Особенности промышленных объектов и систем регулирования
К промышленным системам регулирования относятся системы регулирования различных технологических установок и промышленных объектов в таких важнейших отраслях промышленности как химия, энергетика, металлургия, нефтепереработка и др. Для некоторых промышленных объектов создаются специализированные регуляторы, но чаще всего задачи автоматизации решаются с помощью универсальных регуляторов общепромышленного назначения, которые конструируются так, чтобы их можно было легко использовать для регулирования различных физических процессов. В таких типовых универсальных регуляторах, относящихся к системе приборов ГСП, реализуются типовые законы регулирования: пропорциональный – П, пропорционально-интегральный – ПИ, пропорционально-интегрально-дифференциаль-ный – ПИД. Для того
чтобы системы автоматического регулирования обладали требуемыми качественными показателями, необходимо при их проектировании и разработке учитывать как динамические характеристики объекта регулирования, так и свойства реальных регуляторов. Промышленные системы регулирования имеют ряд существенных особенностей, которые должны учитываться при их разработке и проектировании.
К таким особенностям можно отнести:
1. Промышленные объекты обладают значительной инерционностью, значительно большей, чем инерционность регулирующих и исполнительных устройств. Кроме того, в каналах передачи управляющих воздействий наблюдается явление транспортного (чистого) запаздывания. Поэтому в большинстве случаев динамика промышленных объектов может быть описана дробно–рациональной функцией с чистым запаздыванием.
2. 
y = 0; 1. (5.1)
3. На промышленные объекты в процессе их нормальной работы действует много различных возмущений, приложенных к разным точкам объекта. Поэтому для управления ими обычно создаются системы автоматического регулирования, работающие по замкнутому циклу (по отклонению) в большинстве случаев одноконтурные или с комбинированным управлением, сочетающим регулирование по отклонению и наиболее существенному возмущению (по разомкнутому циклу). Функциональная схема промышленной системы регулирования изображена на рис. 5.1.

Рис. 5.1
Реализация комбинированного управления позволяет значительно повысить точность регулирования и уменьшает время реакции системы на действие возмущения.
При расчетах промышленных систем регулирования действие совокупности всех возмущений, по которым не осуществляется комбинированное управление, обычно приводят к одному эквивалентному возмущению, приложенному ко входу или выходу объекта (рис. 5.2).
Такое представление возмущения позволяет достаточно просто определить параметры эквивалентного возмущения по осциллограммам изменения регулируемой величины «Y» при отсутствии управления на объект U = const или U = 0.

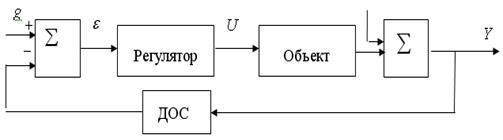
Рис. 5.2
3. Для построения промышленных систем регулирования используются выпускаемые промышленностью приборы и регуляторы систем ГСП, реализующие типовые законы регулирования П, И, ПИ, ПД, ПИД. Поэтому при расчете таких систем главное значение приобретает не задача синтеза закона регулирования, который предопределен возможностями используемых приборов, а выбор одного из возможных типовых законов и расчет параметров его настройки (коэффициента передачи, постоянных времени).
Дата добавления: 2022-02-05; просмотров: 662;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- I Этапы развития САSЕ-систем
- I. История возникновения и развития классно-урочной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
