Назначение и состав робота ЦПР-1П
ПРОМЫШЛЕННЫЙ РОБОТ ЦПР-1П
Робот промышленный ЦПР-1П предназначен для автоматизации процесса подачи или удаления деталей в сборочном и штамповочном производстве, а также операций загрузки—разгрузки технологического оборудования.
Он имеет следующие технические характеристики:
Грузоподъемность — 1,0 кг
Число степеней подвижности — 4
Система координат — цилиндрическая
Тип привода — пневматический
Рабочее давление воздуха — 0,4 МПа
Способ управления — цикловой
Число точек позиционирования по каждой
степени подвижности —2
Погрешность позиционирования —, ±0,1 мм
Максимальное горизонтальное перемещение
осуществляемое механизмом
горизонтальных перемещений МГП, 200 мм
Максимальное вертикальное перемещение,
осуществляемое механизмом подъема МПД 100 мм
Максимальное угловое перемещение, осуществляемое
механизмом поворота МПВ 240 град
Максимальное угловое перемещение,
осуществляемое механизмом сгиба МСГ,— 90 град
Максимальное угловое перемещение,
осуществляемое механизмом ротации MP — 180 град
Масса манипулятора —65 кг
Масса стойки управления — 70 кг
Робот ЦПР-1П (рисунок 1) состоит из манипулятора а истойки управления б, которые выполнены раздельными и соединены между собой электрическим кабелем и шлангом подвода воздуха.
В корпусе манипулятора размещается базовый узел — механизм подъема, к нему сверху крепится механизм горизонтальных перемещений, а снизу—механизм поворота. К фланцу механизма горизонтальных перемещений прикреплен механизм сгиба, который при необходимости может быть заменен механизмом ротации. Механизм сгиба (или ротации) оснащен захватом, губки которого также могут быть заменены в зависимости от размеров и конфигурации деталей (объектов манипулирования). Помимо перечисленных механизмов в корпусе имеются блок дросселей и блок электропневматических распределителей.
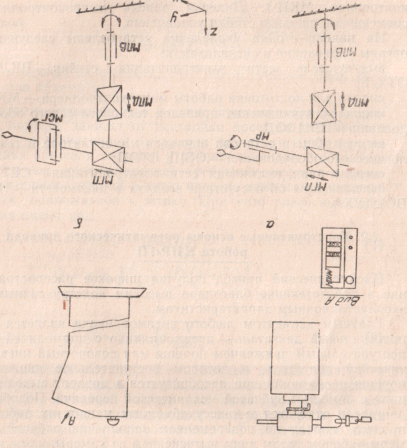
Рисунок 1 - Промышленный робот ЦПР-1П: а — манипулятор; б — стойка управления; кинематические схемы манипулятора: в — с механизмом ротации; г — с механизмом сгиба
Все исполнительные механизмы выполнены на базе пневматического привода.
В состав стойки управления входят: панель управления манипулятором и технологическим оборудованием, блок электропитания, блок подготовки воздуха, а также микроконтроллер МКП-1. Лицевая панель микроконтроллера совмещена с панелью стойки управления.
На панели стойки управления установлены следующие органы управления и сигнализации:
- выключатель сети электропитания стойки — ВКЛ.— ОТКЛ.;
- кнопка для подготовки работы микроконтроллера — МКП;
- кнопка для включения приводов технологического оборудования — ПРИВОД;
- кнопка общего останова приводов манипулятора и технологического оборудования — ОБЩ. СТОП;
- сигнализация включения сети электропитания — СЕТЬ;
- сигнализация об отсутствии воздуха в пневмосети — НЕТ ВОЗДУХА.
Дата добавления: 2022-02-05; просмотров: 821;
Поиск по сайту
Узнать еще
- E) Расчет структурных составляющих очага деформации с одним нейтральным сечением
- II. Химический состав природных воды
- II.2. Химический (молекулярный) состав нефтей и природных газов
- III этап. Составление программного кода
- MATHCAD. Назначение. Основные возможности. Простейшие приемы работы.
- А) Назначение и устройство
- А) Общие требования к составлению уравнений баланса электрической цепи
- А. Сеть и состав архивов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
