Редукторы, мотор-редукторы и вариаторы
Классификация. Редуктор служит для уменьшения частоты вращения и соответствующего увеличения вращающего момента. В корпусе редуктора размещены одна или несколько передач зацеплением с постоянным передаточным отношением.
Редуктор общемашиностроительного применения — редуктор, выполненный в виде самостоятельного агрегата, предназначенный для привода различных машин и механизмов и удовлетворяющий комплексу технических требований.
Редукторы общемашиностроительного применения, несмотря на конструктивные различия, близки по основным технико-экономическим характеристикам: невысокие окружные скорости, средние требования к надёжности, точности и металлоемкости при повышенных требованиях по трудоемкости изготовления и себестоимости. Это их отличает от специальных редукторов (авиационных, судовых, автомобильных и др.), выполненных с учетом специфических требований, характерных для отдельных отраслей сельского хозяйства.
В соответствии с ГОСТ 29076–91 редукторы и мотор-редукторы общемашиностроительного применения классифицируют в зависимости от:
2 вида применяемых передач, числа ступеней и взаимного расположения
осей входного и выходного валов,
3 взаимного расположения геометрических осей входного и выходного
валов в пространстве (горизонтальное и вертикальное),
1 способа крепления редуктора (на приставных лапах или на плите,
фланец со стороны входного/выходного вала насадкой);
2 расположения оси выходного вала относительно плоскости основания
и оси входного вала (боковое, нижнее, верхнее) и числа входных и
выходных концов валов.
Цифровое условное обозначение по ГОСТ 20373–94 варианта сборки редуктора характеризует взаимное расположение выходных концов валов, их количество и должно входить в условное обозначение изделия.
Важнейший характеристический размер, в основном определяющий нагрузочную способность, габариты и массу редуктора называют главным параметром редуктора. Главный параметр цилиндрических, червячных и глобоидных редукторов — межосевое расстояние aw тихоходной ступени, планетарных — радиус r водила, конических — номинальный внешний делительный диаметр de2 колеса, волновых — внутренний диаметр d2 гибкого колеса.
Реальный диапазон передаточных отношений (чисел) редукторов — от 1 до 1000. Значения передаточных отношений должны соответствовать ряду R20 предпочтительных чисел (ГОСТ 8032–84).
Основная энергетическая характеристика редуктора — номинальный момент Tном, представляющий собой допустимый вращающий момент на его тихоходном (ведомом) валу при постоянной нагрузке.
Критерием технического уровня редуктора служит относительная масса Y = т/Т, где т — масса редуктора, кг; Т — вращающий момент, Н∙м.
Тип редуктора, параметры и конструкцию определяют в зависимости от его места в силовой цепи машины, передаваемой мощности, частоты вращения, назначения машины и условий ее эксплуатации.
При проектировании назначенного типа редуктора за исходные принимают следующие данные: передаточное отношение, вращающий момент на тихоходном валу, частоту вращения быстроходного вала, режим нагружения, необходимую долговечность, технологические возможности завода-изготовителя (имеющиеся материалы, типы заготовок, виды проводимых термической и термохимической обработок).
К определяющим параметрам относят межосевые расстояния, внешние делительные диаметры конических колес, радиусы водил или делительные диаметры центральных колес с внутренними зубьями в планетарных передачах, ширину колес, модули и передаточные отношения, коэффициенты, диаметры червяка и число винтов червяка (для червячных передач). Главным параметром редуктора является один из его основных параметров (табл. 1.5).
Таблица 1.5
Стандартизованные основные параметры передач
| Параметр | Обозначение | Стандарт |
| Колеса зубчатые модуль | u | ГОСТ 9563-60 |
| Передачи зубчатые цилиндрические | ГОСТ 2185-66 | |
| межосевые расстояние | аw | |
| номинальное передаточное число | uном | |
| коэффициент ширины колес |  ba ba
| |
| Колеса зубчатые цилиндрические | m | ГОСТ 1486-84 |
| · передачи Новикова модуль | ||
| · редукторы планетарные | ГОСТ 25022-81 | |
| · делительный диаметр центрального колеса | d | |
| · номинальное передаточное число | u | |
| · номинальное значение высоты оси | Rh | |
| Передачи зубчатые конические | ГОСТ 12289-76 | |
| · номинальный внешний делительный | de2 | |
| · диаметр колеса | ||
| · номинальное передаточное число | u | |
| · ширина зубчатого венца | b | |
| Передачи червячные цилиндрические | ГОСТ 19672-74 | |
| · модуль | m | |
| · коэффициент диаметра червяка | q | |
| · межосевое расстояние | aw | |
| · число зубьев | z1 и z2 |
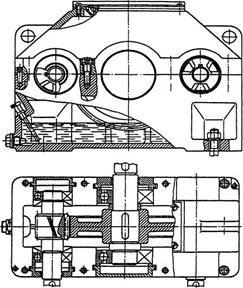 |
Одноступенчатые цилиндрические зубчатые редукторы (рис. 1.3) применяют при передаточных числах, не превышающих 6,3.
Рисунок 1.3 — Цилиндрический одноступенчатый зубчатый горизонтальный двухпоточный редуктор с двумя быстроходными валами
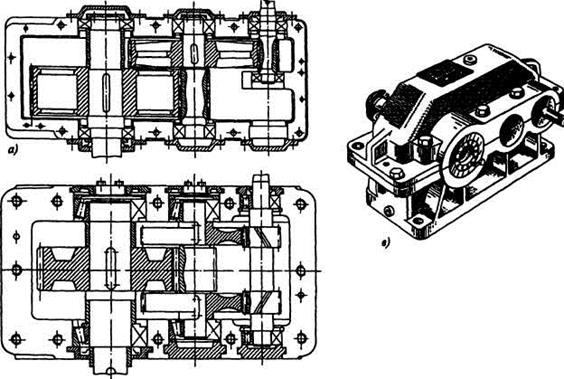 |
При больших значениях следует применять двухступенчатые редукторы. Наиболее распространённой схемой двухступенчатых редукторов является простая развернутая (рис. 1.4, а)с однопоточной передачей энергии. К ее преимуществам относятся малая ширина редуктора, высокая технологичность и унифицированность. Недостатком является несимметричное расположение опор относительно зубчатых колес, вызывающее неравномерное распределение нагрузки по ширине зубчатых венцов. В конструкции с раздвоенной быстроходной ступенью (рис. 1.4, б) опоры расположены симметрично относительно зубчатых колес тихоходной ступени.
Рисунок 1.4 — Двухступенчатый зубчатый редуктор:
а — с однопоточной передачей энергии; б — с двухпоточной передачей энергии (раздвоенной быстроходной ступенью); в — общий вид
Благодаря этому достигается равномерная нагруженность опор и улучшаются условия работы зубчатых колес. Если раздвоенную ступень выполнить из косозубых колес, то осевые нагрузки на подшипники уравновесятся. Для обеспечения равномерного распределения нагрузки между параллельно работающими передачами вал, несущий шестерни, надо устанавливать на подшипниках, допускающих осевое смещение и саморегулирование раздвоенной передачи.
 |
По условиям компоновки приводовоси быстроходного и тихоходного валов редуктора могут находиться на одной линии; такие редукторы называют соосными (рис. 1.5). Соосные редукторы компактней несоосных и во многих случаях позволяют получить удачную общую компоновкупривода, но из-за необходимости размещения подшипников быстроходного и тихоходного валов внутри корпуса имеют увеличенный размер в осевом направлении и усложненную конструкцию корпуса. Крометого, наблюдение за работой и контроль состояния внутренних подшипников при эксплуатации затруднены. На рис. 1.5, б показана кинематическая схема соосного редуктора с уменьшенными размерами в осевом направлении за счет отсутствия внутренней стенки. Оба подшипника быстроходного вала размещены в стакане, который одновременно предназначен и для установки одной из опор тихоходного вала. Для увеличения жесткости стакан выполнен с толстыми оребренными стенками; колесо тихоходной ступени, в отверстии которого размещен подшипник, изготовлено как одно целое с валом.
Рисунок 1.5 — Соосный редуктор:
а — конструкция; б — кинематическая схема
 |
Конические зубчатые редукторы применяются для передачи вращающего момента между валами, оси которых пересекаются под некоторым углом, как правило, равным 90° (рис. 1.6).
Рисунок 1.6 — Конструкции конических редукторов:
а— обыкновенная, б — кинематическая схема, в — специальная: 1 — стакан ведущего зубчатого колеса, 2 — шлицевой фланец, 3 — ведущее зубчатое колесо, 4 — картер,
5 — суфлер, 6 — стакан ведомого зубчатого колеса, 7 — шлицевой фланец, 8 — ведомое зубчатое колесо, 9 — смотровой люк, 10 — магнитная пробка, 11 — заглушка (место установки термодатчика температуры масла)
 |
Конические и цилиндрические зубчатые передачи могут быть выполнены в одном корпусе, т.е. в виде коническо-цилиндрического редуктора (рис. 1.7).
Рисунок 1.7 — Коническо-цилиндрический редуктор
 |
В конструктивно-технологическом исполнении планетарные редукторы (рис. 1.8) сложнее редукторов, описанных выше.
Рисунок 1.8 — Планетарный редуктор: а — конструкция; б — кинематическая схема.
Это обусловлено необходимостью компоновки в небольших габаритах сносно расположенных вращающихся колес и водила. Планетарные редукторы получили широкое распространение, особенно в тех машинах, для которых массовые и габаритные показатели являются главными (например, в летательных аппаратах, транспортных и сельскохозяйственных машинах и т.п.).
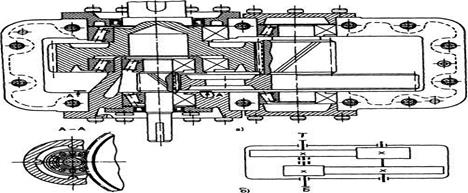
Редуктор (рис. 1.9) состоит из корпуса 1 с крышкой 2. Ведущая вал-шестерня 4 находится в зацеплении с колесами 3 и 5, имеющими разное число зубьев. Колесо 5 с удлиненной ступицей подвижно и соосно установлено на подшипниках качения на ведомом валу 10. Ступица колеса 3 относительно зубчатого конца выполнена эксцентрично. На подшипниках ступицы колеса 3 установлен сателлит 9, жестко соединенный с шатуном 7, который опирается через подшипники на вал 6, имеющий в месте сопряжения шатуна тот же эксцентриситет, что и ступица колеса 3. Таким образом, сателлит 9, шатун 7, эксцентричный вал 6 и эксцентричная ступица колеса 3 образуют параллелограммный механизм, кинематическая связь которого с ведомым валом 10 осуществляется с помощью шестерни 4, колес 3 и 5 через сателлит 9, находящийся в зацеплении с центральным колесом 8, с внутренними зубьями. Колесо 8 и сателлит 9 выполняют с малой разницей зубьев.
При вращении вал-шестерни 4 движение передается колесам 3 и 5, которые посредством эксцентричных шеек колеса 3 и вала 6 сообщают круговое поступательное движение сателлиту 9 планетарной передачи. Зацепляясь с колесом 8, сателлит 9 за один оборот колес 3 и 5 поворачивает колесо 8 на число его угловых шагов, равное разности зубьев сателлита 9 и колеса 8.
Рассматриваемый тип редукторов позволяет осуществлять вращение выходного вала в широком диапазоне частот вращения и = 35,5–1,4 об/мин, что особенно важно для малых значений частот вращения выходного вала, так как редукторы простых зубчатых передач для этого случая имеют большие размеры и сложную конструкцию. В отличие от простых многоступенчатых зубчатых и планетарных, редуктор на рис. 1.9 имеет простую конструкцию, малое число деталей. Компоновка сателлита планетарной передачи на ведомом колесе 3 быстроходной ступени позволяет уменьшить осевые габариты редуктора. Подвижная установка ведомого колеса на выходном валу в сочетании с изготовлением кривошипа на удлиненной ступице упрощает выходной вал и сателлит планетарной передачи, позволяет установить выходной вал с широко разнесенными подшипниками Редуктор имеет высокую нагрузочную способность из-за многопарности зацепления с малой разностью в числе зубьев колес тихоходной ступени, а быстроходная ступень не лимитирует нагрузочную способность редуктора, так как
 |
она мало нагружена.
а) в)
Рисунок 1.9 — Цилиндрический колесно-шатунный редуктор:
а — конструкция; б — кинематическая схема; в — общий вид
1 — корпус; 2 — крышка; 3 — ведомое колесо; 4 — вал шестерня; 5 — ведомое колесо;
6 — вал; 7 — шатун; 8 — колесо; 9 — сателлит; 10 — ведомый вал
 |
Волновые зубчатые редукторы.Как и планетарная, волновая передача состоит из трех основных звеньев (рис. 1.10): неподвижного жесткого колеса 2 с внутренними зубьями, гибкого колеса 3, представляющего собой упругую тонкостенную трубу, и генератора волн 1, деформирующего в радиальном направлении гибкое колесо.
Рисунок 1.10 — Волновый зубчатый редуктор: а — конструкция; б — кинематическая схема; 1 — генератор волн; 2 — жесткое колесо с внутренними зубьями; 3 — гибкое колесо
Разновидность волновых редукторов определяют главным образом конструкцией генератора и гибкого колеса. Так, на рис. 1.10 генератор волн выполнен в виде профилированного кулачка с напресованным на него гибким подшипником.
Большое передаточное отношение одноступенчатого волнового зубчатого редуктора (и = 60–315), а также высокая удельная материалоемкость выгодно отличают его от других зубчатых передач, в том числе и планетарных.
Червячные редукторы.Червячные редукторы применяют при передаче момента между перекрещивающимися валами. Благодаря высоким виброакустическим свойствам и возможности получить в одной ступени большие передаточные отношения (u = 10–80), их широко используют в ручных и лифтовых лебедках, в приводах от электродвигателя на ведущие оси троллейбусов и др.
В зависимости от расположения червяка относительно колеса червячные редукторы могут иметь исполнения (рис. 1.11): червяк под колесом (1) — наиболее распространенная схема; червяк над колесом (2);червяк с вертикальным расположением вала (3, 4);червяк сбоку от колеса, ось которого вертикальна (5, 6) Соответственно указанным схемам выполняют конструкции редукторов.
 |
Рисунок 1.11 — Варианты расположения червячной пары в редукторах типа Ч:
1 — червяк под колесом; 2 — червяк над коленом; 3, 4 — тихоходный вал вертикальный; 5 — быстроходный вал вертикальный выходным концом вверх; 6 — быстроходный вал вертикальный выходным концом вниз
В настоящее время серийно выпускают одноступенчатые червячные редукторы типа Ч с универсальным корпусом (рис. 1.12), позволяющим выполнять различные варианты расположения и сборки червячной пары. Такая конструкция (см. рис. 1.12, В–В) позволяет монтировать редуктор непосредственно на вал машины, что снижает массу, уменьшает габаритные размеры и стоимость привода. При исполнении редуктора на лапах (см. рис. 1.12, А–А) в ступицу колеса монтируется тихоходный вал.
 |
Рисунок 1.12 — Одноступенчатый червячный редуктор с универсальным корпусом
В зависимости от варианта сборки редуктора (см. табл. 1.12) тихоходный вал может быть одноконцевым или двухконцевым. Параллельно оси вала колеса в корпусе имеется четыре прилива со сквозными отверстиями для крепления лап шпильками. Одинаковые расстояния между осями отверстий в приливах корпуса позволяют с помощью одних и тех же лап менять пространственное положение редуктора в соответствии с вариантами расположения червячной пары.
Мотор-редукторы.В последнее время все более широкое распространение получают мотор-редукторы. Применение их в кинематической схеме привода обеспечивает ряд преимуществ: уменьшает размеры и массу на единицу передаваемого момента, сокращает число деталей, удобно при монтаже привода и др.
Вариаторы.Большинство современных технологических машин требуют регулирования скорости рабочих органов в зависимости от условий осуществления технологического процесса.
Применение в машинах вариаторов значительно упрощает ее конструкцию, позволяет установить оптимальный скоростной режим и регулировать угловые скорости на ходу. Все это существенно повышает производительность машины, расширяет ее функциональные возможности, кроме того, вызывает уменьшение шума и вибрации. Эти достоинства вариаторов обусловили их широкое распространение в различных областях машиностроения в машинах пищевой и легкой промышленности, в станках, сельскохозяйственном и дорожном машиностроении и т.д.
Главными характеристиками вариаторов являются: диапазон регулирования Д, наименьшая скорость тихоходного вала п2тin и мощность Р на нем. Кроме того, важно знать значения КПД, удельной массы, габаритов, стоимости. В клиноременных вариаторах угловая скорость ведомого вала зависит от диаметров одновременно обоих шкивов или одного из них (рис. 1.13, а). Предельные передаточные отношения вариатора:
u1= ω1 /ω2min= D2 /d1(1–  ) и u2 = ω1 / ω2max= d2 /D1(1– ),(1.20)
) и u2 = ω1 / ω2max= d2 /D1(1– ),(1.20)
где D1, d1 и D2, d2 — наибольший и наименьший диаметры ведущего и ведомого колеса;
 — коэффициент скольжения, который зависит от типа ремня и конструкции передачи.
— коэффициент скольжения, который зависит от типа ремня и конструкции передачи.
Основной кинематической характеристикой вариаторов является диапазон регулирования Д, равный отношению этих передаточных величин.
Скольжение снижает угловую скорость ведомого вала, но на диапазон регулирования не влияет.
Главные достоинства клиноременных вариаторов (рис. 1.13) — простота конструкции, надежность и простота эксплуатации.
В качестве тягового органа в ременных вариаторах применяют как стандартные клиновые ремни по ГОСТ 1284.2–89, так и специальные широкие зубчатые вариаторные ремни (рис. 1.14, в). Передаточное отношение регулируют изменением диаметра одного или одновременно обоих шкивов посредством осевого перемещения конических дисков, образующих шкив.
Для сплошных шкивов и стандартных ремней Д =1,3–1,7. Различают вариаторы со стандартными и широкими ремнями, с одним, двумя или четырьмя регулируемыми шкивами. На рис. 1.13, б показан вариатор с автоматически регулируемым шкивом 2 и ведущим прижимным 1. Регулирование передаточного числа может производиться вручную или с помощью дистанционного управления. Диапазон регулирования Д<3;  = 0,8–0,9, мощность 5–10 кВт, при нескольких ремнях — до 55 кВт. Однако применение нескольких ремней усложняет конструкцию и повышает требования к точности изготовления.
= 0,8–0,9, мощность 5–10 кВт, при нескольких ремнях — до 55 кВт. Однако применение нескольких ремней усложняет конструкцию и повышает требования к точности изготовления.
Расчет ременных вариаторов производят по аналогии с расчетом клиноременной передачи, с учетом числа регулируемых шкивов.
Цепные вариаторы по сравнению с клиноременными сложнее в производстве и дороже, но компактнее, долговечнее и более надежны в эксплуатации. Наиболее распространенная конструкция вариатора с зубчатыми конусами и специальными цепями показана на рис. 1.14.
 |  |
Раздвижные диски 3, выполненные с рифленой рабочей поверхностью, устанавливают на валу так, чтобы выступы одного диска находились против впадин другого. Звенья цепи снабжены пакетом тонких пластин, которые легко перемещаются в обойме поперек цепи. Пластины, попадающие на выступы, при набегании цепи 2 на диски 3 отжимаются во впадины противоположного диска; так происходит зацепление.
Рисунок 1.13 — Клиноременный вариатор: а — принципиальная схема; б — конструкция ремня вариатора; в — конструкция вариатора с одним широким ремнем; 1 — ведущий прижимной шкив; 2 — автоматически регулируемый шкив
 |
Рисунок 1.14 —Цепной вариатор: 1 — винт; 2 — цепь; 3 — диски; 4 — рычаги
Передвижение дисков, а следовательно, регулирование скорости, производится рычагами 4, поворот которых осуществляется винтом 1. При этом одна пара дисков сдвигается, а другая раздвигается, и цепь меняет свое положение.
Диапазон регулирования Д такого вариатора равен до 6, передаваемая мощность — до 18,5 кВт. Срок службы цепей — до 5000 ч.
Конструктивные особенности. Основные особенности проектирования вариатора заключаются в конструировании ведущих, ведомых и промежуточных звеньев, а также механизмов управления.
Каждая новая конструкция вариатора после расчета и изготовления тщательно испытывается и доводится, прежде чем будет передана в серийное производство, так как многие особенности конструированных решений, работы и нагруженности деталей расчетом предусмотреть невозможно и приходится отыскивать их опытным путем.
Для существенного снижения частоты вращения ведомого вала применяют комбинированные приводы. Такой привод состоит из зубчатой передачи и вариатора, смонтированных в одном корпусе. На рис. 1.15 показан мотор-вариатор, состоящий из цепного вариатора и планетарного редуктора, мощностью 6,0 кВт, при частоте вращения ведомого вала от нескольких до 250 мин--1.
 |
Рисунок 1.15 — Мотор-вариатор
Вопросы для самоконтроля
1 Дайте определение функционального назначения редуктора. По каким признакам они классифицируются?
2 Поясните разницу между редукторами, выполненными по схеме на
рис. 1 .4, а ирис. 1.4, б, а также с редуктором на рис. 1.3.
3 Чем отличается быстроходная ступень редуктора на рис. 1.7 от редуктора
на рис. 1.6?
4 Благодаря чему обеспечивается самоцентрирование солнечного колеса
между сателлитами в конструкции на рис. 1.8?
5 Какими достоинствами и недостатками обладает конструкция редуктора
на рис. 1.9?
6 Чем характерна конструкция редуктора на рис. 1. 9?
7 Поясните принцип работы редуктора на рис. 1.10?
8 Поясните преимущества мотор-редукторов, в каких случаях они
применяются?
9 Дайте определение вариаторам, в каких случаях они применяются и их
главная техническая характеристика.
10 Дайте определение основного параметра редуктора.
Глава 2 технологические машины аграрного производства как объект проектирования электромеханических приводов
Дата добавления: 2020-02-05; просмотров: 1351;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
