Одноконтурные и многоконтурные электроприводы
Электроприводы бывают простые одноконтурные и многоконтурные. В зависимости от назначения в электроприводах осуществляется регулирование либо скорости вращения (скоростной привод), либо угла поворота или величины перемещения (сервопривод).
Электроприводы постоянного тока [7, 8, 12] и электроприводы переменного тока с векторным управлением [10] являются наиболее распространенными объектами регулирования различных автоматических систем. Сходство электроприводов в обеспечении вращающего момента за счет сдвига на 90 градусов векторов полей возбуждения и якоря, различие – в способах обеспечения такого сдвига. В двигателе постоянного тока сдвиг обеспечивается коммутацией обмоток якоря коллектором со щетками. В электроприводе переменного тока векторное управление [10] полем статора осуществляется электронным коммутатором в соответствии с вращением ротора электродвигателя. Для управления коммутацией обычно используются сигналы какого либо датчика положения ротора электродвигателя. Что касается структуры, состава контуров управления и регуляторов, электроприводы мало различаются. В дальнейшем будем рассматривать более простой и понятный электропривод постоянного тока.
Типовым примером привода с регулированием скорости вращения являются приводы главного движения различных обрабатывающих станков. Примером привода с регулированием перемещения являются приводы подач обрабатывающих станков, которые обеспечивают заданную величину перемещения инструмента. Причем в этих приводах помимо регулирования величины перемещения осуществляется регулирование и стабилизация скорости перемещения. К системам регулирования электроприводами предъявляются высокие требования по точности регулирования, как положения, так и скорости перемещения, а так же к качеству работы в переходных режимах работы, так как они определяют точность и качество обработки изделий.
6.1.1. Одноконтурный электропривод с ПИД-регулятором скорости.Простые одноконтурные электроприводы состоят из электродвигателя постоянного тока, датчика скорости, регулятора и силового преобразователя для питания двигателя. В одноконтурном, скоростном электроприводе чаще всего используется ПИД-регулятор, обеспечивающий астатическое управление скоростью электродвигателя. С помощью настройки двух нулей ПИД-регулятора удается компенсировать одну постоянную времени объекта, а вторую существенно уменьшить в h раз, на величину ограничения подъема ЛАХ дифференциальной составляющей относительно пропорциональной составляющей ПИД-регулятора. Величина подъема h не может быть слишком большой из физических соображений. Для электроприводов с импульсными силовыми преобразователями h ограничено значением Тя/Ту. Обычно h = (3  10).
10).
Настройкой чисел Ki интегральной, Kp пропорциональной и Kd дифференциальной составляющих компенсируем большую (электромеханическую) постоянную времени и уменьшаем малую (электромагнитную) постоянную времени электродвигателя. Для этого выражаем пропорциональную и дифференциальную составляющие через интегральную следующим образом
Kp = Ki*Tм, Kd = Ki*Tм*Tя
В контуре управления теперь присутствует постоянная времени Ту силового преобразователя и баластная постоянная времени Тб = Тя/h дифференциальной составляющей ПИД-регулятора. Рассчитываем коэффициент усиления и одновременно частоту среза wc разомкнутого контура как деленный на сумму оставшихся в контуре двух постоянных времени коэффициент ke = 0.4
wc = 0.4 / (Ту +Тя/h).
Получаем контур управления с 1.5 % перерегулированием переходной характеристики с длительностью h(t) = 2/wc.
Если выбрать h = Тя/Ту, имеем wc = 0.2/Ту и длительность h(t) = 10*Tу.
При изменении коэффициента ke на 0.3, 0.35 и 0.5 пропорционально изменяется частота среза wc и изменяется перерегулирование соответственно на 0 , 0.5 и 4.5 %. Относительная длительность для процесса без перерегулирования возрастет до 2.2/wc.
Для всех рассмотренных вариантов расчета показатель колебательности АЧХ неизменен М = 1.
Коэффициент интегральной составляющей ПИД-регулятора вычисляем делением коэффициента усиления контура на коэффициенты двигателя 1/Ce, силового преобразователя Ку и датчика скорости Кдс
Ki = wc*Ce/(Ку*Кдс).
Таким образом передаточная функция ПИД- регулятора Wпид(p) имеет вид
Wпид(p) = Kp + Ki/p + Kd*p/(Тя/h*p + 1).
Или для выбранного h = Тя/Ту
Wпид(p) = ((Тя*p +1)*Тм*p + 1)* Ki / (p*(Ту*p + 1).
Контур скорости с ПИД-регулятором хорошо компенсирует моментные возмущения, хуже – параметрические. Увеличение инерционности нагрузки электродвигателя относительно расчётной вызывает увеличение перерегулирования переходной характеристики, что ограничивает область использования одноконтурных электроприводов.
Сервопривод с ПИД-регулятором скорости.Для трансформации скоростного привода в сервопривод необходимо добавить контур регулирования положением. В контур положения войдёт замкнутый контур скорости, редуктор, датчик положения и регулятор положения (П-регулятор) с коэффициентом Крп. Частоту среза контура положения задаём как ke*wc, т.е. всегда меньше частоты среза контура скорости. С учётом коэффициента Кдп датчика положения и коэффициента Кред редуктора имеем
Крп = ke*wc*Кдс / (Кдп*Кред).
Перерегулирование сервопривода определяется коэффициентом ke и мало зависит от перерегулирования входящего в него скоростного привода. Поэтому при расчёте электропривода под сервопривод коэффициент ke целесообразно выбирать = 0.5 или даже больше (0.6 – 0.7), чтобы обеспечить большее быстродействие сервопривода (tnn = 13 Ty) и меньшее перерегулирование.
Многоконтурные системы подчиненного регулирования. Для обеспечения высокого качества работы электропривода, системы управления строятся по принципу подчиненного регулирования как иерархическая 3-х уровневая с регулированием тока, скорости и положения приводного механизма. Для каждого уровня есть свой регулятор и свой датчик. Структурно контуры управления вложены друг в друга и внешние контуры доминируют над внутренними. Имеет место стандартное для иерархической структуры распределение задач и быстродействия: подчинённые задачи должны решаться быстрее. Возможно одновремённое управление сразу тремя переменными, но в конечном итоге будет исполнено задание внешнего контура.
Функциональная схема трехконтурной системы регулирования электропривода приведена на рис. 6.1.
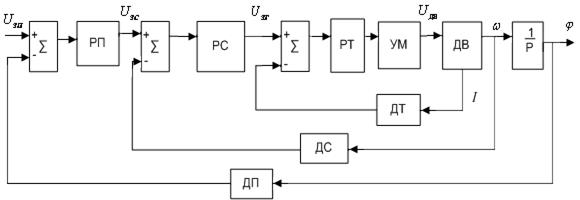
Рис. 6.1
На рисунке: РП, РС, РТ – регуляторы положения, скорости, тока; ДП, ДС, ДТ – датчики положения, скорости, тока;  ,
,  ,
,  – сигналы задания, положения, скорости, тока; УМ – усилитель мощности; ДВ – двигатель.
– сигналы задания, положения, скорости, тока; УМ – усилитель мощности; ДВ – двигатель.
Системы регулирования, построенные по такому принципу, называются системами подчиненного регулирования, так как в них сигнал задания регулятору тока  формируется регулятором скорости, то есть токовый контур подчиняется регулятору скорости. Сигнал задания регулятору скорости формируется регулятором положения, а значит, скоростной контур подчиняется регулятору положения.
формируется регулятором скорости, то есть токовый контур подчиняется регулятору скорости. Сигнал задания регулятору скорости формируется регулятором положения, а значит, скоростной контур подчиняется регулятору положения.
Структура подчиненного регулирования позволяет осуществить регулирование тока якоря, скорости вращения и положения отдельными регуляторами, выбирать желаемые законы регулирования и рассчитывать параметры настроек регуляторов для каждого контура.
Традиционная последовательная, раздельная настройка регуляторов в каждом контуре обеспечивает достаточно хорошие характеристики электропривода. Однако одновременная и согласованная настройка всех регуляторов как единого могдального регулятора позволет достичь лучшего качества управления электроприводом.
Еще одним достоинством схемы подчиненного управления является простота ограничений тока и скорости двигателя в виде ограничений управляющего сигнала на входах контуров тока и скорости.
Дата добавления: 2022-02-05; просмотров: 786;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
