Классификация датчиков
Из приведённой на рисунке 3.1 структурной схемы следует, что точностные характеристики большинства существующих систем управления техническими объектами определяются чувственностью преобразователей измерительной информации (датчиков).
Датчик – это устройство, реагирующее на изменение параметров технологического процесса, режима работы машин и аппаратов и осуществляющее непрерывное преобразование измеряемой физической величины (сила, давление, скорость, температура, расход, линейные и круговые перемещения) в другую, удобную для использования в системах управления величину (аналоговый и дискретный электрический сигнал).
В настоящее время любую физическую величину можно преобразовать в электрический сигнал.
Преобразователи измерительной информации (датчики) можно классифицировать:
- по виду входной величины – преобразователи неэлектрической (физической) величины в электрическую; преобразователи одной электрической величины в другую (датчики тока, напряжения);
- по виду преобразования – аналоговые (потенциальные, токовые, частотные, фазовые) и дискретные (амплитудно-импульсные, времяимпульсные, число-импульсные и колово-импульсные);
- по характеру преобразования входной величины в выходную – параметрические и генераторные.
Параметрические датчики – это датчики, в которых изменение входной неэлектрической величины преобразуется в изменение какого-либо параметра электрической цепи (активного сопротивления, индуктивности, взаимной индуктивности, ёмкости).
При включении параметрического преобразователя в электрическую цепь с источником питания его выходной величиной будет электрический сигнал, один из параметров которого ток, напряжение, амплитуда, частота и фаза переменного тока; параметры импульсных сигналов отражают значение входной величины.
В генераторных преобразователях (датчиках) происходит непосредственное преобразование входной неэлектрической величины в электрический сигнал (ЭДС) без подвода энергии питания (датчики термо-ЭДС, пьезоэлектрические, индукционные, датчики на основе эффекта Холла).
Всё разнообразие структур построения датчиков можно представить в виде трёх основных структур, представленных на рисунке 3.1.
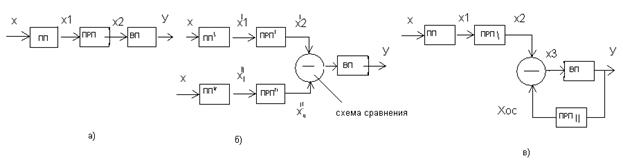
Рисунок 3.1. Структура построения датчиков (Х – входной сигнал, Y – выходной сигнал, ПП – первичный преобразователь, ПРП – промежуточный преобразователь, ВП – выходной преобразователь
На рисунке 3.1, а изображена последовательная структура построения датчиков. В данном случае входной сигнал Х (измеряемая неэлектрическая величина, например, давление Р) поступает на вход первичного преобразователя (ПП), где преобразуется в другую неэлектрическую величину Х1 (например, линейное перемещение  ). В качестве первичного преобразователя Р
). В качестве первичного преобразователя Р  в схеме рисунок 3.1, а можно использовать мембрану или сильфон. Сигнал Х1 ( ) поступает на вход промежуточного преобразователя в электрическое напряжение Х2(U). Такой вид промежуточного преобразования U можно реализовать с помощью тензурезисторных преобразователей.
в схеме рисунок 3.1, а можно использовать мембрану или сильфон. Сигнал Х1 ( ) поступает на вход промежуточного преобразователя в электрическое напряжение Х2(U). Такой вид промежуточного преобразования U можно реализовать с помощью тензурезисторных преобразователей.
Обычно датчики находятся на значительном расстоянии от центрального процесса системы управления и преобразуемые сигналы необходимо передавать по каналам связи. Сигнал Х2(U) не может быть непосредственно передан по каналам связи из-за высокой вероятности его поражения сигналом помехи. Поэтому в схему (рисунок 3.1, а) введён выходной преобразователь (ВП). Основной функцией ВП является преобразование сигнала Х2(U) выходной сигнал Y, представленной в форме удобной для помехоустойчивой передачи по каналам связи (в виде токового сигнала, цифрового кода).
Структурная схема (рисунок 3.1, б) представляет дифференциальный принцип преобразования измерительной информации. В отличие от схемы (рисунок 3.1, а) в данной схеме используются два идентичных канала с последовательным преобразованием (ПП′, ПРП′ и ПП′′, ПРП′′), выходные сигналы которых Х2′, Х2′′ в схеме сравнения суммируются, а сигналы помехи (температурный дрейф) вычитались, таким образом, осуществляется компенсация постоянной составляющей сигналов Х2′, Х2′′ и аддитивные погрешности (погрешности температурного дрейфа).
Дифференциальные преобразователи (датчики) обладают более высокой точностью, большей линейностью статистической характеристики и более высокой чувствительностью, чем преобразователи (рисунок 3.1, а).
Компенсационные измерительные преобразователи (рисунок 3.1, в) построены на принципе автоматического уравновешивания в схеме сравнения, преобразованной измеряемой величины Х2, компенсирующей величиной  сигнала обратной связи. В качестве примера компенсационных преобразователей можно отметить рычажные весы, у которых измеряемый вес уравновешивается (компенсируется) эталонными гирями.
сигнала обратной связи. В качестве примера компенсационных преобразователей можно отметить рычажные весы, у которых измеряемый вес уравновешивается (компенсируется) эталонными гирями.
В компенсационных преобразователях (рисунок 3.1, в) происходит компенсация мультипликативных (изменяющих во времени коэффициент преобразования) погрешностей. При этом точность преобразования измерительных сигналов определяется стабильностью работы звена (ПРП2) обратной связи. На результат преобразования в схеме (рисунок 3.1, в) слабое влияние оказывает нелинейность характеристик элементов, охваченных обратной связью. К недостаткам компенсационных преобразователей следует отнести более сложную схему практической реализации, чем дифференциальных преобразователей и наличие аддитивных погрешностей.
Дата добавления: 2022-02-05; просмотров: 538;
Поиск по сайту
Узнать еще
- II Классификация САSЕ-средств
- II. Классификация документов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Классификация методов воспитания.
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ
- III.2.3. ПРИЧИНЫ НАРУШЕНИЙ ЗРЕНИЯ. КЛАССИФИКАЦИЯ НАРУШЕНИЙ ЗРИТЕЛЬНОЙ ФУНКЦИИ У ДЕТЕЙ
- VI.2. Классификация месторождений нефти и газа
- VI.III. VI. Генетическая классификация складок.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
