Манипуляционные системы
Сегодня основным типом манипуляционных систем роботов являются механические манипуляторы. Они представляют собой пространственные механизмы в виде кинематических цепей из звеньев, образующих кинематические пары с угловым или поступательным относительным движением и системой приводов обычно раздельных для каждой степени подвижности. Манипуляторы заканчиваются рабочим органом.
Степени подвижности манипулятора делятся на переносные и ориентирующие. Переносные степени подвижности служат для перемещения рабочего органа в рабочей зоне манипулятора, а ориентирующие— для его угловой ориентации. Минимально необходимое число переносных степеней подвижности для перемещения рабочего органа в пространстве рабочей зоны равно 3. Однако для расширения манипуляционных возможностей и реализации более сложных траекторий движения, например, с обходом препятствий, а также для повышения быстродействия манипуляторы обычно снабжают несколькими избыточными переносными степенями подвижности, хотя это, усложняет и удорожает робота. Современные манипуляторы в среднем имеют 4—6 степеней подвижности, но существуют манипуляторы и с 8—9 такими степенями.
Максимально необходимое число ориентирующих степеней подвижности равно 3. Они реализуются кинематическими парами с угловым перемещением, обеспечивающими поворот рабочего органа манипулятора относительно его продольной и 2 других взаимно перпендикулярных осей.
На рис. 3.1—3.4 показаны конструкции манипуляторов с 3 переносными степенями подвижности в различных системах координат и их рабочие зоны.
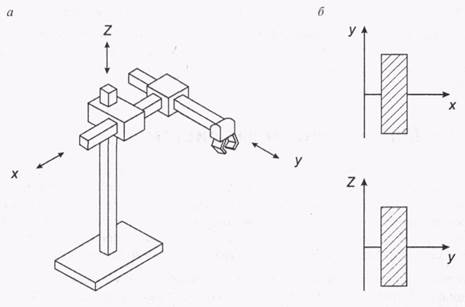
Рис.3.1. Манипулятор с прямоугольной системой координат (а) и его рабочая зона (б)
Манипуляторы, работающие в прямоугольной системе координат (рис. 3.1), имеют рабочую зону в форме параллелепипеда. Здесь все перемещения только поступательные. Поэтому такая система координат наиболее удобна для выполнения прямолинейных движений. Кроме того, она максимально упрощает программирование робота, так как оно обычно выполняется именно в прямоугольной системе координат, и, следовательно, в этом случае не требуется пересчета программ из одной системы координат в другую. На рис. 3.5 показан пример промышленного робота, манипуляторы которого работают в прямоугольной системе координат.

Рис. 3.2. а — манипулятор с цилиндрической системой координат; 6 — его рабочая зона
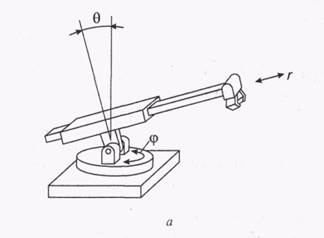
Рис. 3.3. а — манипулятор со сферической системой координат
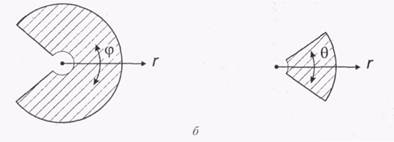
Рис. 3.3. б — его рабочая зона
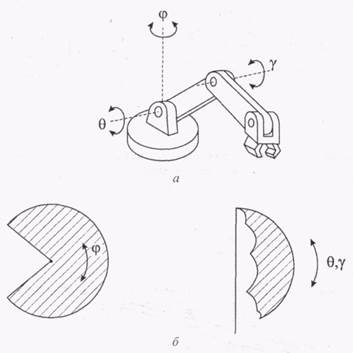
Рис. 3.4. а— манипулятор с угловой системой координат; б — его рабочая зона
В манипуляторах, работающих в цилиндрической системе координат (см. рис. 3.2), наряду с поступательными перемещениями осуществляется одно угловое перемещение (по окружности). Соответственно, рабочая зона ограничена цилиндрическими поверхностями. В цилиндрической системе координат работает робот, показанный на рис. 1.5.
В сферической системе координат (рис. 3.3) осуществляются уже 2 угловых перемещения и рабочая зона ограничена сферическими поверхностями. Такую систему координат имеет, например, манипулятор промышленного робота, показанного на рис. 1.6. Манипуляторы с такой системой координат, как правило, сложнее, чем с цилиндрической системой, однако компактнее.
Показанный на рис. 3.4 манипулятор с угловой системой координат производит только угловые перемещения, т. е. все его звенья представляют собой шарниры. Поэтому часто такие манипуляторы называют шарнирными и антропоморфными. Роботы с такого типа манипуляторами благодаря возможности последних складываться, не выступая практически за габариты основания робота, обладают наибольшей компактностью, хотя и наиболее сложны в управлении.
В манипуляторе робота "Пума", показанном на рис. 3.8, двигатель привода 1-й степени подвижности вокруг вертикальной оси размещен на основании манипулятора.
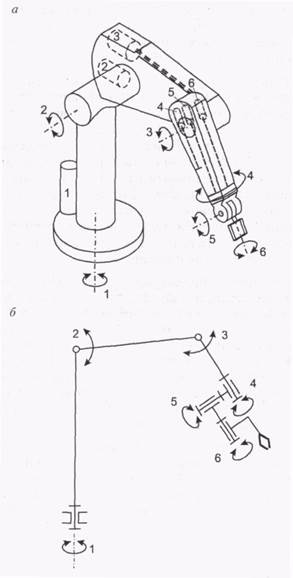
Рис. 3.8. Общий вид манипулятора робота "Пума" фирмы "Юнимейшен" (а) и его кинематическая схема (б)
Двигатели степеней подвижности 2 и 3 размещены рядом на 2-м звене. С приводимыми ими осями они связаны через редукторы, а двигатель 3 еще и валом с 2 механизмами Гука. Двигатели степеней подвижности 4, 5 и 6 размещены на 3-м звене манипулятора. Передача движения от них осуществляется через валы с шарнирами Гука и зубчатые передачи. Размещение этих двигателей с другой стороны оси вращения звена относительно основной его части обеспечивает статическое уравновешивание веса этих звеньев манипулятора относительно осей их вращения и соответственно разгрузку двигателей 2 и 3.
Специфическую группу манипуляционных систем составляют манипуляторы, которые предназначены для выполнения манипуляционных операций на значительном расстоянии от своего основания, так что основная длина манипулятора служит только для переноса его рабочего органа в зону выполнения этих операций, т. е. выполняет чисто транспортную задачу. На рис. 3.11 показан пример такого манипулятора длиной до 25 м, предназначенного для строительно-монтажных и т. п. работ. На рис. 3.12 приведен другой вариант решения той же задачи.
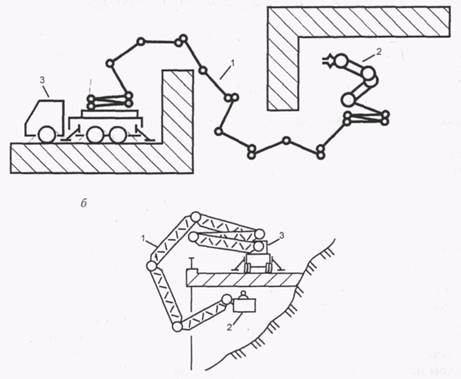
Рис. 3.11. Складной манипулятор:
1 — шарнирный транспортный манипулятор;
2 — рабочий манипулятор (а) или платформа с рабочим (б); 3 — носитель
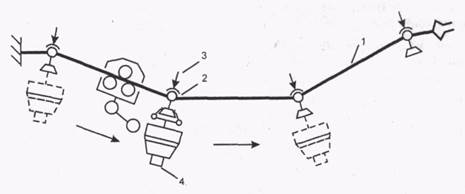
Рис. 3.12. Манипулятор с перемещаемыми приводами:
1 — звенья механизма манипулятора; 2 — шарниры; 3 — фиксаторы (тормоза); 4 — перемещающийся привод шарниров
Дата добавления: 2022-02-05; просмотров: 1101;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
