Датчики (измерительные преобразователи).
Датчики являются приемными элементами систем АиТ и служат для преобразования управляющей физической величины, подаваемой на вход системы, в другую физическую величину иного или того же вида энергии, удобную для воздействия на последующие элементы системы.
В общем случае датчик состоит из трех основных частей: воспринимающей, промежуточной и исполнительной.
Воспринимающая часть реагирует на изменение определенной физической величины, поступающей на вход датчика, и передает ее в преобразованном виде на промежуточную часть. В промежуточной части преобразованная физическая величина сравнивается с аналогичным по роду физическим параметром, значение которого является эталоном для измерения воздействия на исполнительную часть датчика.
Датчики, которые содержат промежуточную часть, называются датчиками с промежуточным преобразованием. Такие датчики применяются в тех случаях, когда по физическим или техническим причинам управляющий параметр, подаваемый на вход, затруднительно или невозможно непосредственно преобразовать в требуемую физическую величину на выходе.
Эти датчики состоят из нескольких датчиков с непосредственным преобразованием, которые работают последовательно. При этом выходная величина одного датчика является выходной величиной следующего.
У датчиков с непосредственным преобразованием отсутствует промежуточная часть, а воспринимающая и исполнительная части составляют одно целое.
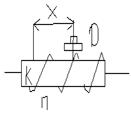
Так, например, в датчике, измеряющем длину детали, при изменении длины контролируемой детали на величину x мерительная ножка перемещается на величину  , что изменяет воздушный зазор d, и индуктивность L магнитной цепи. В Соответствии с этим меняется величина тока в следующем элементе А.
, что изменяет воздушный зазор d, и индуктивность L магнитной цепи. В Соответствии с этим меняется величина тока в следующем элементе А.
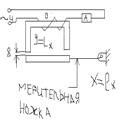 Этот датчик с непосредственным преобразованием
Этот датчик с непосредственным преобразованием
Для преобразования напряжения в частоту может быть использован датчик с промежуточным преобразованием следующей структуры:
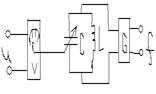
Напряжение U измеряется вольтметром V, стрелка которого связана с конденсатором переменной емкости. Конденсатор С включен в задающий контур генератора G, частота f на выходе которого зависит от емкости С. Таким образов происходит преобразование U ® C®f.
В зависимости от типа измеряемой величины датчики классифицируются следующим образом:
1. датчики электрических величин
2. тепловых величин
3. параметров измерений
4. давления
5. скоростей и ускорения
6. расходов
7. ориентации
8. угловых координат
9. звукового давления, звуковых колебаний
 Датчики 1 типа фиксируют напряжение, силу тока, активные сопротивления, индуктивности, емкости, частоты, фазы, параметры диэлектрических и ферромагнитных материалов, величины магнитного потока.
Датчики 1 типа фиксируют напряжение, силу тока, активные сопротивления, индуктивности, емкости, частоты, фазы, параметры диэлектрических и ферромагнитных материалов, величины магнитного потока.
Датчики 2 типа используются для определения температур
- низких (термометры)
- средних (термисторы, термопары)
- высоких (спец термометры, оптические пирометры, радиолокационные пирометры, цветовые пирометры)
Датчики 3 типа используются для определения параметров потоков пучков заряженных частиц, плотности нейтронного потока, уровня g- излучения, уровня напряженности магнитного поля .
Датчики 4 типа применяют при измерениях перемещения, нахождении линейных или угловых размеров, изготовлении или разбраковке деталей, определении скоростей и ускорений, уровней жидкости.
Датчики 5 типа строятся на основе применения мембран, тензометров, магнитоупругих элементов и используется при вычислении величин давления.
Датчики 6 типа подразделяются на объёмные и массовые.
К объёмным относятся тахометрические, ультразвуковые, индукционные и оптические датчики.
К массовым относятся те, в которых измеряемому веществу сообщается дополнительное движение. В них измеряется усилие от действия ускорения свободного падения или гироскопический эффект.
Датчики 7 типа измеряют углы и угловые скорости объектов в пространстве. Чувствительными элементами в таких датчиках являются разного рода гироскопы (с вращающимся ротором, камертопом, электровибраторами).
Датчики 8 типа позволяют определять узловые координаты и дальности движущихся объектов. Строятся они с применением радиолокационного, лазерного и оптоэлектронного преобразований.
В датчиках 9 типа для регистрации звуковых давлений и колебаний используются механические, электродинамические, пьезорезисторные элементы.
По форме выходного сигнала датчики бывают аналоговыми и дискретными.
В аналоговых датчиках, непрерывному изменению измеряемой координаты или процесса соответствует непрерывное изменение выходного сигнала датчика.
В дискретных датчиках выходной сигнал изменяется при превышении входной величины определенных пределов.
Простейшие датчики с непосредственным преобразованием входной величины в активное сопротивление R на выходе основаны на зависимости :

Существуют датчики, у которых под действием входной величины значение R на выходе изменяется за счет изменения трех физических величин правой части выражения.
Реостатные датчики.
Широко распространены реостатные датчики, которые преобразуют механические величины, в частности перемещения и удлинения, в изменении активных сопротивлений.

 В датчике линейных перемещений с обмоткой из однородной проволоки П одинакового сечения, равномерно намотанной на цилиндрический каркас К при перемещении ползунка D реостата на величину х пропорционально перемещению задающего элемента (входной величины) изменяется сопротивление R реостата (выходная величина датчика), которое включается во входную цепь следующего элемента системы.
В датчике линейных перемещений с обмоткой из однородной проволоки П одинакового сечения, равномерно намотанной на цилиндрический каркас К при перемещении ползунка D реостата на величину х пропорционально перемещению задающего элемента (входной величины) изменяется сопротивление R реостата (выходная величина датчика), которое включается во входную цепь следующего элемента системы.
 Особенность реостатного датчика – это дискретность изменения выходной величины R в функции от перемещения ползунка х или, иначе говоря, от входной величины . При перемещении ползунка реостата значение R изменяется последовательными скачками на величину сопротивления полного витка.
Особенность реостатного датчика – это дискретность изменения выходной величины R в функции от перемещения ползунка х или, иначе говоря, от входной величины . При перемещении ползунка реостата значение R изменяется последовательными скачками на величину сопротивления полного витка.

Скачкообразное изменение сопротивления датчика вызывает появление погрешности ступенчатости, которая определяется по формуле :
В%= 100/n, где n – число витков реостата в пределах всего расчетного диапазона изменения выходной величины.
Для снижения погрешности n берут равным нескольким сотням и даже тысячам.
При необходимости получить сложный закон изменения R в функции x применяют фигурные каркасы, сечения и материалы проводов на различных участках каркаса.
Для преобразования изменения удлинений и механических напряжнений в изменения активного сопротивления широкое применение находят проволочные датчики или иначе тензодатчики.
Тензодатчик состоит из проволоки П с высоким удельным сопротивлением, диаметром 0,02-0,05 мм, наклеенной на плотную бумагу Б в виде ряда петель длинной 10-25мм.
 Датчик прочно наклеивается на деталь в направлении ее удлинения. При деформации испытуемой в месте и вдоль наклеенного датчика одновременно меняется значения L, S и r проволоки датчика, а следовательно, будет изменяться и R. При этом величина DR/R пропорциональна деформации на поверхности детали.
Датчик прочно наклеивается на деталь в направлении ее удлинения. При деформации испытуемой в месте и вдоль наклеенного датчика одновременно меняется значения L, S и r проволоки датчика, а следовательно, будет изменяться и R. При этом величина DR/R пропорциональна деформации на поверхности детали.
Ориентируя тензодатчики на поверхности детали различным образом можно определить не только величину деформации, но и ее направление.
Для преобразования световой энергии в активное сопротивление широко используются фотосопротивления. Освещение таких элементов как селен, сернистый свинец и фазонами лучистой энергии приводит к освобождению электронов из кристаллической решетки диэлектриков и полупроводников, что повышает их электропроводность.
Для непосредственного преобразования изменения температуры в изменение активного сопротивления применяются термодатчики с использованием зависимости сопротивления проводников и полупроводников от температуры. Наибольшее распространение получили термические датчики из полупроводников часто называемые термисторами. Термисторы отрицательным температурным коэффициентом, который по абсолютному значению в 10-20 раз больше аналогичного коэффициента чистых металлов. Эти датчики изготавливаются методом спекания порошковых металлов в твердую массу из закиси никеля в соединение с окислами марганца, смеси окислов марганца, никеля и кобальте.
Зависимость сопротивления термисторов RT от температуры в ее рабочем диапазоне выражается экспоненциальным законом:
где  -удельное сопротивление термистора,
-удельное сопротивление термистора,
и В – постоянные, зависящие от физических свойств материала термистора,
Т- температура в градусах абсолютной шкалы.
Термисторы также используются в качестве датчиков скорости течения жидкостей и газов, лучистой энергии и др.
Датчики с изменяющейся на выходе величиной индуктивности могут применяться лишь с питанием от переменного тока. В этой группе датчиков изменяющимся параметром на выходе является индуктивное сопротивление  .
.
Индуктивные датчики широко используются для преобразования небольших изменения линейных размеров, медленных перемещений, деформаций и усилий. Простейший датчик этой группы рассматривался нами ранее (первый рисунок). Этот датчик не получил распространения ввиду действия на якорь силы притяжения при протекании тока по обмотке датчика. Кроме того, на его работу оказывает сильное влияние колебания величины и частоты напряжения.
Чаще применяется индуктивный датчик с двумя дросселями, включаемыми по мостовой или дифференциальной схеме(см. рисунок ниже).
При среднем положении якоря, когда d1=d2, выходное напряжение Uн =0. Если якорь Я отклоняется от среднего положения вниз, то d1<d2, а  >
>  и появится выходное напряжение Uн тем большее, чем большее отклонение якоря от среднего положения.
и появится выходное напряжение Uн тем большее, чем большее отклонение якоря от среднего положения.
Дифференциальный датчик имеет вдвое большую чувствительность и значительно меньшую погрешность, чем простой индуктивный датчик.
Индуктивные датчики применяются также для преобразования усилий. У таких датчиков используется зависимость магнитной проницаемости m ферромагнитных материалов от величины механических напряжений в них (магнитоупругий эффект).
Конструктивно датчики м.б. выполнены с поворотным якорем, с прямоходовым якорем и соленоидного типа.
Датчик соленоидного типа.
При необходимости фиксация значительных прямоугольных перемещений применяются датчики соленоидного типа, соединенные по дифференциальной схеме.
Дифференциальная схема
соленоидного датчика.
Дифференциальная система включения датчика уменьшает действующее на якорь усилие и устраняет влияние температуры вследствие того, что одновременное изменение сопротивления обмоток, расположенных в двух соседних плечах схемы, не вызывает его дисбаланса.
Величины, связывающие выходное напряжение с параметрами мостовой схемы, связаны между собой следующим соотношением:

где -изменение полного сопротивления одной половины обмотки при перемещении сердечника от среднего положения;
Z - полное сопротивление обмотки датчика.

Датчик позволяет фиксировать правостороннее перемещение сердечника по отношению к среднему положению.
Ток, протекающий по сопротивлению нагрузки будет:

При выборе параметров датчика и сопротивления нагрузки следует стремиться к выполнению условия  ZH>Z по крайней мере в 5 раз.
ZH>Z по крайней мере в 5 раз.
Конструктивной разновидностью индуктивных датчиков, являются трансформаторные датчики, широко применяемые в устройствах промышленной автоматики.
Трансформаторный датчик имеет три обмотки. Одна из них – первичная, получает питание от источника » тока. Две другие 2-я и 3-я обмотки соединены встречно и имеют одинаковые параметры и на их выходных клеммах измеряется напряжение, пропорциональное перемещению сердечника Х.
При среднем положении сердечника наводимые в катушках 2 и 3 ЭДС равны, 2 т.к. они направлены встречно, то Uвых = 0.
Напряжение на выходе появляется лишь при отклонении сердечника от среднего положения и определяется разностью между ЭДС 2-й и 3-й обмоток.
 Uвых=U2-U3
Uвых=U2-U3
Линейность характеристики индуктивного датчика сохраняется только на некотором участке и нарушается в том случае, когда активное сопротивление становится соизмеримым по величине с индуктивным.
Преимущества индуктивных датчиков:
1) отсутствие контактных соединений;
2) высокая чувствительность;
3) незначительная погрешность от изменения температуры и амплитуды питающего напряжения.
Недостатки:
1) сравнительно большие массогабаритные показатели;
2) зависимость характеристики от частоты питающего напряжения Df=50 Гц¸5кГц.
Практическая точность индуктивных датчиков может достигать пределов от 0,1 до 1,5%.
В настоящее время разработчики занимаются лишь выбором необходимых датчиков.
При проектировании систем автоматики выбор датчиков осуществляется по следующим параметрам:
-величина перемещения сердечника;
-усилие, действующее на сердечник;
-требуемая чувствительность;
-характер и величина нагрузки;
-параметры питающего и выходного напряжения.
Емкостные датчики.
У емкостных датчиков входной величиной является линейное или угловое перемещение, а выходной – изменение электрической емкости под действием этого перемещения.
Для датчиков линейного перемещения входной величиной является перемещение Х.

Для датчиков углового перемещения – входной величиной является угол поворота.

Выходной величиной для обоих типов датчиков является изменение эл. емкости.
Находят также применение емкостные датчики цилиндрической формы ( соленоидного типа).

Для датчиков с прямоугольными пластинами конденсатора, регистрирующими линейные перемещения, выражение для чувствительности можно получить из формулы для емкости плоского конденсатора:
 где
где  - диэлектрическая проницаемость среды,
- диэлектрическая проницаемость среды,
S – активная площадь конденсатора (площадь пластин).
При этом чувствительность равна:

Выражение для чувствительности емкостного датчика с угловым перемещением можно получить на основе формулы:
 где S - активная площадь конденсатора при a=0
где S - активная площадь конденсатора при a=0
d – расстояние между подвижными и неподвижными пластинами.
Тогда чувствительность:

Емкость датчика соленоидного типа:
 где х – величина перекрытия внутреннего цилиндра наружным;
где х – величина перекрытия внутреннего цилиндра наружным;
r1 – радиус внутреннего цилиндра;
r2 – радиус внешнего цилиндра.
Чувствительность:
Использование емкостных датчиков при частоте питающего напряжения 50Гц и менее невозможно без применения специальных усилителей, т.к. они в этом случае представляют большое сопротивление.
Поэтому такие датчики используются на высоких частотах – 2, 14, 120 кГц.
Недостатки емкостных датчиков:
1. Необходимость усиления выходного сигнала;
2. Большое влияние паразитных емкостей соединительных проводов и монтажа;
3. Потребность в источнике питания специальной формы.
Применение.
Кроме фиксации линейных и угловых перемещений емкостные датчики применяются для контроля местонахождения объектов, охраны помещений, определения линейных размеров при контроле деталей.
Одним из емкостных принципов преобразования является также пьезоэлектрический эффект, при котором изменение измеряемой величины превращается в изменение электростатического заряда или напряжения, возникающих в некоторых материалах при их механическом напряжении. Напряжение образуется под действием сил сжатия, растяжения или изгиба, которые являются измеряемой, величиной и воздействует на чувствительный элемент.

В качестве пьезоэлектрического материала, применяемого в конструкции такого преобразователя:
1.природные кристаллы, такие как кварц.
2.синтетические кристаллы (сульфат натрия).
3.поляризованная ферромагнитная керамика.
Дата добавления: 2021-02-19; просмотров: 1140;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
