Устройство и принцип работы микроконтроллера
Микроконтроллер МКП-1 представляет собой микропроцессорное устройство. Его основными конструктивными узлами (рис. 3)являются: корпус 1, пульт управления 2, сетевой фильтр 3, модули источника питания 4-7и функциональные модули 8-13.
К модулям источника питания относятся:
модуль преобразования МПРБ 4;
модуль стабилизатора 5В МСТ 5 5;
модуль стабилизатора 12В МСТ 12 6;
модуль энергонезависимого питания МЭНП 7.
В состав функциональных модулей входят:
модуль ввода дискретных сигналов МВВ 8;
модуль вывода дискретных сигналов МВЫВ 9;
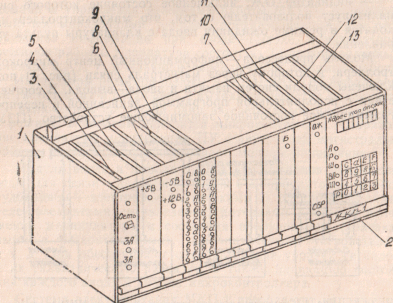
Рисунок 3- Общий вид микроконтроллера МКП-1
модуль памяти МП 10;
модуль процессора МПР 11;
модуль управления МУ12;
модуль энергонезависимого запоминающего устройства МЭНЗУ 13.
Лицевые планки функциональных модулей, модулей источника питания и лицевая панель пульта управления образуют переднюю панель микроконтроллера, содержащую все необходимые органы управления и индикации:
— выключатель СЕТЬ и индикатор напряжения питающей сети;
— индикаторы напряжения стабилизированных источников + 5, +12, —5 В и энергонезависимого питания Б для МЭНЗУ;
— индикаторы состояния входов и выходов микроконтроллера, расположенные на лицевых планках модулей ввода и вывода дискретных сигналов;
— индикатор ОЖ, включенное состояние которого сигнализирует пользователю о том, что микроконтроллер находится в режиме ожидания ввода с клавиатуры пульта управления.
Модуль процессора — информационный центр микроконтроллера, к которому через магистраль связи (рисунок 4) подключены модули систем памяти и ввода—вывода. В соответствии с исполнительной программой, записанной в перепрограммируемое постоянное запоминающее устройство (ПЗУ)
| Система питания |
| Система ввода-вывода |
| Модуль процессора |
| Система памяти |
| Магистраль связи системы питания |
| Магистраль связи системы ввода-вывода |
| Общая магистраль связь |
Рисунок 4- Структурная схема микроконтроллера МКП-1
модуля памяти, МПР осуществляет сбор, цифровую обработку и вывод информации.
В состав модуля памяти кроме ПЗУ входит и оперативное запоминающее устройство (ОЗУ). Оно обеспечивает прием, хранение и выдачу служебной информации (информационная емкость ОЗУ 256 байт).
Исполнительная программа является неотъемлемой частью микроконтроллера, недоступной для пользователя. Ее назначение — в преобразовании инструкций, введенных оператором с пульта управления или поступающих от управляющей программы, в последовательность кодов машинного языка микропроцессора.
Управляющая программа — программа, написанная пользователем в кодах команд входного языка микроконтроллера и обеспечивающая выполнение заданного алгоритма управления манипулятором и технологическим оборудованием. Она размещается в модуле энергонезависимого запоминающего устройства и сохраняется при отключении основного источника питания.
Пульт управления содержит клавиатуру для ввода кодов команд и управления режимами работы МКП-1, однострочный восьмиразрядный дисплей, предназначенный для отображения информации при вводе—выводе, и индикаторы режимов работы. Клавиатура состоит из 16 информационных клавиш О,..., F и клавиши переключения режимов работы Р. Индикаторы режимов работы А, Р, Ш, ВП, ПП выполнены на светодиодах и соединены с выходами регистра индикации. Во включенном состоянии один из светодиодов информирует о режиме, в котором находится микроконтроллер. Сопряжение клавиатуры и индикации ПУ с внутренней магистралью обмена информацией обеспечивает модуль управления.
Модули ввода и вывода дискретных сигналов предназначены для связи микроконтроллера с манипулятором и оборудованием — электропневматическими распределителями, реле, элементами сигнализации, датчиками контроля положения манипулятора и состояния оборудования (контактными и бесконтактными), исполнительными устройствами и т. д. Они обеспечивают преобразование уровней сигналов и их гальваническую развязку, а также индикацию состояния каждого входа и выхода микроконтроллера.
Система электропитания МКП-1 преобразует напряжение сети в стабилизированное напряжение +5 В; —5 В; +12 В, причем напряжение +5 В формируется в МСТ5, а +12 В и —5 В — в МСТ12. Для устранения помех, возникающих в питающей сети при коммутации сильноточных нагрузок, система содержит сетевой фильтр.
МПРБ преобразует переменное напряжение 220 В, 50 Гц в импульсное напряжение прямоугольной формы амплитудой 150 В и частотой 15—25 кГц, а также формирует ряд управляющих сигналов магистрали связи системы питания.
В каждый текущий момент времени микроконтроллер может находиться в одном из пяти режимов работы — ввода программы (ВП), просмотра программы (ПП), ручном (Р), автоматическом (А) и пошаговом (Ш). Конфигурация внутренней структуры микроконтроллера в различных режимах приведена на рисунке 5.
Рисунок 4- Структурная схема микроконтроллера МКП-1
Рисунок 4- Структурная схема микроконтроллера МКП-1
Рисунок 4- Структурная схема микроконтроллера МКП-1
Рисунок 4- Структурная схема микроконтроллера МКП-1
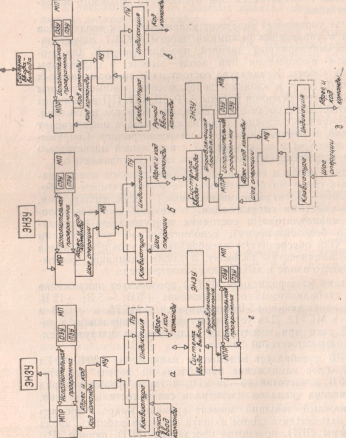
Рисунок 5- Конфигурация внутренней структуры микроконтроллера в различных режимах работы: а) ввод программы; б) просмотр программы; в) ручной; г) автоматический; д) пошаговый
Режим ВВОД ПРОГРАММЫ используется для записи кодов команд управляющей программы в МЭНЗУ. Каждая команда набирается на клавиатуре ПУ. Процессор под управлением исполнительной программы считывает коды нажатых клавиш, формирует из них код команды и пересылает его в МЭНЗУ по адресу, определяемому счетчиком команд, который размещен в ОЗУ модуля памяти. По окончании пересылки содержимое счетчика команд увеличивается на единицу. Вводимая информация совместно с текущим значением счетчика отображается на дисплее.
Работа МКП-1 в режиме ПРОСМОТР ПРОГРАММЫ аналогична работе в режиме ВП, однако направление прохождения информации противоположное. В соответствии с адресом ячейки ЭНЗУ, записанным в счетчике команд, процессор производит считывание содержащейся в этой ячейке информации и выводит ее на индикацию совместно с текущим значением счетчика команд. Содержимое счетчика модифицируется, и процессор переходит в режим ожидания последующего нажатия клавиши, воспринимаемого им как команда вывода содержимого очередной ячейки ЭНЗУ. Режим используется для контроля управляющей программы, хранящейся в памяти микроконтроллера.
В режиме РУЧНОГО управления процессор взаимодействует с пультом управления так же, как в режиме ВВОД ПРОГРАММЫ, но сформированный код команды не записывается в ЭНЗУ, а выполняется. Содержимое счетчика команд (если это не предусмотрено выполненной командой) не изменяется и не индицируется.
АВТОМАТИЧЕСКИЙ режим работы — основной, предназначен для реализации управляющей программы. ЭНЗУ выступает в качестве источника команд, выборку которых процессор осуществляет по адресу, определяемому счетчиком команд. Клавиатура ПУ для ввода кодов команд заблокирована.
Эффективным средством отладки управляющих программ является ПОШАГОВЫЙ режим, в котором процессор выбирает очередную команду, выполняет ее, после чего модифицирует содержимое счетчика команд и переходит в режим ожидания ввода с клавиатуры. Каждое нажатие клавиши, если оно не связано с изменением режима работы, инициирует процессор на выполнение очередного шага программы. В этом режиме пользователь может выполнить управляющую программу в необходимом ему темпе. В паузах между выполнением команд процессор выводит на индикацию адрес (содержимое счетчика команд) и содержимое ячейки ЭНЗУ—код команды, которая будет выполняться на следующем шаге.
Связь между модулями микропроцессора реализуется при помощи трех магистралей (смотри рисунок 4): общей магистрали связи; магистрали связи системы ввода—вывода; магистрали связи системы питания.
Магистраль связи системы ввода—вывода является частью общей магистрали, отличающейся от последней ограниченным набором линий связи. Общая магистраль функционально разделена на четыре группы линий связи: шину адреса; шину данных; шину управления; шину питания.
Адресные сигналы (сигналы линии шины адреса) предназначены для выбора адреса ячейки памяти или регистра системы ввода—вывода. Каждый исполнительный элемент (запоминающая ячейка памяти или регистр системы ввода— вывода) имеет свой собственный адрес, присвоенный ему в пределах адресного поля микроконтроллера, которое для системы памяти образовано сигналами 16-разрядного двоичного кода  , а для системы ввода—вывода — восемью младшими разрядами адресного слова
, а для системы ввода—вывода — восемью младшими разрядами адресного слова  .
.
Таблица 1
Дата добавления: 2022-02-05; просмотров: 897;
Поиск по сайту
Узнать еще
- Cпецифика логопедической работы в остром периоде
- H. Разработка мер по повышению качества работы органа здравоохранения
- I. Понятие о принципах обучения, их взаимосвязь.
- II раздел. Организация работы логопеда в группе для детей с ОНР
- III. Общий принцип сочетания методов в процессе обучения.
- III. Части речи и принципы их классификации
- IV. Выполнение работы
- IV. Выполнение работы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
