Генераторные датчики
Термоэлектрические преобразователи (термопары).
Принцип действия преобразователей этого типа основан на явлении термоэлектрического эффекта Зеебека. Термопара представляет собой
(рисунок 3.5, а) два проводника из разнородных металлов или сплавов, два конца которых спаяны или сварены (горящий спай), а два других свободны (холодные).
Сущность этого эффекта состоит в том, что если два разнородных проводника соединить (рисунок 3.5, а) и место соединения (горячий спай) нагреть, то на свободных (холодных) концах этих проводников появится ЭДС (Е). величина Е этой ЭДС зависит от материалов проводников и от разности температур горячего слоя (Т1) и свободных (Т0) концов.
 , (3.19)
, (3.19)
где  – постоянный коэффициент, не зависящий от геометрических размеров термопары и определяется только материалом обоих проводников.
– постоянный коэффициент, не зависящий от геометрических размеров термопары и определяется только материалом обоих проводников.
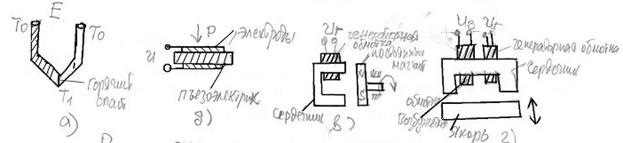
Рисунок 3.5. Конструктивные схемы:
термо (а), пьезо (б) и индукционных (в, г) преобразователей.
Величина Е составляет десятки микровольт.
Зависимость Е термопары от температуры горячего спая при строго постоянной температуре свободных концов определяется путём градуировки. Если такая зависимость (градуировочная характеристика) известна, то по измеряемому значению Е можно определить температуру Т1 горячего спая термопары, помещённого в исследуемую среду.
Практическое значение имеют следующие комбинации материалов, используемых в термопаре: железо-константан, медь-константан, нихром-никель, платинородий-платина.
Диапазон измерения Т1 для термопар (рисунок 3.5, а) составляет от 100 до 2000 oС. Погрешность измерения порядка 2 %. Постоянная времени для миниатюрных термопар не превышает 0,1 с.
К преимуществам термопар можно отнести малую инерционность, широкий диапазон измерения температур и сравнительно высокие точностные характеристики. К основному недостатку термопар следует отнести необходимость обеспечения постоянной температуры свободных концов (холодных спаев).
Пьезоэлектрические преобразователи. Принцип действия пьезоэлектрических преобразователей основан на использовании свойств некоторых кристаллов образовывать на своих гранях электростатические заряды под действием упругих деформаций. Этот так называемый пьезоэффект возникает на кристаллах кварца, турмалина, сегнетовой соли, титана бария и некоторых других веществ. Пьезодатчики позволяют преобразовывать быстро протекающие процессы, так как заряды образуются практически безынерционно.
Конструктивная схема пьезоэлектрического преобразователя приведена на рисунке 3.5, б.
Величина выходного напряжения  , образующая между металлическими электродами (рисунок 3.5, б) при деформации пьезоэлектрического кристалла силой Р определяется выражением.
, образующая между металлическими электродами (рисунок 3.5, б) при деформации пьезоэлектрического кристалла силой Р определяется выражением.
 , (3.20)
, (3.20)
где  – пьезоэлектрический модуль; Р – сила деформации кристалла;
– пьезоэлектрический модуль; Р – сила деформации кристалла;
С0 – суммарная ёмкость преобразователя (кристалла и измерительной схемы).
Из выражения (3.20) следует, что для получения максимального выходного напряжения  пьезопреобразователя следует минимизировать СП. частотный диапазон пьезопреобразователей составляет от единиц герц до 100 кГц при этом погрешность преобразования имеет значение (1...3) %.
пьезопреобразователя следует минимизировать СП. частотный диапазон пьезопреобразователей составляет от единиц герц до 100 кГц при этом погрешность преобразования имеет значение (1...3) %.
Индукционные преобразователи. В индукционных преобразователях используется явление электромагнитной индукции, заключающееся в том, что во всякой индуктивности, в которой меняется величина магнитного потока, наводится (индуктируется) ЭДС. При этом обмотка индуктивности может двигаться в магнитном поле или оставаться неподвижной, а магнитное поле смещается относительно обмотки.
Величина наводимой ЭДС (eU) определяется выражением (3.20). Соотношение ( ) показывает, что eU зависит не от абсолютного значения величины магнитного потока Ф, а от скорости его изменения dФ/dt.
Поэтому индукционные преобразователи применяются преимущественно для измерения скорости линейных и угловых перемещений.
На рисунке 3.5, в, г представлены два вида индукционных преобразователей: в – угловых перемещений и г – линейных перемещений. В преобразователе (рисунок 3.5, в) постоянный магнит (N, S) вращается относительно ферромагнитного сердечника с генераторной обмоткой. В зависимости от скорости вращения постоянного магнита согласно ( ) изменяется выходное импульсное напряжение UГ преобразователя. В преобразователе линейных перемещений (рисунок 3.5, г) используется две обмотки генераторная и обмотка возбуждения (обмотка подмагничивания сердечника постоянным током). Таким образом линейные перемещения якоря относительно сердечника изменяют магнитный поток сердечника и тем самым на выходе генераторной обмотки формируется ЭДС (UГ). Чем выше линейная скорость перемещения якоря тем больше величина dФ/dt и следовательно больше величина UГ.
Погрешности индукционных преобразователей определяются изменением интенсивности магнитного поля с течением времени (старение материала сердечника) и изменением активного сопротивления генераторной обмотки и не превышают 1 %.
Список литературы
1. Епифанов, А. П. Электромеханические преобразователи энергии. –
СПб : Лань. 2004. – 207 с.
2. Буль, Б. К., Электромеханические аппараты автоматики / О. Б. Буль, В. А. Азонов, В. Н. Шоффа. – М. : Высш. школа. 1988. – 303с.
3. Евтихеев, Н. Н. Измерение электрических и неэлектрических величин / Я. А. Купершмидт, В. Ф. Папуловский, В. Н. Снугоров. – М. : Энергоатомиздат. 1990. – 350 с.
4. Бриндли, К. Измерительные преобразователи. – М.: Энергоатомиздат. 1991. – 144 с.
5. Миловзоров, В. П. Электромагнитные устройства автоматики. – М. : Высш. школа. 1983. – 408с.
6. Фираго, Б. И. Теория электропривода: Учеб. пособие / Б. И. Фираго, Л. Б. Павлячик. – Минск : ЗАО «Техноперспектива». – 2004. – 527 с.
7. Фираго Б. И. Регулируемые электроприводы переменного тока: / Б. И. Фираго, Л. Б. Павлячик. – Минск : Техноперспектива, 2006. – 363 с.
Дата добавления: 2022-02-05; просмотров: 730;
Поиск по сайту
Узнать еще
- Акустические датчики
- Взвешивающие устройства АШЛ - датчики натяжения каната
- Гидростатические датчики уровня
- Гирокомпасы как датчики направлений. Принципы работы ГК, их особенности. Эксплутационные проверки.
- Датчики (измерительные преобразователи).
- ДАТЧИКИ ВЫСОТЫ И СКОРОСТИ
- Датчики двигателей с впрыском топлива

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
