Типовые законы регулирования и их характеристики
Если в промышленной системе регулирования датчик обратной связи отнести к объекту регулирования, т. е. считать выходным сигналом системы нормированный сигнал датчика, пропорциональный величине регулируемой переменной, то структурная схема промышленной САР примет вид рис. 5.3.
Передаточная функция разомкнутой системы:
 ;
;
Передаточная функция замкнутой системы:





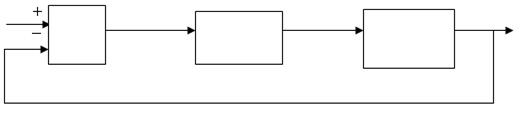
Рис. 5.3
Система будет идеальной, то есть будет отрабатывать задающее воздействие g без ошибки, если  .
.
Однако достичь этого при значительной инерционности объекта и наличии чистого запаздывания невозможно. Если систему с запаздыванием оптимизировать по минимуму квадрата ошибки [4], то в качестве приближения к идеалу можно принять
 ,
,
т.е. система воспроизводит на выходе задающее воздействие g(t), но с запаздыванием на время  (см. рис. 5.4).
(см. рис. 5.4).
 |
Рис. 5.4
При такой передаточной функции Куg(р), передаточная функция разомкнутой системы:

, (5.2)
а желаемая передаточная функция регулятора
 (5.3)
(5.3)
Учитывая, что в полосе пропускания системы  , можно функцию
, можно функцию  разложить в ряд Маклорена и ограничиться в разложении линейными членами
разложить в ряд Маклорена и ограничиться в разложении линейными членами
 . (5.4)
. (5.4)
Подставив (5.4) в знаменатель (5.3) получим

. (5.5)
Подставляя в (5.5) выражения различных передаточных функций объекта регулирования  получим передаточные функции типовых регуляторов.
получим передаточные функции типовых регуляторов.
Так для астатического объекта с чистым запаздыванием, описываемого передаточной функцией

(5.6)
получим пропорциональный регулятор с передаточной функцией

(5.7)

Такой регулятор имеет один параметр настройки
Для безинерционного объекта с чистым запаздыванием при

(5.8)
получим интегральный регулятор
 (5.9)
(5.9)
где 
Этот регулятор также имеет один параметр настройки  .
.
Для инерционного объекта с чистым запаздыванием

, (5.10)
близким к оптимальному будет пропорционально-интегральный закон регулирования

, (5.11)
 где
где 
У такого регулятора два параметра настройки – коэффициент передачи
 и постоянная времени изодрома
и постоянная времени изодрома  – время, когда интегральная составляющая выходного сигнала регулятора станет равной пропорциональной.
– время, когда интегральная составляющая выходного сигнала регулятора станет равной пропорциональной.
Для объектов, описываемых передаточной функцией

, (5.12)
получим пропорционально-дифференциальный (ПД)– регулятор

, (5.13)
с двумя параметрами настройки
и  .
.
Если объект описывается передаточной функцией колебательного звена с запаздыванием

, (5.14)
то для него близким к идеальному будет пропорционально–интегрально–дифференциальный (ПИД) – регулятор с передаточной функцией

(5.15)
У этого регулятора три параметра настройки. Коэффициент передачи регулятора  , постоянная времени изодрома
, постоянная времени изодрома  и постоянная времени предварения
и постоянная времени предварения  .
.
Передаточные функции, логарифмические, частотные и переходные характеристики типовых регуляторов приведены в табл. 5.1.
Типовые законы регулирования являются близкими к оптимальным при управлении объектами с запаздыванием, описывается передаточными функциями первого и второго порядка. Однако получить переходную характеристику вида рис. 5.4, соответствующего звену чистого запаздывания не удается.
 При рассмотренных передаточных функциях объектов и полученных для них типовых законах регулирования передаточная функция разомкнутой системе в соответствии с (5.5) во всех случаях определяется выражением
При рассмотренных передаточных функциях объектов и полученных для них типовых законах регулирования передаточная функция разомкнутой системе в соответствии с (5.5) во всех случаях определяется выражением

Логарифмические амплитудная и фазовая характеристики для таких систем изображены на рис. 5.5.

Рис. 5.5
Фазовая характеристика описывается выражением:

(5.17)
и на частоте среза  фазовый сдвиг достигает -147 град, что обеспечивает запас по фазе только 33 градуса и 50 % перерегулирования переходной характеристики.
фазовый сдвиг достигает -147 град, что обеспечивает запас по фазе только 33 градуса и 50 % перерегулирования переходной характеристики.
Таблица 5.1
| Тип регулятора | Передаточная функция | Логарифмическая частотная характеристика | Переходная функция | ||
| П |

| 
| 
| ||
| И |

| 
| 
| ||
| ПИ |
|  
|  
| ||
| ПД |
| 
| 
| ||
| ПИД |

| 
| 
|
Соответственно переходный процесс отличается от предполагаемого (рис. 5.4), так как на частоте среза разомкнутой системы  , а при определении законов регулирования в разложении
, а при определении законов регулирования в разложении  ограничивались лишь линейными членами, что справедливо при wt << 1.
ограничивались лишь линейными членами, что справедливо при wt << 1.
Понятно, что такой вариант оптимизации не подходит для промышленных объектов, и не только для них. Оптимизация на минимум квадрата ошибки всегда приводит к выбору параметров вблизи границе устойчивости и сильной колебательности процессов. Рекоменбуется в контур управления ввести дополнительный коэффициент от 0.35 до 0.5, чтобы сделать перерегулирование меньше 5 % и показатель колебательности М = 1.
Дата добавления: 2022-02-05; просмотров: 675;
Поиск по сайту
Узнать еще
- II. Основные характеристики микроскопа.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз
- XXVII. ОБЩИЕ ХАРАКТЕРИСТИКИ ГРИБОВ
- А.2 Виды адсорбентов и их характеристики
- Автоматика регулирования
- Автоматические регуляторы и законы регулирования

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
