Регулирование скорости двигателя изменением
Магнитного потока
Скорость двигателя зависит от магнитного потока, причем с увеличением магнитного потока она уменьшается (см. уравнение (4.4)). Следовательно, изменяя ток в цепи возбуждения, изменяем магнитный поток и скорость двигателя [1; 9].
Поскольку электрическая машина рассчитывается на продолжительную работу с номинальной нагрузкой, стремятся оптимально использовать железо машины. Для этой цели рабочая точка обычно выбирается на колене кривой намагничивания (рис. 4.10). Такой выбор рабочей точки ограничивает возможности регулирования скорости двигателя за счет увеличения тока возбуждения. На практике используют только регулирование за счет уменьшения магнитного потока вниз от номинального. В результате скорость регулируется вверх от номинальной. Диапазон регулирования равен 2 (редко 3). Регулирование плавное, с увеличением скорости жесткость характеристик снижается.
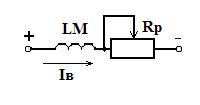
Рис. 4.9. Схема управления током возбуждения ДПТ НВ
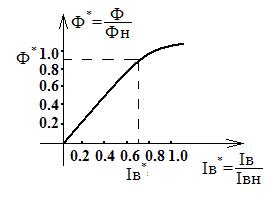
Рис. 4.10. Кривая намагничивания
Достоинством этого способа является то, что управление двигателем осуществляется за счет изменения сопротивления в слаботочной цепи (рис. 4.9) и, следовательно, потери при регулировании в этом случае минимальны.
Электромеханические характеристики (рис. 4.11) двигателя имеют общую точку, соответствующую Iкз  , так как Iкз от магнитного потока Ф не зависит.
, так как Iкз от магнитного потока Ф не зависит.
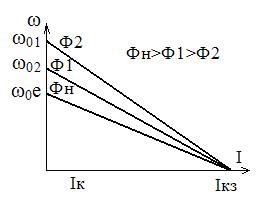
Рис. 4.11. Электромеханическая характеристика ДПТ НВ
Механические характеристики показаны на рис. 4.12. Очевидно, что Мкз=kФIкз – зависит от Ф и снижается с его уменьшением.
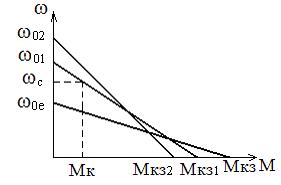
Рис. 4.12. Механическая характеристика ДПТ НВ
Определяем допустимую нагрузку на искусственных характеристиках. Полагая в уравнении 4.3 I=Iн, получим
 ,
,
где  - поток на искусственной характеристике.
- поток на искусственной характеристике.
В нашем случае Фи<Фн  Мдоп<Мн, то есть ДПТ по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом. Определим, при каких условиях машина используется наиболее эффективно на регулировочных характеристиках. Для этого запишем ЭДС якоря на естественной и искусственной характеристиках:
Мдоп<Мн, то есть ДПТ по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом. Определим, при каких условиях машина используется наиболее эффективно на регулировочных характеристиках. Для этого запишем ЭДС якоря на естественной и искусственной характеристиках:
 ,
,
 .
.
Учитывая, что напряжение, ток и сопротивление якоря постоянны Ее=Еи, следовательно:
 ,
,
где  - скорость на искусственной характеристике при номинальном токе.
- скорость на искусственной характеристике при номинальном токе.
В результате:
 .
.
При этом способе регулирования мы максимально используем двигатель (не перегружая его) при постоянной мощности нагрузки.
Такой способ регулирования в практике ЭП получил название «регулирование с постоянной мощностью». Этот способ регулирования используется в замкнутых системах привода для расширения диапазона регулирования за счет второй зоны. В первой зоне регулирование обычно осуществляется за счет изменения напряжения на якоре (основная зона), а во второй за счет изменения магнитного потока. Использование двухзонного регулирования позволяет в два-три раза увеличить диапазон регулирования.
В простейшем случае регулирование осуществляется за счет изменения регулировочного сопротивления в цепи обмотки возбуждения (рис. 4.9). Величину этого регулировочного сопротивления Rp1 можно найти определив магнитный поток Ф1.
Магнитный поток  , при котором механическая характеристика проходит через точку с координатой (
, при котором механическая характеристика проходит через точку с координатой (  ) (рис. 4.12) при U=Uн; Rд=0, определяется при решении уравнения механической характеристики относительно Ф1*.
) (рис. 4.12) при U=Uн; Rд=0, определяется при решении уравнения механической характеристики относительно Ф1*.
 , (4.11)
, (4.11)
где  ;
;  ;
;  .
.
Величину Iв1* находят по кривой намагничивания (рис. 4.10), предварительно определив соответствующее значение Ф1*.
После этого находят ток возбуждения  и определяют
и определяют  (рис. 4.9).
(рис. 4.9).
 . (4.12)
. (4.12)
Дата добавления: 2016-06-15; просмотров: 2365;
Поиск по сайту
Узнать еще
- I.5.3 КОСМИЧЕСКИЕ СКОРОСТИ
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- Pиc. 67. Зависимость скорости осаждения от величины катодно-анодного отношения
- U – образные и рабочие характеристики синхронного двигателя
- VII. Регулирование частоты вращения двигателя
- А – изменением подводимого напряжения; б – шунтированием обмотки возбуждения.
- Абсолютные скорости изменения критериев оценки УБП
- Автоматическое регулирование (РОУ) редукционно-охладительных установок.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
