Приводы с частотным управлением
Когда необходимо получить широкий диапазон регулирования частоты вращения при продолжительном режиме работы и значительной мощности двигателя, используется частотное управление. Такие приводы обеспечивают регулирование скорости вращения АД за счет одновременного изменения частоты питающей сети  и приложенного к Д напряжения
и приложенного к Д напряжения  . Возможность регулирования скорости очевидна из выражения
. Возможность регулирования скорости очевидна из выражения
 . (3.5)
. (3.5)
Необходимость регулирования приложенного к двигателю напряжения одновременно с изменением частоты обусловлена необходимостью поддержания постоянного магнитного потока двигателя. При этом академиком Костенко, исходя из условия сохранения постоянной перегрузочной способности двигателя, выведены законы изменения напряжения на двигателе в зависимости от частоты питающей сети при различных видах нагрузки. Наиболее часто встречается случай, когда  (он соответствует нагрузке с постоянным моментом).
(он соответствует нагрузке с постоянным моментом).
Приводы с частотным управлением весьма сложны и представляют собой нелинейную систему с перекрестными связями и используются, как правило, в замкнутых системах управления. Главным элементам такого привода (помимо двигателя) является частотный преобразователь. На практике встречаются преобразователи частоты двух типов: с непосредственной связью и со звеном постоянного тока.
В преобразователях частоты с непосредственной связью приложенное напряжение через тиристоры подается прямо на обмотки двигателя и обеспечивается непосредственное преобразование энергии, что обусловливает их высокий КПД (  ). При этом напряжение
). При этом напряжение  формируется из кусочков синусоид приложенного напряжения.
формируется из кусочков синусоид приложенного напряжения.
Для получения простейшего преобразования постоянной частоты трехфазного тока в переменную необходим преобразователь, содержащий как минимум 18 тиристоров – и отсюда сложность управления. Кроме того, эти преобразователи не позволяют получить частоту выходного напряжения более 50% от входной (  ).
).
Для расширения диапазона регулирования используют источники энергии с частотой  Гц.
Гц.
Преобразователи со звеном постоянного тока значительно проще, но имеют двукратное преобразование энергии (переменный сигнал в постоянный, а потом постоянный в переменный). Отсюда более низкий КПД.
Преобразователи со звеном постоянного тока бывают двух типов: с управляемым выпрямителем и с неуправляемым выпрямителем. Чаще всего в них используются автономные инверторы напряжения. Применение автономных инверторов тока позволяет несколько расширить диапазон регулирования частоты.
В случае преобразователя с неуправляемым выпрямителем выпрямленное постоянное напряжение не регулируется, поэтому изменение и амплитуды и частоты осуществляется в автономном инверторе. Такие преобразователи позволяют получить больший диапазон регулирования, но они относительно сложны.
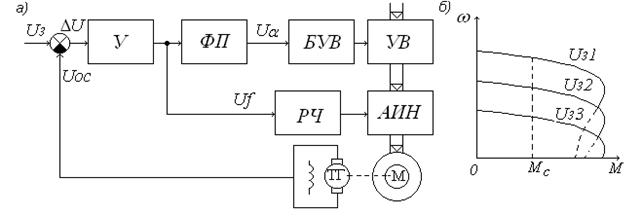
Рис.3.3. Структурная схема привода с частотным управлением и звеном постоянного тока (а) и его механические характеристики (б)
На рис. 3.3 изображены:
У - усилитель;
ФП - функциональный преобразователь (учитывает характер нагрузки,
поддерживая определенное соотношение  );
);
БУВ - блок управления выпрямителем;
УВ - управляемый выпрямитель;
РЧ - регулятор частоты;
АИН - автономный инвертор напряжения.
В таком преобразователе существует два канала управления:
- амплитудой (за счет управляемого выпрямителя);
- частотой питающей сети (за счет регулятора частоты).
Системы частотного управления обычно замкнутые (см. рис 3.3). Частотно–токовые системы принципиально могут работать только в замкнутом цикле.
Тиристорные приводы переменного тока с частотным управлением представляют собой многомерные системы с нелинейными характеристиками. При расчете таких систем осуществляют развязку каналов управления, компенсируя имеющие место перекрестные обратные связи. В результате оказывается возможным применение системы подчиненного регулирования координат. Система с развязанными каналами управления называется системой векторного управления. Расчет замкнутых систем переменного тока значительно сложнее расчета замкнутых систем постоянного тока.
Дата добавления: 2016-06-15; просмотров: 2399;
Поиск по сайту
Узнать еще
- Автоматизированный электропривод с частотным преобразователем с ШИМ.
- Вентили с полным управлением
- Вентиляторы охлаждения дизеля и их приводы
- ВЗАИМООТНОШЕНИЯ МЕЖДУ УПРАВЛЕНИЕМ «СУРГУТНЕФТЕПРОМХИМ» И СТРУКТУРНЫМИ ПОДРАЗДЕЛЕНИЯМИ ОАО «СУРГУТНЕФТЕГАЗ» ПРИ ПРОВЕДЕНИИ РАБОТ ПО ПОВЫШЕНИЮ НЕФТЕОТДАЧИ ПЛАСТОВ
- Гидравлические приводы
- Гидравлические силовые приводы.
- Гидроприводы с дроссельным регулированием
- ГИДРОПРИВОДЫ. ПНЕВМОПРИВОДЫ.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
