Механический электропривод
Общие сведения
Большинство современных технологических машин как в сельскохозяйственной промышленности, так и в других отраслях проектируют и создают по схеме: энергетическая машина, передаточный механизм, исполнительный орган машины, система управления (рис. 1.1)
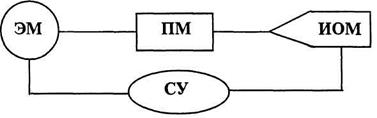 |
Устройство, состоящее из двигателя, передаточных механизмов и системы управления для приведения в движение машин и механизмов называется приводом.
Рисунок 1.1 — Принципиальная схема механического привода
Угловые скорости двигателя  дв и исполнительного органа машины
дв и исполнительного органа машины  ном, как правило, не равны. Электротехническая промышленность для общемашиностроительного применения выпускает электродвигатели с синхронной частотой вращения пс = 3000 мин-1, пс = 1500 мин-1, пс = 1000 мин-1 и пс = 750 мин-1. Рабочие органы технологических машин функционируют при очень большом разнообразии угловых скоростей. Для решения этих противоречий применяют приводы. Ключевым звеном привода является передача.
ном, как правило, не равны. Электротехническая промышленность для общемашиностроительного применения выпускает электродвигатели с синхронной частотой вращения пс = 3000 мин-1, пс = 1500 мин-1, пс = 1000 мин-1 и пс = 750 мин-1. Рабочие органы технологических машин функционируют при очень большом разнообразии угловых скоростей. Для решения этих противоречий применяют приводы. Ключевым звеном привода является передача.
Передачами в машинах называются устройства, служащие для передачи энергии механического движения на расстояние и преобразования его параметров. Общее назначение передач совмещается с выполнением частных функций, к числу которых относятся: распределение энергии, понижение или повышение скорости, преобразование видов движения (например, вращательного в поступательное или наоборот), регулирование скорости, пуск, остановки и реверсирование. Наиболее широкое распространение в технике получило вращательное движение, так как оно может быть осуществлено наиболее простыми способами.
Передачи используются как для понижения (редукции), так и для повышения угловой скорости двигателя до заданной угловой скорости рабочего звена (органа) машины. В зубчатых передачах первые, называются редукторами, а вторые — мультипликаторами.
Необходимость применения передач, располагаемых между двигателем и исполнительным органом машины (по пути следования энергии), обусловлена следующими причинами: а) скорости движения исполнительных органов машины чаще всего отличны от скоростей стандартных двигателей; б) в процессе эксплуатации машины необходимо регулировать скорости исполнительного органа и соответственно вращающие моменты вероятнее всего в пределах, не осуществляемых непосредственно двигателем из-за неэкономичности или невозможности; в) характер и законы движения, обеспечиваемые двигателем, отличаются от предусматриваемых для исполнительного органа; г) одним двигателем необходимо привести в движение несколько исполнительных органов с различными скоростями; д) непосредственно из-за больших расстояний между двигателем и исполнительным органом или по соображениям безопасности, удобства обслуживания или габаритов машины.
По способу передачи движения от ведущего вала к ведомому различают передачи трением и зацеплением, непосредственного касания (фрикционные, зубчатые, червячные, глобоидные, гипоидные, волновые, винтовые) и с гибкой связью (ременные, зубчатоременные, цепные); по назначению — кинематические и силовые; по характеру изменения передаточного отношения — с постоянным и изменяющимся передаточным отношением (ступенчато и бесступенчато); по относительному движению валов — обыкновенные и сателитные; по взаимному расположению валов в пространстве — между параллельными, пересекающимися, перекрещиваю-щимися и соосными осями валов. Выбор того или иного типа передачи обуславливается габаритами, массой и компоновочной схемой машины, режимом ее работы, частотой и направлением вращения ведущего и ведомого валов, пределами и условиями регулирования их скорости.
Правильный выбор типа привода, кинематической схемы, вида и материала трущихся пар, применение подшипников качения, совершенной системы смазывания — все это является чрезвычайно важным с точки зрения повышения КПД машины и механизма.
 |
1.5.2 Кинематические и силовые соотношения в передачах
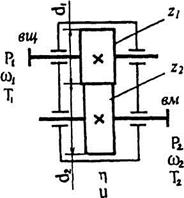
Рисунок 1.2 — Обозначение основных параметров передачи
Любая передача (рис. 1.2) состоит из ведущего (вщ1) и ведомого (вм2) звеньев. Передачу характеризуют следующие основные и производные параметры: мощность Р(кВт), угловая скорость  (с
(с  1) или частота вращения п (мин-1), момент вращения T(Н·м), коэффициент полезного действия (КПД)
1) или частота вращения п (мин-1), момент вращения T(Н·м), коэффициент полезного действия (КПД)  и передаточное отношение и.
и передаточное отношение и.
Важнейшей характеристикой любой механической передачи является передаточное отношение, которое показывает, во сколько раз угловая скорость ω (или частота вращения п) одного звена больше или меньше угловой скорости (частоты вращения) другой передачи. Передаточное отношение, определяемое в направлении потока мощности от ведущего звена 1 к ведомому 2, имеет вид:
 (1.2)
(1.2)
При значении и >1 такие передачи называют понижающими, процесс преобразования частоты вращения — редуцированием, а передачу, выполненную в закрытом корпусе — редуктором.
Передаточное отношение можно выразить через диаметры, или число зубьев, тогда формула будет иметь вид:
 u12 =
u12 =  1 /
1 /  2 = n1 / n2 = d2 / d1 = z2 / z1 (1.3)
2 = n1 / n2 = d2 / d1 = z2 / z1 (1.3)
Если кинематическая характеристика выражается отношением числа зубьев, то это называют передаточным числом.
Передаточное число в отличие от передаточного отношения всегда положительное и не может быть меньше единицы.
Так как нами рассматриваются только понижающие передачи, то передаточное отношение и передаточное число будут иметь значения больше единицы — обе эти характеристики механических передач будем обозначать символом и.
Привод может включать несколько передаточных механизмов (ступеней). При этом значение общего передаточного отношения определяется произведением передаточных отношений отдельных кинематических ступеней привода.
При разбивке общего передаточного отношения следует руководствоваться кинематическими возможностями отдельных передач (см. табл. 1.1). Заметим, что в этой таблице приведены рекомендуемые интервалы передаточных чисел. Что же касается редукторов, то их значения следует принимать стандартными. Сравнительная характеристика передач приведена в табл. 1.2.
Если к ведущему валу передачи подвести мощность Р  , то с ведомого можно будет отобрать мощность Р2, которая несколько меньше затраченной Р (следствие потерь на трение и другие сопротивления). Эти потери выражаются коэффициентом полезного действия:
, то с ведомого можно будет отобрать мощность Р2, которая несколько меньше затраченной Р (следствие потерь на трение и другие сопротивления). Эти потери выражаются коэффициентом полезного действия:
= Р2 / P1 (1.5)
Поскольку P = T  и = (
и = (  n ) / 30,
n ) / 30,
то = P2 / P1 = T2. 2 / T1 1 = T2 n2 / T1 n1 = T2 / T1 u12. (1.6)
Значения КПД передач см. табл. 1.1. В силовой (понижающей) передаче
 , T2
, T2  T1, T2=T1 u12
T1, T2=T1 u12
Таблица 1.1
Ориентировочные знания основных параметров одноступенчатых
механических передач
| Передачи | Передаточное отношение и | КПД,
| Передаваемая мощность Р, кВт | Относительные габаритные размеры | Относительная масса | Относительная стоимость | |
| Зубчатые: | |||||||
| · цилиндрические | До 6,3 | 0,97.... | Не ограничена | ||||
| · конические | До 6,3 | 0,95–97 | 1,2–1 | 1,7... | 2,2 | ||
| · планетарные А 31h | 3–9 | 0,95–0,97 | 0,7–1 | 0,93–0,73 | 1,5 … … | 1,25 | |
| · планетарные В 31h | 7–16 | 0,94–0,96 | 0,8–1,1 | 0,95–0,8 | 1,6 ...… | …1,3 | |
| · волновые u 2h1 | 80–315 | 0,7–0,9 | 0,5–0,6 | 0,05–0,15 | 1,7 … | …1,5 | |
| Червячная при числе заходов червяка: | |||||||
| Z1 = 4 | 8–14 | 0,8–0,9 | |||||
| Z1 = 2 | 14–30 | 0,75–0,85 0,85 | 1–1,6 | 1,04 | 1,55 | …1,4 | |
| Z1=1 | 30–80 | 0,7–0,8 | |||||
| Цепные | До 10 | 0,92–0,95 | 1–1,6 | 0,25 | 0,35 | …0,2 | |
| Ременные (трением) | До 8 | 0,94–0,96 0,96 | 5–4 | 0,4–0,5 | 0,3 | …0,2 | |
| Зубчато-ременные | До 12 | 0,96–0,98 | 2,5–3 | 0,3 | 0,8 | …0,2 | |
| Фрикционные | До 7 | 0,85–0,95 | 1,5–2 | 1,5 | |||
| Муфта соединительная | 0,98 | ||||||
| Подшипники качения (одна пара) | 0,99 |
Примечания
1. Относительные габаритные размеры, масса и стоимость определяются по отношению к одноступенчатой зубчатой передаче.
2. Передаточные отношения и редукторов надо выбирать из единого ряда (допускаемое отклонение от номинального значения и ± 4%): 1, 1,12; 1,25, 1,4; 1,6, 1,8; 2; 2,24; 2,5, 2,8; 3,15, 3,55; 4, 4,5; 5; 5,6, 6,3; 7,1; 8; 9; 10; 11,2; 12,5; 14; 16; 18, 20; 22,4; 25; 28; 31,5; 35,5; 40; 45; 50; 56, 63; 71, 80; 90; 100, 112, 125; 140, 160; 180; 200; 224; 250; 280; 315, 355;
В идеальной передаче (без потерь) изменение частоты вращения или угловой скорости обратно пропорционально изменению моментов вращения.
Окружная скорость v ведущего или ведомого звена (м/с)
v = d / 2 или v = dn /60, (1.7)
где — угловая скорость, с-1;
d — диаметр шкива, колеса, звездочки, червяка (мм);
п — частота вращения, об/мин (мин-1).
Окружная сила передачи  (H):
(H):
= P/v = 2T/ d,(1.8)
где P — мощность (Вт).
Момент вращения Т (Н∙м)
T = Ft d /2 =P / . (1.9)
Момент вращения ведущего вала Т1 является моментом движущих сил и его направление совпадает с направлением вращения вала. Момент ведомого вала Т2 — момент силы сопротивления, его направление противоположно направлению вращения вала.
Если частота вращения ведомого вала не задана в явной форме, то ее находят через другие заданные параметры привода. Так, при заданных скорости ленты (цепи) v конвейера (м/с) и диаметре D барабана (звездочки) (мм):
 . (1.10)
. (1.10)
Если заданы шаг тяговой цепи t (мм) и число зубьев звездочки z, то сначала определяют диаметр делительной окружности звездочки:
dД = t / sin (180°/z) , (1.11)
затем по формуле (1.10) частоту вращения ведомого вала. Требуемая мощность
PЭД = PT /ηобщ , (1.12)
где  общ — общий КПД привода, равный произведению частных КПД отдельных передач, составляющих привод:
общ — общий КПД привода, равный произведению частных КПД отдельных передач, составляющих привод:
общ = 12 23 … n (1.13)
Таблица 1.2
| Тип передачи | Преимущества | Недостатки |
| Зубчатая: · цилиндрическая · и коническая | Высокий КПД Постоянство передаточного отношения | Малое передаточное отношение Шум при работе |
| Червячная | Большое передаточное число Возможность самоторможения | Низкий КПД Использование цветных металлов |
| Планетарная зубчатая | Плавность,бесшумность Малые габариты и масса | Большое число деталей Сложность сборки Большая точность изготовления |
| Волновая зубчатая | Большое передаточное число. Малые масса и габариты Возможность передачи движения в герметичное пространство Высокая демпфирующая способность | Высокое качество материала колеса Ограниченная частота вращения ведущего вала генератора волн деформации во избежание усталостного разрушения гибкого колеса |
| Винт-гайка с трением качения | Высокий КПД (до 0,9) | Сложность изготовления Требование хорошей защиты от загрязнения Необеспеченность точного и постоянного передаточного отношения |
Преимущества и недостатки основных типов передач
Если в техническом задании мощность на ведомом валу задана не в явной форме, например указаны тяговая сила F и скорость v ленты конвейера, то:
PT = Fν (1.14)
где Pт — в Вт; F— в Н; v — в м/с.
При расчете привода часто используют следующие зависимости между различными параметрами:
1) выражение угловой скорости (с-1) через частоту вращения п (мин-1):
= n /30, (1.15)
2) выражение вращающего момента Т (Н·м) через мощность Р (Вт) и частоту вращения п (мин-1):
T = 9,55P/n, (1.16)
3) связь между моментами на ведущем Tб и ведомом ТT валах передачи через передаточное число и и КПД :
ТТ = Тб u . (1.17)
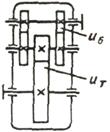
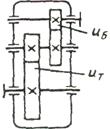
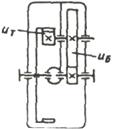
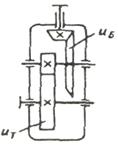
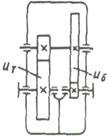
Для двухступенчатого редуктора:
uред= uбuТ (1.18)
где uб и uт — передаточные числа быстроходной и тихоходной ступеней редуктора (коробки передач).
Передаточные числа uб быстроходной и иТ тихоходной ступеней двухступенчатых редукторов определяют по соотношениям, приведенным в табл. 1.3.
Таблица 1.3
Разбивка общего передаточного числа двухступенчатого редуктора
| Схема редуктора | Передаточное число | Схема редуктора | Передаточное число | ||
| иб | ит | иб | ит | ||
| иред/ит |

| 
| 
| иред/иб |
| иред/ит | 
| |||
| иред/ит | 
| Планетарные двухступенчатые редукторы:
 иред свыше 25
до 63
иред свыше 63
иред свыше 25
до 63
иред свыше 63
| иред/6,3 | иред/4 6,3 0,1 иред |
Дата добавления: 2020-02-05; просмотров: 854;
Поиск по сайту
Узнать еще
- Алгоритм моделирования системы электропривода по методу структурных схем
- Алгоритм моделирования системы электропривода по методу уравнений состояния
- Анализ результатов функционального синтеза системы электропривода
- Аналитический метод исследования переходных процессов электропривода на базе математической модели двигателя постоянного тока
- Асинхронные электродвигатели с фазным ротором в крановых электроприводах
- Асинхронный двигатель для параметрического электропривода
- Асинхронный электропривод на основе ПЧ с АИН и управляемым выпрямителем
- Асинхронный электропривод на основе ПЧ с АИН с широтно-импульсной модуляцией

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
