Изменением сопротивления в цепи якоря
Этот способ регулирования отличается универсальностью и простотой реализации. Применяется, когда не требуется высокого качества регулирования [9; 14]. Диапазон регулирования небольшой:  . В зависимости от характера изменения добавочного сопротивления, включенного в цепь якоря (рис. 4.1), регулирование может быть плавное, может быть ступенчатое (ступенчатое чаще). Регулирование осуществляется вниз от номинальной скорости. С увеличением добавочного резистора жесткость характеристик снижается (рис. 4.4). При этом все характеристики выходят из одной точки
. В зависимости от характера изменения добавочного сопротивления, включенного в цепь якоря (рис. 4.1), регулирование может быть плавное, может быть ступенчатое (ступенчатое чаще). Регулирование осуществляется вниз от номинальной скорости. С увеличением добавочного резистора жесткость характеристик снижается (рис. 4.4). При этом все характеристики выходят из одной точки  .
.
Оценим допустимую нагрузку
 (4.6)
(4.6)
 - относительный перепад скорости (статизм).
- относительный перепад скорости (статизм).
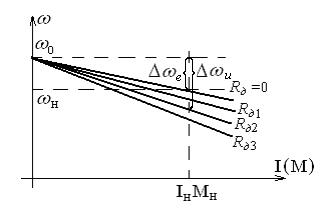
Рис. 4.4. Семейство механических характеристик ДПТ НВ:
Rд =0 – естественная и Rдn – искусственные характеристики
Значение  , приблизительно соответствует D=2, в этом случае потери двигателя:
, приблизительно соответствует D=2, в этом случае потери двигателя:  - следовательно, КПД приблизительно равен 50%, то есть регулирование не экономичное, большие потери в якорной цепи. Этот способ используется в приводах небольшой мощности. Учитывая, что магнитный поток двигателя постоянный, момент, развиваемый двигателем на регулировочных характеристиках, равен номинальному. Следовательно, допустимая нагрузка на двигателе при работе на искусственных характеристиках равна номинальной
- следовательно, КПД приблизительно равен 50%, то есть регулирование не экономичное, большие потери в якорной цепи. Этот способ используется в приводах небольшой мощности. Учитывая, что магнитный поток двигателя постоянный, момент, развиваемый двигателем на регулировочных характеристиках, равен номинальному. Следовательно, допустимая нагрузка на двигателе при работе на искусственных характеристиках равна номинальной  .
.
Способ регулирования частоты вращения ЭП, который характеризуется равенством,  получил название регулирование при «постоянном моменте».
получил название регулирование при «постоянном моменте».
На практике чаще всего резистор Rд секционирован, и при помощи контактора в процессе изменения скорости шунтируются ступени этого добавочного резистора в цепи якоря.
В приводах небольшой мощности используется импульсное регулирование скорости. Суть этого способа (рис. 4.5): шунтирование Rд ключом К, замыкаемого с определенной частотой.
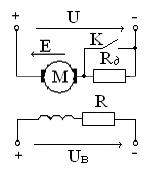
Рис. 4.5. Схема включения ДПТ НВ.
Соотношение длительностей замкнутого t1 и разомкнутого t2 состояния ключа (рис. 4.6) характеризуют относительной величиной ε – называемой скважностью управляющих импульсов.
 ,
,
где  - время замкнутого состояния ключа,
- время замкнутого состояния ключа,
 - время разомкнутого состояния ключа
- время разомкнутого состояния ключа
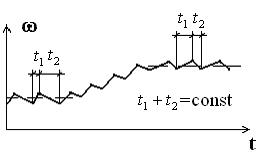
Рис. 4.6. Изменение скорости привода при изменении 
Очевидно, что с увеличением при неизменной нагрузке на валу угловая скорость двигателя будет расти.
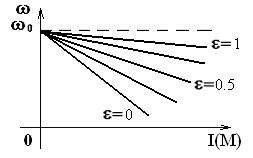
Рис. 4.7. Механические характеристики привода при
импульсном регулировании скорости
При =1 двигатель работает на естественной характеристике (рис. 4.7) (ключ К - замкнут). При =0 двигатель работает на реостатной характеристике соответствующей Rд (ключ К - разомкнут).
 , (4.7)
, (4.7)
 . (4.8)
. (4.8)
Учитывая, что скорость двигателя зависит от нагрузки и величины  в цепи якоря, мы можем изменять среднюю скорость двигателя, поддерживая её постоянной при колебаниях нагрузки или изменяя по определенному закону. В результате мы получаем возможность управления приводом, аналогичную рассмотренной ранее при тех же механических характеристиках. Только на искусственных характеристиках указывают скважность, которая соответствует Rдэ (рис. 4.7). Как видим из выражения (4.8), характеристики линейны. Такой способ применяется в приводах небольшой мощности.
в цепи якоря, мы можем изменять среднюю скорость двигателя, поддерживая её постоянной при колебаниях нагрузки или изменяя по определенному закону. В результате мы получаем возможность управления приводом, аналогичную рассмотренной ранее при тех же механических характеристиках. Только на искусственных характеристиках указывают скважность, которая соответствует Rдэ (рис. 4.7). Как видим из выражения (4.8), характеристики линейны. Такой способ применяется в приводах небольшой мощности.
Дата добавления: 2016-06-15; просмотров: 2385;
Поиск по сайту
Узнать еще
- III. Расчёт электрического состояния цепи с последовательным соединением элементов L, R, C.
- III. Эквивалентное преобразование сопротивления.
- IV. Расчёт цепи с параллельным соединением R, L, C элементов
- Q – сила полезного сопротивления.
- R - полная аэродинамическая сила; Y - подъемная сила; X- сила лобового сопротивления; a- угол атаки;q- угол качества
- RLC-контур с параллельным соединением элементов в цепи переменного тока.
- А – изменением подводимого напряжения; б – шунтированием обмотки возбуждения.
- АКТИВНОЕ И РЕАКТИВНОЕ СОПРОТИВЛЕНИЯ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
