Схемы включения и статические характеристики двигателя
Основная схема включения ДПТ НВ приведена на рис. 4.1 [1; 9; 10; 14].
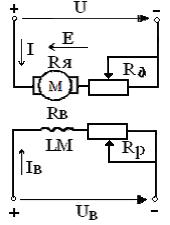
Рис. 4.1. Схема включения ДПТ НВ
В этой схеме: U – напряжение питания якоря;
Uв – напряжение питания обмотки возбуждения;
I – ток якоря;
Iв – ток возбуждения;
Rя= Rобмя + Rдп+ Rко + Rщк, сопротивление якорной цепи двигателя;
Rобмя – сопротивление обмотки якоря;
Rдп– сопротивление добавочных полюсов;
Rко– сопротивление компенсационной обмотки;
Rщк– сопротивление щеточного контакта;
Rд – добавочное сопротивление;
Rв – сопротивление обмотки возбуждения;
Rр – регулировочный резистор в цепи возбуждения;
E – ЭДС якоря.
Для упрощения будем считать, что момент на валу двигателя равен электромагнитному моменту (пренебрегаем механическими потерями) и пренебрегаем реакцией якоря.
ЭД описываются тремя основными уравнениями, определяющими работу двигателя:
 , (4.1)
, (4.1)
 , (4.2)
, (4.2)
 , (4.3)
, (4.3)
где  ,
,
 - магнитный поток в Веберах;
- магнитный поток в Веберах;
 - подводимое напряжение к якорю, В;
- подводимое напряжение к якорю, В;
 - конструктивный коэффициент двигателя,
- конструктивный коэффициент двигателя,
где p – число пар полюсов;
N – число активных проводников обмотки якоря;
a – число параллельных ветвей обмотки якоря.

На практике используется электромеханическая характеристика двигателя, показывающая зависимость частоты вращения от тока якоря. Из уравнений (4.1) и (4.2) получим
 . (4.4)
. (4.4)
Используя уравнение (4.3), получим механическую характеристику двигателя:
 . (4.5)
. (4.5)
При постоянном магнитном потоке Ф =const механические и электромеханические характеристики отличаются лишь масштабом по оси абсцисс (рис. 4.2) и представляют собой семейство параллельных прямых.
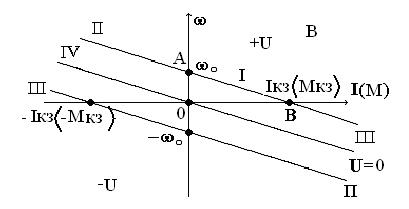
Рис. 4.2. Механические характеристики ДПТ НВ:
А – точка холостого хода  , I=0, M=0;
, I=0, M=0;
B – точка короткого замыкания  , I=Iкз, M=Мкз
, I=Iкз, M=Мкз
Дата добавления: 2016-06-15; просмотров: 2180;
Поиск по сайту
Узнать еще
- II. Физические характеристики участников коммуникации
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- IV. Экспериментальное определение параметров схемы замещения трансформаторов.
- U – образные и рабочие характеристики синхронного двигателя
- U – образные характеристики синхронного генератора
- U-образные характеристики
- VII. Регулирование частоты вращения двигателя
- XIII. ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ОБОРУДОВАНИЯ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
