Замкнутые системы управления электроприводом переменного тока
Решить проблему регулирования частоты вращения АД в широком диапазоне при жестких характеристиках удается лишь в замкнутых системах управления. В качестве примера рассмотрим наиболее распространенные приводы переменного тока [4, 9, 11, 13].
3.1. Приводы с тиристорным регулятором напряжения[4]
Способ регулирования скорости вращения АД изменением напряжения в разомкнутых системах не нашел применения из-за ограниченного диапазона регулирования и резкого снижения перегрузочной способности (характеристики показаны пунктиром 1,2,3,4 на рис. 3.1,б).
Функциональная схема замкнутой системы управления представлена на рис. 3.1,а:
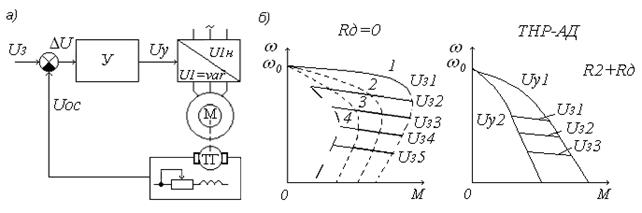
Рис.3.1. Структурная схема привода с тиристорным регулятором напряжения (а) и характеристики привода (б и в)
В замкнутых системах управления обратная связь по скорости вращения дает возможность получить достаточно жесткие характеристики  (рис. 3.1,б) и обеспечить регулирование скорости вращения в широком диапазоне – в некоторых случаях до
(рис. 3.1,б) и обеспечить регулирование скорости вращения в широком диапазоне – в некоторых случаях до  .
.
Зависимость момента и скорости двигателя от напряжения на обмотке статора [4] может быть представлена уравнением (3.1).
 , (3.1)
, (3.1)
где  – напряжение на обмотке статора.
– напряжение на обмотке статора.
Анализ работы ЭП может быть проведен по структурной схеме (рис. 3.2).
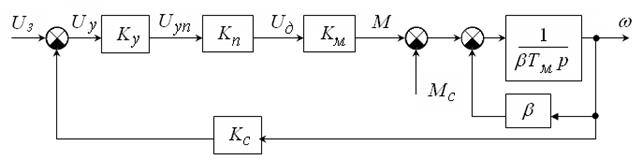
Рис. 3.2. Структурная схема ЭП с ТРН
Структурная схема составлена при линеаризации уравнения  (3.1), без учета электромагнитных процессов в двигателе.
(3.1), без учета электромагнитных процессов в двигателе.
Передаточная функция ЭП:
 . (3.2)
. (3.2)
Соответствующее дифференциальное уравнение:
 , (3.3)
, (3.3)
где  – модуль жесткости механической характеристики в разомкнутой системе ЭП;
– модуль жесткости механической характеристики в разомкнутой системе ЭП;
 – электромеханическая постоянная времени ЭП;
– электромеханическая постоянная времени ЭП;
 – суммарный момент инерции ЭП, приведенный к валу двигателя;
– суммарный момент инерции ЭП, приведенный к валу двигателя;
 – коэффициент двигателя;
– коэффициент двигателя;
 – напряжение двигателя (по первой гармонике).
– напряжение двигателя (по первой гармонике).
В установившемся режиме при  из дифференциального уравнения получаем уравнение механической характеристики ЭП при
из дифференциального уравнения получаем уравнение механической характеристики ЭП при  :
:
 . (3.4)
. (3.4)
При расчете механических характеристик следует иметь в виду, что коэффициенты  и
и  определяются в зависимости от значений скорости.
определяются в зависимости от значений скорости.
Недостатком этого метода является то, что двигатель в каждый момент времени работает на искусственной характеристике, полученной за счет изменения напряжения. В результате с увеличением диапазона регулирования резко возрастает скольжение двигателя (учитывая, что точка  общая для всех характеристик). В итоге резко возрастают потери двигателя. В частности, при диапазоне регулирования
общая для всех характеристик). В итоге резко возрастают потери двигателя. В частности, при диапазоне регулирования  потери составляют 50%, а при увеличении диапазона регулирования до 5 потери увеличиваются до 80%. Кроме того, с переходом на нижние регулировочные характеристики уменьшается максимальный развиваемый момент. Правда, с последним недостатком можно бороться, если использовать АД с фазным ротором (рис 3.1,в).
потери составляют 50%, а при увеличении диапазона регулирования до 5 потери увеличиваются до 80%. Кроме того, с переходом на нижние регулировочные характеристики уменьшается максимальный развиваемый момент. Правда, с последним недостатком можно бороться, если использовать АД с фазным ротором (рис 3.1,в).
Эти приводы широко используются в кратковременных и повторно-кратковременных режимах. Мощность таких приводов обычно ограничивается  кВт. К их достоинствам можно отнести получение хороших динамических характеристик и различных режимов работы за счет использования тиристорных регуляторов напряжения.
кВт. К их достоинствам можно отнести получение хороших динамических характеристик и различных режимов работы за счет использования тиристорных регуляторов напряжения.
Дата добавления: 2016-06-15; просмотров: 3521;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I. Способы представления переменного синусоидального тока и напряжения.
- I. Установка для исследования сдвига фаз колебаний силы тока и напряжения с помощью компьютера и осциллографа-приставки
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
