Ланки та кінематичні пари . Класифікація кінематичних пар
Структура та класифікація механізмів
Структура механізму - це його будова. Будовою механізму визначаються такі його важливі характеристики, як види виконуваних рухів, способи їх перетворення, число ступенів вільності.
Основними структурними елементами механізму є ланки (тверді тіла) та кінематичні пари (рухомі з’єднання твердих тіл). Тобто, з точки зору ТММ, будь-який механізм чи машина складаються лише з ланок, які з’єднані між собою кінематичними парами.
Ланки та кінематичні пари . Класифікація кінематичних пар
Усі механізми та машини складаються з окремих деталей.Нагадаємо, деталь - це виріб, виготовлений без застосування складальних операцій, як правило, з цілого шматка матеріалу (або з окремих частин зварюванням), тому не може бути розібрана на простіші без руйнування.
Під час роботи машини існують деталі, які рухаються як одне ціле відносно інших деталей. Тому в ТММ має місце таке поняття як ланка.
Одна деталь або сукупність декількох деталей, які утворюють одну жорстку систему тіл і не мають рухів одне відносно іншого, представляють собою ланку. Отже, кожна ланка може складатись з однієї або декількох деталей, що утворюють нерухомі з’єднання. Найчастіше зустрічається таке визначення ланки. Тверді тіла, з яких складається механізм, називаються ланками. При цьому маються на увазі як абсолютно тверді, так і деформівні та гнучкі тіла. Рідини та гази в ТММ ланками не вважаються. Для прикладу розглянемо шатун двигуна внутрішнього згоряння (рис. 1.1, а, б, ланка 2). Це одна ланка, яка представляє собою сукупність декількох деталей (рис. 1.1, в: тіло шатуна 1, втулка 2, вкладки 3, 4, рознімна головка 5, болти 6, гайки, контргайки, шайби, шплінти - 7), з’єднаних в одну геометричну незмінну систему. Оскільки всі ці деталі не мають між собою відносних рухів, утворюють одну жорстку систему тіл, і рухаються як одне ціле, то всі вони представляють собою одну ланку.
Ланки механізму рухомо з’єднані між собою. Рухоме з’єднання двох ланок, що дотикаються, називають кінематичною парою.
Точки, лінії, поверхні ланки, якими вона стикається (з’єднується) з іншою ланкою, утворюючи кінематичну пару, називають елементами кінематичної пари. Кінематична пара при взаємодії елементів допускає відносний рух ланок.
Для того, щоб елементи кінематичної пари перебували у постійному дотику (ланки в механізмі повинні бути постійно з’єднані між собою), пара повинна бути замкнена.
За характером замикання кінематичні пари поділяють на пари з силовим (за рахунок сил ваги, пружності, тиску рідини, газу і т.ін.) та геометричним (за рахунок конструктивних форм ланки) замиканням.
Класифікація кінематичних пар. За характером з’єднання ланок кінематичні пари поділяють на дві групи: нижчі та вищі. До нижчих відносяться пари, у яких ланки стикаються по поверхні, а до вищих - якщо елементами кінематичної пари є тільки лінії або точки. При цьому лінійний або точковий контакт розуміють як початковий – при дотиканні ланок без зусиль, а під навантаженням ланки, які утворюють вищу пару, будуть дотикатись по деякій дійсній поверхні, яка називається плямою контакту.
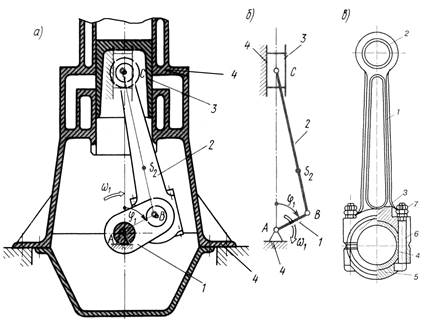
Рис. 1.1
Кінематичні пари класифікують за числом (S) умов зв’язку (обмежень), якінакладає пара на рух однієї ланки відносно іншої , рідше - за числом (H) ступенів вільності у відносному русі ланок. Число ступенів вільності у відносному русі ланок визначає вид пари за рухомістю. Розрізняють кінематичні пари одно-, дво-, три-, чотири-, і пятирухомі.
Числом ступенів вільності механічної системи називають число незалежних її можливих переміщень.
В загальному випадку для абсолютно твердого тіла, що вільно рухається в просторі, число ступенів вільності дорівнює шести. Рух такого тіла можна уявити як обертання навколо та ковзання вздовж трьох довільно взятих взаємно перпендикулярних координатних осей (незалежно і одночасно). При плоскому русі тіло матиме три ступені вільності.
Отже, вільне в просторі тіло має шість ступенів вільності, тобто Н=6. Це означає, що на рух вільного тіла не накладено ніяких обмежень.
Як вже було сказано, в механізмі вільних (не зв’язаних між собою) ланок немає. Кінематичні пари накладають обмеження на рух ланок, ”змушують” їх рухатись певним чином, виконувати потрібні, задані рухи. Або, інакше, для того, щоб ланка механізму рухалась певним чином, її рух необхідно обмежити кінематичною парою.
Входження ланки в кінематичну пару з іншою ланкою накладає на їх відносний рух певні обмеження - умови зв’язку (в’язі) S.
Очевидно, що число цих умов зв’язку не може бути більшим п’яти, інакше кінематична пара стане жорстким з’єднанням двох ланок, тобто вони утворять одну ланку. Так само не може бути кінематичної пари, яка не накладає жодного зв’язку, бо при цьому матимемо дві вільні ланки.
Отже, число S умов зв’язку, що накладають кінематичні пари на відносний рух ланок, може змінюватися в межах від 1 до 5, тобто  S
S  . Число ступенів вільності ланки, що входить до кінематичної пари, дорівнює Н=6–S.
. Число ступенів вільності ланки, що входить до кінематичної пари, дорівнює Н=6–S.
Клас кінематичної пари визначається числом умов зв’язку; його можна знайти з рівності S = 6 – H.
Номер класу пари збігається з числом S умов зв’язку. Оскільки число умов зв’язку може змінюватися в межах від 1 до 5, то число класів кінематичних пар дорівнює п’яти.
На рис. 1.2 наведено основні види кінематичних пар, їх схеми та умовне позначення згідно рекомендацій міжнародних стандартів, стосовно структурних та кінематичних схем. Відзначимо, що тут наведено принципове зображення кінематичних пар, а конструктивні виконання можуть бути різними.
Найбільше застосування в механізмах машин, приладах та інших пристроях отримали обертові кінематичні пари V класу.
Обертова пара (рис. 1.2, а) – однорухома, допускає лише один відносний обертовий рух однієї ланки навколо іншої, тобто число ступенів вільності Н=1; на відносний рух ланки накладено S=6–H=5 умов зв’язку (в’язей). Отже, це кінематична пара п’ятого класу. Елементи обертової пари – це циліндричні поверхні (ланки 1 та 2 дотикаються по циліндричній поверхні); нижча пара замкнена геометрично.
Поступальна пара (рис. 1.2, б) – однорухома, допускає лише прямолінійний поступальний відносний рух ланок, тобто Н=1 S=5; отже, це кінематична пара V класу, нижча, з геометричним замиканням. Відомим прикладом конструктивного виконання такої кінематичної пари є пара поршень - циліндр двигуна внутрішнього згоряння, поршневої помпи, компресора і т.ін.
Відзначимо, що кінематичні пари V класу зустрічаються в трьох варіантах. Крім названих, обертової та поступальної, до V класу відносять також кінематичну пару гвинт – гайка (рис. 1.2, в), оскільки одна ланка відносно іншої має тільки один незалежний рух (обертання навколо і поступальний рух вздовж осі гвинта взаємопов’язані між собою).
IVклас. Циліндрична пара (рис. 1.2, г) – дворухома кінематична пара, допускає незалежні обертовий та поступальний відносні рухи ланок, тобто Н=2, а S=4, отже, це IV клас пари. Пара нижча (ланки дотикаються по циліндричній поверхні) з геометричним замиканням.
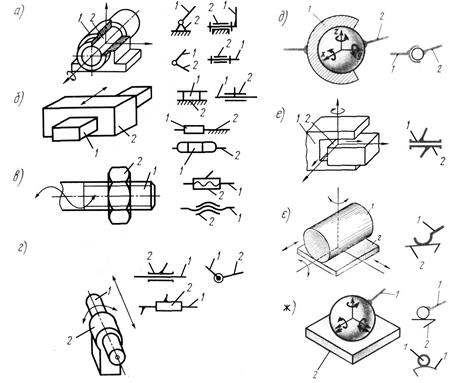
Рис. 1.2
ІІІ клас. Сферична пара (кульковий шарнір, рис. 1.2, д), площинна пара (рис. 1.2, е) – трирухомі кінематичні пари. Рух однієї ланки відносно іншої зводиться до трьох незалежних відносних рухів (показано стрілками); Н=3, S=3, тобто пари ІІІ класу; пари нижчі, з геометричним замиканням.
ІІ клас. Лінійна пара. Наведена варіантом “циліндр-площина” (рис. 1.2, є). Чотирирухома кінематична пара; можливі незалежні відносні рухи ланок (обертові та поступальні) показані стрілками; тобто Н = 4, S = 2, ІІ клас. Це вища пара, тому що контакт елементів ланок лінійний.
І клас. Точкова пара (рис. 1.2, ж). П’ятирухома кінематична пара, що являє собою кулю 1, яка перекочується з ковзанням по площині 2. Куля може здійснювати п’ять простих незалежних рухів; Н=5, а S =1. Рух кулі відносно площини може бути розкладений на три обертові рухи навколо осей x, y, z та ковзання вздовж двох осей x, y. Рух кулі вздовж вертикальної осі неможливий, тому що до низу він обмежений площиною, а при русі в протилежному напрямку порушується дотик ланок і кінематична пара перестане існувати. В даній кінематичній парі має бути передбачене силове замикання. Пара – вища, оскільки ланки дотикаються у точці. Зазначимо, в загальному випадку пари I класу одержують при лінійному дотику двох поверхонь, а II класу – при точковому.
Як бачимо, щоб визначити клас кінематичної пари, треба одну з ланок умовно прийняти за нерухому, зв’язати з нею просторову систему координат та порахувати можливі незалежні рухи іншої ланки, Н (або порахувати накладені умови зв’язку, тобто обмеження на можливі прості рухи ланки, S). Клас кінематичної пари знаходимо з рівності S = 6-Н.
Відмітимо, що в плоских механізмах можуть бути лише кінематичні пари ІV та V класів.
Відзначимо, що перевагою нижчих кінематичних пар, у порівнянні з вищими, є можливість передачі великих зусиль. Дія сил у нижчих парах розподіляється на більшу площу, у зв’язку з чим питомий тиск і стирання суттєво менші. Такі кінематичні пари є технологічнішими. Перевагою вищих пар є можливість відтворення самих найрізноманітніших законів руху вихідної ланки та зменшення тертя при застосуванні кінематичних з’єднань.
Кінематичні з’єднання.Необхідно відмітити, що відносна рухомість ланок, що з’єднуються, може бути забезпечена також кінематичними з’єднаннями. Кінематичні з’єднання є аналогами кінематичних пар. Кінематичний ланцюг, що конструктивно замінює у механізмі кінематичну пару, називається кінематичним з’єднанням. Кінематичне з’єднання може складатися з декількох ланок та кінематичних пар, але тільки дві ланки з’єднання можуть бути з’єднані з іншими ланками механізму.
Прикладами кінематичних з’єднань можуть бути кулькова вальниця, кульково-ґвинтові передачі, роликові напрямні та інші (замінюють, відповідно, обертові, ґвинтові та поступальні кінематичні пари). Застосування кінематичних з’єднань замість кінематичних пар дозволяє зменшити втрати на тертя, підвищити тримкість , спростити технологію виготовлення.
Структурні та кінематичні схеми механізмів. При зображенні механізму на кресленні, розрізняють його структурну схему із застосуванням умовних позначень ланок і кінематичних пар (без дотримання масштабу) і кінематичну схему, яка є його кінематичною моделлю.
Структурна схема містить загальну інформацію про механізм: про кількість ланок та кінематичних пар, послідовність, способи з’єднання ланок та види можливих рухів.
Кінематична схема механізму будується у вибраному масштабі з точним дотриманням всіх розмірів і форм, від яких залежить рух тієї чи іншої ланки. На кінематичній схемі повинно бути вказане все, що є необхідним для вивчення руху. Все зайве, що не впливає на рух, має бути вилучене, щоб не ускладнювати креслення.
На схемах ланки позначають арабськими цифрами 0, 1, 2, 3,…, а кінематичні пари і різні точки ланок (наприклад, центри ваг) – латинськими літерами А, В, С, S2 … (рис. 1.1, б).
Ланки розрізняють за конструктивними ознаками (корпус двигуна, колінчастий вал, шатун, поршень, зубчасте колесо і т.п.), але в ТММ найчастіше – залежно від характеру їхнього відносного руху. Наприклад: кривошип - ланка механізму, яка здійснює повний оберт навколо нерухомої осі (рис. 1.1, ланка 1); коромисло - ланка, яка здійснює коливальний рух; повзун - ланка, що здійснює поступальний прямолінійний рух (3); шатун - ланка важільного механізму, що здійснює плоскопаралельний рух (2); куліса - рухома ланка, яка є напрямною повзуна.
В кожному механізмі є одна нерухома ланка (або ланка, що приймається за нерухому) та одна чи декілька рухомих ланок. Нерухому ланку механізму називають стояком. Наприклад, у механізмі двигуна внутрішнього згоряння – блок двигуна, картер, головка циліндрів, циліндри, вальниці колінчастого вала і т.ін. утворюють в сукупності одну нерухому ланку – стояк (рис. 1.1, ланка 4). Стояк на схемі механізму позначають штриховкою. Поняття нерухомої ланки для транспортних машин умовне. Стояк – це ланка, відносно якої визначають рух усіх інших ланок механізму.
Згідно визначення, у будь-якому механізмі є ланка (або декілька), рух якої є заданим. Ланка, якій задається рух, що перетворюється у потрібні рухи інших ланок називається вхідною. На схемах її позначають дугою зі стрілкою (рис. 1.1, ланка 1). В деяких випадках застосовують терміни – ведуча ланка, початкова ланка. Якщо ланці приписується одна чи декілька узагальнених координат, то вона називається початковою. Ведуча ланка – ланка для якої елементарна робота зовнішніх сил, прикладених до неї, є додатна; якщо робота від’ємна, або дорівнює нулю – ведена. Ланка механізму, яка здійснює потрібний рух, для виконання якого призначено механізм, називається вихідною. Переважно у механізмі одна вхідна і одна вихідна ланки (механізм з одним ступенем вільності). Інші рухомі ланки – з’єднувальні, або проміжні. Вхідній ланці механізму з одним ступенем вільності переважно присвоюють номер 1, а вихідній номер n, проміжним ланкам порядкові номери: 2, 3, ..., n-1. Вхідна ланка отримує рух від двигуна, а вихідна з’єднується з робочим органом машини.
Дата добавления: 2016-07-22; просмотров: 8145;
Поиск по сайту
Узнать еще
- A. Трубопроводная обвязка окружения испарителя.
- H – параметры транзистора
- H-параметры транзистора
- H-параметры транзистора, включенного по схеме с ОБ.
- H-параметры транзистора, включенного по схеме с ОЭ.
- I. Двигатель параллельным возбуждением
- I. Поверхностный аппарат клетки.
- I. Понятие и типы политических партий.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
