Принцип работы робота
Сжатый воздух из пневмосети через запорный вентиль ВН, фильтр-влагоотделитель Ф, регулятор давления Р и маслораспылитель MP поступает по магистралям к распределительным устройствам P1—Р5 блока электропневматических распределителей БЭР и далее —на исполнительные двигатели Ц1—Ц5 (рисунок 2).
Перечисленные устройства предназначены для следующих целей:
— запорный вентиль служит для отключения линии пневмопитания робота от пневмосети;
— фильтр-влагоотделитель предназначен для очистки поступающего сжатого воздуха от влаги и механических примесей;
— регулятор давления (редуктор) обеспечивает настройку и поддержание определенного давления сжатого воздуха (для ЦПР-1—0,4 МПа), поступающего к механизмам робота. Контроль давления осуществляется с помощью реле давления РД. При понижении давления в пневмосети контакты микропереключателя РД размыкают цепь управления роботом;
—: маслораспылитель служит для распыления в потоке сжатого воздуха масла, необходимого для смазки трущихся элементов исполнительных двигателей и распределителей.
Следует отметить, что ВН, Ф, Р, MP конструктивно входят в состав блока подготовки воздуха БПВ.
Блок электропневматических распределителей служит для управления подачей воздуха в исполнительные двигатели. Он включает в себя устройства, с помощью которых осуществляется коммутация пневмолиний. В роботе в качестве распределителей (P1—Р5) применяются клапаны с электромагнитным приводом; управляющие сигналы на них поступают от устройства управления МКП-1, причем каждый исполнительный двигатель робота имеет свой электромагнитный клапан.
Под действием сжатого воздуха, подаваемого в полость цилиндра (Ц1—Ц5), поршень со штоком перемещается в направлении, противоположном полости, которая через распределительное устройство соединяется с атмосферой. Сброс воздуха осуществляется через глушители шума Г1 и Г2.
Для регулировки скорости выходного звена двигателя применяются дроссели с обратным клапаном ДР1—ДР5 (смотри рисунок 2). Они позволяют стабилизировать расход сжатого воздуха, поступающего в полость исполнительного двигателя, и поддерживать заданную скорость движения двигателя за счет дросселирования воздуха из другой, выхлопной полости.
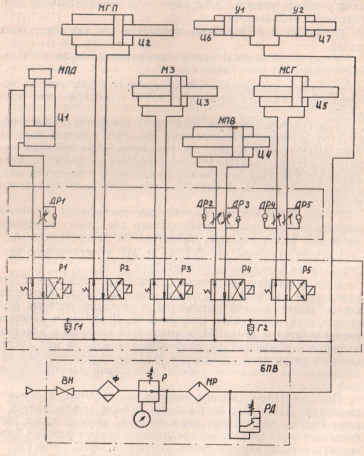
Рисунок 2- Принципиальная пневматииеская схема промышленного робота ЦПР-1П
В конце движения предусматривается гашение энергии и безударное торможение привода. Для этих целей использованы гидравлические и пневматические демпферы. Последние показаны в виде пневмоцилиндров одностороннего действия У1 (Ц6) и У2 (Ц7).
Последовательность перемещений исполнительных двигателей определяется набором программы на устройстве управления МКП-1. Управление механизмами подъема, поворота и горизонтальных перемещений осуществляется по путевому принципу, для чего они снабжены бесконтактными индукционными датчиками. Механизмы сгиба, ротации и захвата подобных датчиков не имеют и работают по временному принципу.
Дата добавления: 2022-02-05; просмотров: 573;
Поиск по сайту
Узнать еще
- Cпецифика логопедической работы в остром периоде
- H. Разработка мер по повышению качества работы органа здравоохранения
- I. Понятие о принципах обучения, их взаимосвязь.
- II раздел. Организация работы логопеда в группе для детей с ОНР
- III. Общий принцип сочетания методов в процессе обучения.
- III. Части речи и принципы их классификации
- IV. Выполнение работы
- IV. Выполнение работы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
