Тяговый электромагнит
Тяговый электромагнит является основным элементом, реализующим линейные и круговые перемещения подвижных объектов в электромагнитных исполнительных устройствах. На примере системы стабилизации усилия сжатия схвата робота (рисунок 2.1) очевидны преимущества электромагнитного привода по сравнению с электрическими двигателями при перемещении подвижных элементов на небольшие расстояния (до 100 мм) с тяговыми усилиями в диапазоне от 0 до 100 Н.
К таким преимуществам можно отнести сравнительно высокое быстродействие (время перемещения не более десятков миллисекунд), высокая точность (точность расположения объекта в начальной и конечной точках перемещения определяется погрешностями размещения механических ограничителей или упоров), простота конструкции и высокая надежность.
На рисунке 2.2 представлена конструкция линейного нереверсивного (нейтрального) электромагнита. В исходном состоянии под действием возвратной пружины якорь смещается до соприкосновения упора 2 с корпусом в положение с максимальным воздушным зазором  (первое устойчивое положение).
(первое устойчивое положение).
При подключении катушки электромагнита к источнику напряжения или тока возникает постоянное магнитное поле, которое формирует на упорах 1, 2 (полюсных наконечниках) разноименные полюса S, N.
Таким образом между полюсами S, N возникает сила электромагнитного притяжения (электромагнитная сила Pэ), которая перемещает якорь до соприкосновения упоров 1, 2 в положение с минимальным воздушным зазором (второе устойчивое состояние).
Рисунок 2.2. Тяговый электромагнит
Параметр Pэ является тяговой характеристикой электромагнита, для его определения необходимо знать энергию электромагнита
 . (2.9)
. (2.9)
При отсутствии насыщения в ферромагнитном корпусе и якоре, характеристика Ф(I0) линейна тогда:
 . (2.10)
. (2.10)
Или с учетом (2.10)
 . (2.11)
. (2.11)
Энергия магнитного поля (2.11) в процессе линейного перемещения якоря по оси Х (ось Х совпадает с осью якоря) преобразуется в механическую в виде работы силы Pэ электромагнитного притяжения (производной от Θ по Х).
 . (2.12)
. (2.12)
Поскольку проводимость Gм магнитной системы с воздушным зазором  определяется проводимостью G0 воздушного зазора
определяется проводимостью G0 воздушного зазора  , то для плоскопараллельного воздушного зазора (рисунок 2.2) можно записать
, то для плоскопараллельного воздушного зазора (рисунок 2.2) можно записать
 , (2.13)
, (2.13)
где  , переходя к координате
, переходя к координате  , получаем
, получаем
 . (2.14)
. (2.14)
Знак минус в выражении (2.14) показывает, что положительному электромагнитному усилию Pэ соответствует уменьшение воздушного зазора l0 .
Окончательно с учетом того, что Fнс = I0W0 получаем
 . (2.15)
. (2.15)
Тяговая характеристика (2.15) представлена на графике (рисунок 2.3)
 Рисунок 2.3. Тяговые характеристики (а) и коническая конструкция
Рисунок 2.3. Тяговые характеристики (а) и коническая конструкция
полюсных наконечников электромагнита (б)
Недостатком характеристики Pэ (рисунок 2.3, а) является ее высокая крутизна при небольших воздушных зазорах . Для устранения данного
недостатка необходимо использовать коническую форму полюсных наконечников электромагнита (рисунок 2.3, б). При этом согласно чертежу (рисунок 2.3, б) Sмк = Sм/cos α , а тяговое усиление электромагнита с конусными наконечниками составит
Рэк = Pэ /cos2 α (2.16)
Быстродействие электромагнита определяется временем tср его срабатывания, т.е tср – время от момента подачи импульса на срабатывание до момента перемещения якоря из одного устойчивого положения в другое. Время срабатывания состоит в основном из двух составляющих
tср = tтр + tдв, (2.17)
где tтр – время трогания (промежуток времени с момента подачи импульса напряжения в катушку электромагнита до момента начала движения якоря до полной его остановки).
Наличие ферромагнитных материалов (корпус, якорь) и сравнительно большое количество витков W0 (и следовательно L0) катушки электромагнита (рисунок 2.2) делает параметр tтр преобладающим над tдв. Обычно для  tдв = (0,1 – 0,3) tтр.
tдв = (0,1 – 0,3) tтр.
Для оценки величины tтр воспользуемся эквивалентной схемой включения электромагнита (рисунок 2.4).
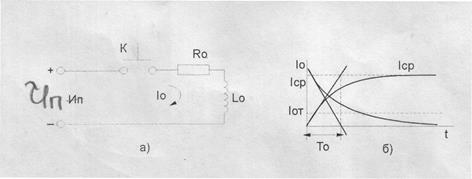
Рисунок 2.4. К оценке переходных процессов электромагнита:
а) схема включения, б) графики функций I0(t) от времени t
При подключении электромагнита (ключом К) к источнику питания Uп переходной процесс в схеме (рисунок 2.4, а) описывается дифференциальным уравнением срабатывания
 (2.18)
(2.18)
где R0 – активное сопротивление обмотки электромагнита.
Решая уравнение (2.18) относительно I0 получим экспоненциальную функцию изменения тока Iср = I0 срабатывания электромагнита
 (2.19)
(2.19)
где Т0 – постоянная времени обработки электромагнита.
График функции (2.19) представлен на рисунке 2.4,б, из него следует, что время срабатывания не превышает
 . (2.20)
. (2.20)
Процесс возврата (отпускания) якоря электромагнита в исходное состояние описывается дифференциальным уравнением
 (2.21)
(2.21)
Результатом решения уранения (2.21) является экспоненциальная функция отпускания якоря (I0 = Iот)
 (2.22)
(2.22)
представлен на рисунке 2.4, б.
Из уравнения (2.22) и графика Iот (рисунок 2.4,б) следует, что время отпускания tот = 3Т0 или возврата якоря электромагнита в исходном состоянии можно оценить соотношением (2.20).
Абсолютная погрешность позиционирования якоря электромагнита (рисунок 2.2) в двух устойчивых положениях определяется точностью размещения упоров 1, 2 и может достигать единиц микрон. При этом обеспечивается высокая степень проверяемости результатов дискретного перемещения якоря электромагнита.
Данное свойство электромагнитов наряду с высоким быстродействием, позволяет их эффективно использовать в устройствах позиционирования деталей для гибких производственных систем (ГПС).
Конструкция электромагнита (рисунок 2.2) предусматривает нереверсивное перемещения якоря (независимо от изменения полярности включения катушки электромагнита якорь перемещается в одном направлении).
Однако на практике часто необходимо обеспечить реверсивное (с изменением направления) перемещение якоря электромагнита.
На рисунке 2.5, а представлен один из вариантов конструкции реверсивного (поляризованного) электромагнита дифференциального типа с поступательным (плавным) перемещением якоря.
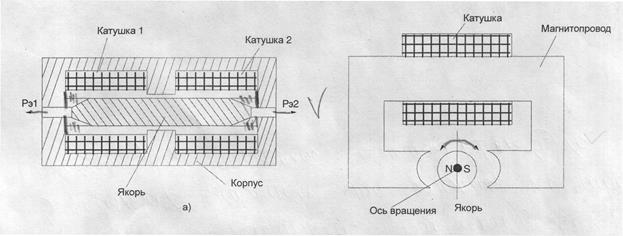
Рисунок 2.5. Конструкции реверсивных (поляризованных)
электромагнитов а) с поступательным движением якоря,
б) с круговым движением якоря
Основное отличие многофункционального электромагнита (рисунок 2.5, а) от нереверсивного (рисунок 2.2) заключается в наличии в нем двух катушек , включенных в дифференциальную схему управления. Таким образом, изменяя разность токов (с учетом знака разности) управления обеими катушками, представляется возможным перемещать якорь в одном из направлений Pэ1 , Pэ2 с заданной скоростью. Существенным преимуществом электромагнита (рисунок 2.5) является возможность позиционирования якоря в промежуточных точках данных направлений.
Если необходимо реализовать реверсные круговые движения якоря целесообразно использовать электромагнит, представлений на рисунке 2.5,б. Поляризация (реверсные свойства) здесь осуществляется путем применения постоянного магнита (N, S) который служит в качестве якоря и имеет цилиндрическую форму. Он намагничен по диаметру и располагается в цилиндрической выточке магнитопровода.
Когда ток в катушке отсутствует, постоянный магнит удерживается пружиной в таком положении, что полюсы (N, S) его размещают вертикально. При включении постоянного тока катушки, магнит (якорь) стремится повернуться так, что бы полюсы его расположились горизонтально. В зависимости от направления тока в катушке якорь будет поворачиваться в ту или другую сторону.
Вращающий момент Мэ такого типа электромагнита можно определить по аналогии с тяговым усилием (2.13) линейного электромагнита по формуле:
 (2.23)
(2.23)
где  – производная по углу поворота якоря.
– производная по углу поворота якоря.
Дата добавления: 2022-02-05; просмотров: 774;
Поиск по сайту
Узнать еще
- Iт – обратный тяговый ток; М – тяговый двигатель электропоезда.
- А. Метод частотного и дистанционного зондирования гармоническим электромагнитным полем (прил. 60—64)
- АВТОНОМНЫЙ ТЯГОВЫЙ ПОДВИЖНОЙ СОСТАВ
- Б. Метод зондирования становлением электромагнитного поля (прил. 65—77)
- Барабанный колодочный тормоз и его электромагнитный привод.
- В качестве каких контакторов на ТБ используется электромагнитный контактор КПД-110Е. Перечислите назначение этих контакторов.
- В. Дипольное электромагнитное и индуктивное профилирование
- ВЗАИМОДЕЙСТВИЕ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ С ВЕЩЕСТВОМ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
