорення точки В та величини дотичних прискорень (у масштабі
. Точка перетину b цих ліній визначить величину і напрямок прискорення точки В та величини дотичних прискорень (у масштабі  .).
.).
Прискорення точки D знайдемо методом подібності, побудувавши подібний ланці АВD трикутник аbd . Відрізки ас і bd визначимо із пропорцій (3.17). Щоб знайти прискорення точки D, можна також записати векторні рівняння, виразивши прискорення точки D через прискорення точок А і В, тобто

Плани прискорень на основі рівнянь (3,20) будуються так само, як і для точки B (3.19).
Модуль кутових прискорень ланок 2 і 3 знайдемо за формулами

|
Для визначення напрямку  2 і
2 і  3 перенесемо вектори а
3 перенесемо вектори а  і а
і а  у точку В і розглянемо, в який бік ці вектори повертають відповідно ланки АВ і ВС.
у точку В і розглянемо, в який бік ці вектори повертають відповідно ланки АВ і ВС.
3.5.2. Плани швидкостей і прискорень кулісного механізму. На рис. 3.8, а зображено кінематичну схему кривошипно-кулісного механізму.
План швидкостей Швидкість обертання кривошипа приймаємо w1=const. Тоді швидкість точки А, яка належить кривошипу 1 і повзуну 2,визначається за формулою VА = w1 ІOA і спрямована перпендикулярно до лінії ОА. Відкладаємо вектор цієї швидкості у масштабі  (3.7), попередньо вибравши відрізок ра (рис. 3.8, б).
(3.7), попередньо вибравши відрізок ра (рис. 3.8, б).
Для визначення швидкості точки А3 , яка належить кулісі 3 і в даний момент збігається з точкою А, можна використати теорему про розклад складного руху повзуна 2 на два прості - переносний (обертовий) разом із кулісою 3 і відносний (поступальний) рух уздовж куліси 3. У переносному русі швидкість точки А, яка належить повзуну 2, буде дорівнювати швидкості точки А3, у відносному русі - швидкості  AA поступального руху повзуна вздовж осі куліси. На підставі цього запишемо векторне рівняння:
AA поступального руху повзуна вздовж осі куліси. На підставі цього запишемо векторне рівняння:

Крім цього, оскільки точка А3 належить кулісі 3, то можна записати друге векторне рівняння:


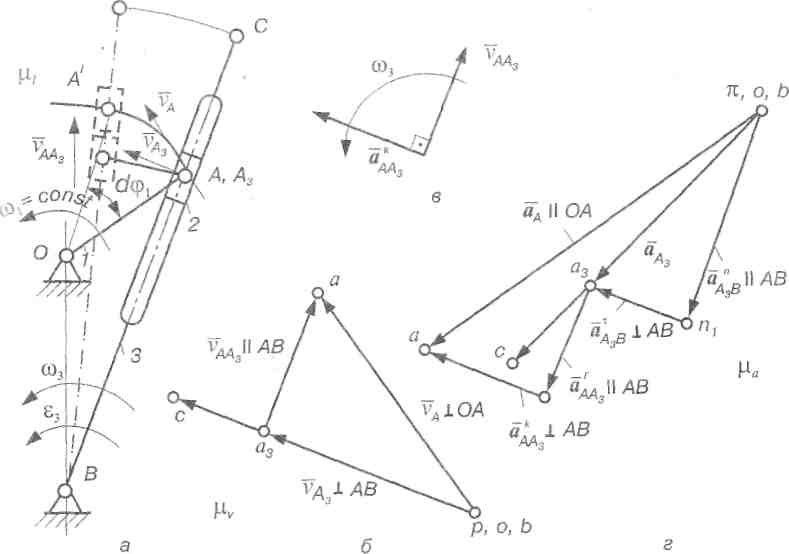
Рис. 3.8. Побудова планів швидкостей та прискорень кривошипно-кулісного механізму:
а) кінематична схема механізму; б) план швидкостей; в) напрям коріолісового прискорення;
г) план прискорень
Провівши через полюс р лінію-напрямок вектора 
 (рис.3.8, б), а через точку а - лінію-напрямок вектора
(рис.3.8, б), а через точку а - лінію-напрямок вектора  , знайдемо точку а3 перетину цих векторів. Тоді
, знайдемо точку а3 перетину цих векторів. Тоді  = (pa3 )
= (pa3 )  ,
,  =(aa3)
=(aa3)  . Напрямки швидкостей
. Напрямки швидкостей  і
і  визначаються рівнянням (3.21).
визначаються рівнянням (3.21).
Швидкість точки С, яка належить кулісі 3, можна встановити методом подібності, склавши пропорцію:
звідки маємо

Тоді швидкість точки С

Знайдемо кутові швидкості ланок. Очевидно, що

Напрямок кутової швидкості w3 можна визначити, якщо вектор швидкості точки Аз (рис. 3.8, а) прикласти в точці А3 і розглянути обертання ланки 3 навколо точки В. У даному випадку w3 напрямлена проти руху годинникової стрілки.
План прискорень. План прискорень механізму будується в такому самому порядку (рис 3.8, г). Прискорення точки A визначимо за формулою:

Вибравши полюс плану прискорень  , відкладемо від нього відрізок
, відкладемо від нього відрізок  а, який відповідає прискоренню точки А у масштабі
а, який відповідає прискоренню точки А у масштабі  (3.13). Прискорення точки А спрямоване по лінії ОА від точки А до точки О.
(3.13). Прискорення точки А спрямоване по лінії ОА від точки А до точки О.
Для визначення прискорення точки А3 використаємо теорему Коріоліса, згідно з якою, якщо переносний рух тіла обертовий(звідси відносний рух - поступальний), то абсолютне прискорення точки дорівнює векторній сумі трьох прискорень: переносного, відносного і коріолісового(поворотного). У даному випадку переносний рух (рух куліси 3) обертовий, тому можна записати:

Прискорення точки aA3 є прискорення в переносному русі повзуна 2 разом із точкою A3, повна його величина

де аB - прискорення точки В (аB = 0);  =
=  -нормальне прискорення точки А3 при обертанні куліси 3 навколо точки В, вектор якого направлений вздовж лінії А3В від точки А3 до точки В; а
-нормальне прискорення точки А3 при обертанні куліси 3 навколо точки В, вектор якого направлений вздовж лінії А3В від точки А3 до точки В; а  - дотичне прискорення точки А3 при обертанні куліси 3 навколо точки В.
- дотичне прискорення точки А3 при обертанні куліси 3 навколо точки В.
Відносне (релятивне) прискорення  направлене вздовж осі куліси АзВ. Його величина (модуль) - невідома.
направлене вздовж осі куліси АзВ. Його величина (модуль) - невідома.
Модуль прискорення Коріоліса визначається за формулою (для плоского руху)

Щоб знайти його напрямок необхідно вектор відносної швидкості  (рис. 3.8, в) повернути на 90° у бік переносної кутової швидкості.
(рис. 3.8, в) повернути на 90° у бік переносної кутової швидкості.
Підставивши (3.25) у (3.24), одержимо

На основі рівняння (3.27) побудуємо план прискорень механізму. З точки  відкладемо відрізок
відкладемо відрізок  який у масштабі
який у масштабі  а визначає вектор прискорення апАB, а через точку n1 проведемо лінію-напрямок дотичного прискорення а
а визначає вектор прискорення апАB, а через точку n1 проведемо лінію-напрямок дотичного прискорення а  . Оскільки величини прискорень
. Оскільки величини прискорень  і
і  невідомі, побудову планів прискорень продовжимо з кінця векторного рівняння, приклавши вектор а
невідомі, побудову планів прискорень продовжимо з кінця векторного рівняння, приклавши вектор а  своїм кінцем у точку а (відрізок kа =
своїм кінцем у точку а (відрізок kа =  ), а через початок цього вектора проведемо лінію-напрямок вектора а
), а через початок цього вектора проведемо лінію-напрямок вектора а  до перетину з вектором а
до перетину з вектором а  . точка a3 перетину яких визначить величину повного прискорення аА3, а також невідомих складових а
. точка a3 перетину яких визначить величину повного прискорення аА3, а також невідомих складових а  і
і  напрямки яких одержимо за (3.27). Положення точки с на плані прискорень отримаємо методом подібності, використавши рівняння (3.23), у яке замість точки p підставимо
напрямки яких одержимо за (3.27). Положення точки с на плані прискорень отримаємо методом подібності, використавши рівняння (3.23), у яке замість точки p підставимо  , тоді ас = (
, тоді ас = (  с)
с)  а.
а.
Модуль кутового прискорення ланки 3  3 =
3 =  2 знайдемо за формулою
2 знайдемо за формулою  Щоб встановити його напрямок, вектор
Щоб встановити його напрямок, вектор  перенесемо в точку А3 і будемо спостерігати обертання ланка 3 навколо точки В. У даному випадку кутове прискорення
перенесемо в точку А3 і будемо спостерігати обертання ланка 3 навколо точки В. У даному випадку кутове прискорення  3 буде направлене проти руху годинникової стрілки.
3 буде направлене проти руху годинникової стрілки.
При побудові планів швидкостей і прискорень кулісних механізмів, як правило, вибирають за переносне середовище не кулісу 3, а повзун 2. У такому випадку рівняння (3.21), (3.22), (3.24) і (3.25) набувають вигляду:


3.5.3. Плани швидкостей і прискорень шарнірного шестиланкового механізму. Як і для інших механізмів, повинні бути задані кінематична схема механізму (рис. 3.9, а) та закон руху початкової ланки - кривошипа 1 (w1=соnst).
План швидкостей. Швидкість точки А  а =
а =  . Вибравши масштаб плану швидкостей
. Вибравши масштаб плану швидкостей  (3.7), визначаємо величину відрізка ра, який на плані швидкостей (рис. 3.9, б) показує цей вектор
(3.7), визначаємо величину відрізка ра, який на плані швидкостей (рис. 3.9, б) показує цей вектор  .
.
Для знаходження швидкості точки В записуємо векторні рівняння:

На основі цих рівнянь будуємо план швидкостей, з якого знаходимо швидкості  ,
,  . Швидкість точки О знаходимо методом подібності, складаючи пропорцію
. Швидкість точки О знаходимо методом подібності, складаючи пропорцію










