Основные характеристики датчиков
Входной величиной преобразователей, представленных на рисунке 3.1, является измеряемый параметр Х (физический параметр) технологического процесса, а выходной – некоторая электрическая величина Y. На преобразователь (датчик) помимо полезного сигнала Х воздействуют помехи в виде вибраций, изменений температуры окружающей среды и нестабильности питающих напряжений, которые являются на ряду с собственными шумами преобразования.
Одной из основной характеристик преобразователей измерительной информации является статическая (градировочная) характеристика (зависимость между выходным сигналом Y и входным сигналом Х) в установившемся режиме.
 . (3.1)
. (3.1)
Статистическая характеристика (3.1) представлена на рисунке 3.2, а.
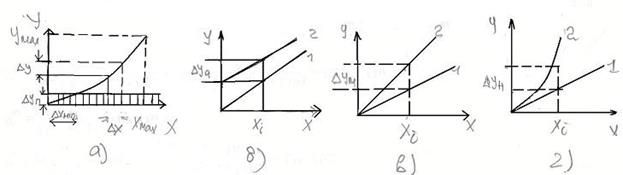
Рисунок 3.2. Статические характеристики датчиков
В большинстве случаев для уменьшения погрешности преобразования стремятся сделать характеристику (рисунок 3.2, а) линейной.
Коэффициент преобразования, характеризующий чувствительность датчика определяет способность измерительного преобразователя реагирования на изменения входного сигнала.
 . (3.2)
. (3.2)
Коэффициент преобразования КП обладает размерностью, зависящей от размерностей входной Х и выходной величины Y. Например, если размерность входной величины (мм), а выходной (В), то размерность  . Для линейной статической характеристики очевидно
. Для линейной статической характеристики очевидно  . Относительный коэффициент преобразования характеризует чувствительность датчика, независящей от размерностей входной и выходной величии (в относительных единицах).
. Относительный коэффициент преобразования характеризует чувствительность датчика, независящей от размерностей входной и выходной величии (в относительных единицах).
 (3.3)
(3.3)
Общая чувствительность датчика состоящего из n последовательно соединенных преобразователей определяется произведением частных чувствительностей.
 . (3.4)
. (3.4)
Порог чувствительности (разрешающая способность) датчика характеризует минимальное изменение входной величины  , которое может быть обнаружено на выходе преобразователя при наличие сигнала помехи
, которое может быть обнаружено на выходе преобразователя при наличие сигнала помехи  (рисунок 3.2, а).
(рисунок 3.2, а).
Динамический диапазон преобразования входных величин, датчиком представляет собой диапазон входных величин (  ), для которых нормирована допустимая погрешность.
), для которых нормирована допустимая погрешность.
Вследствие изменения внутренних свойств отдельных элементов датчика (износ, старение) или изменения внешних условий (изменение температурного режима и напряжения питания) возникают погрешности преобразования.
Различают абсолютную погрешность (разность между полученным
значением выходной величины  и градуировочным (расчетным) ее значением Y).
и градуировочным (расчетным) ее значением Y).
 . (3.5)
. (3.5)
Относительную погрешность – отношение абсолютной погрешности к действительному значению выходной величины.
 . (3.6)
. (3.6)
Приведенную относительную погрешность – отношение абсолютной погрешности к максимальному значению выходной величины.
 . (3.7)
. (3.7)
Применительно к статической характеристике (рисунок 3.2, а) следует различать: представленную на рисунке 3.2, б аддитивную  (под действием дестабилизирующих факторов параллельное смещение статической характеристики); мультипликативную
(под действием дестабилизирующих факторов параллельное смещение статической характеристики); мультипликативную  (рисунок 3.2, в), приводящую к изменению коэффициента преобразования и погрешность нелинейности
(рисунок 3.2, в), приводящую к изменению коэффициента преобразования и погрешность нелинейности  (рисунок 3.2, г).
(рисунок 3.2, г).
Большинство используемых в системах управления датчиков по характеру динамических свойств можно отнести к безоперационным и апериодическим звеньям и их инерционность может быть определена постоянной времени Т.
Дата добавления: 2022-02-05; просмотров: 531;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- II. Основные положения
- II. Основные характеристики микроскопа.
- II. Языкознание и его основные разделы.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Основные направления развития воспитания
- III. Основные требования к организации рассмотрения обращений граждан
- III. Основные функции ГФС России

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
