Параметрические датчики
Как было ранее установлено существующие в настоящее время измерительные преобразователи (датчики) в основном классифицируются на параметрические и генераторные. Наиболее простым видом параметрических преобразователей является резисторные, которые предусматривают изменение под действием физических величин активного сопротивления электрической цепи преобразователя.
Потенциометрический преобразователь (датчик) представляет собой переменный резистор, включенный по схеме делителя напряжения (рисунок 3.3, а). движок (скользящий контакт) данного резистора перемещается в соответствии со значением измеряемой неэлектрической величины (линейные или угловые перемещения). Выходной величиной потенциометрических преобразователей является активное сопротивление, распределённое линейно или по некоторому закону по пути движка. Если перемещение движка является следствием воздействия на него какого-либо промежуточного элемента (например, мембраны, сульфона), то выходной величиной может быть усилие, давление, ускорение, расход.
В датчиках систем управления наиболее широко используют проволочный потенциометрический преобразователь непрерывной намотки. Он представляет собой устройство, состоящее из каркаса, на который намотан в один раз изолированный провод с высоким удельным сопротивлением, и подвижного контакта (движка), скользящего по виткам провода. Для обмотки потенциометра применяют провод из константана, а также сплавы на основе платины и серебра. Для прецизионных датчиков диаметр провода составляет (0,03…0,1) мм.
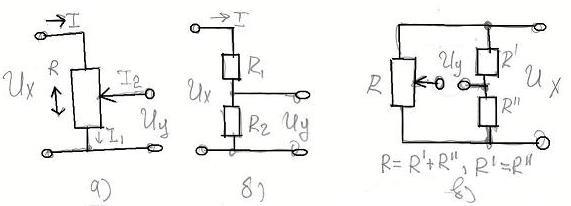
Рисунок 3.3. схемы включения потенциометрических датчиков
С учётом электрической (рисунок 3.3, а) и эквивалентной (рисунок 3.3,б) схем, а также принимая во внимание, что входное сопротивление операционных усилителей, обычно включаемых на входе потенциометрических преобразователей весьма велико (сопротивление нагрузки преобразователя близко к бесконечности) выражение для выходного напряжения преобразователя (статическую характеристику) можно представить в виде.
 . (3.8)
. (3.8)
В зависимости от линейного l или углового  положения движка потенциометра изменяются соотношения значений
положения движка потенциометра изменяются соотношения значений  и
и  . Например, при повороте движка потенциометра, одно из сопротивлений
. Например, при повороте движка потенциометра, одно из сопротивлений  увеличится другое
увеличится другое  уменьшается или наоборот. Статическая характеристика
уменьшается или наоборот. Статическая характеристика  , применяемых в системах управления прецизионных потенциометрических преобразователей линейна с погрешностью 0,1 %. Наиболее распространённая мостовая схема включения потенциометрических датчиков представлена на рисунке 3.3, в.
, применяемых в системах управления прецизионных потенциометрических преобразователей линейна с погрешностью 0,1 %. Наиболее распространённая мостовая схема включения потенциометрических датчиков представлена на рисунке 3.3, в.
Такие достоинства потенциометрических преобразователей, как простота конструкции, малые габаритные размеры, достаточная мощность, работа на постоянном и переменном токах, обеспечили их широкое распространение в системах управления. К недостаткам данных преобразователей можно отнести наличие скользящего контакта, что снижает их надёжность и ступенчатость статической характеристики.
Тензометрические преобразователи (тензорезисторы) также широко используются в системах управления действие тензорезисторов основано на свойстве металлической проволоки изменять сопротивление при деформации под действием внешней среды. Электрическое сопротивление проволоки  определяется выражением ( ).
определяется выражением ( ).
При растягивании проволоки в пределах упругой деформации её сопротивление  изменяется (увеличивается) из-за увеличения длины l, уменьшения площади сечения и увеличения удельного сопротивления ρ. Очевидно, при сжимании проволоки уменьшится из-за уменьшения l, увеличения q и увеличения ρ.
изменяется (увеличивается) из-за увеличения длины l, уменьшения площади сечения и увеличения удельного сопротивления ρ. Очевидно, при сжимании проволоки уменьшится из-за уменьшения l, увеличения q и увеличения ρ.
Конструктивно тензометрические преобразователи представляют собой проволочную спираль (рисунок 3.4, а), наклеенную специальным клеем на тонкую плёнку (бумагу, лакоткань), которая фиксируется на упругом элементе (первичном преобразователе).
В качестве проволоки в тензорезисторах чаще всего используется константановый провод диаметром 20 мкм, имеющий минимальную зависимость  от температуры.
от температуры.
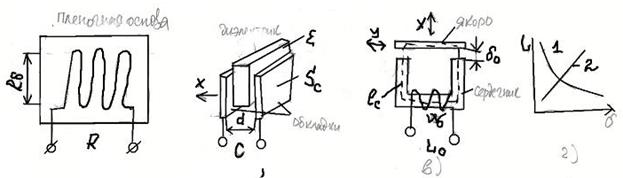
Рисунок 3.4. Параметрические датчики а – тензометрический,
б – ёмкостной, в – индуктивный, г – статическая характеристика
индуктивного датчика
В последнее время распространение получили тензорезисторы с тонкопленочными чувствительными элементами из различных тензочувствительных сплавов, которые наносятся, например, методом резисторного испарения на металлические подложки, предварительно покрытые изоляционным слоем. Достоинством таких тензорезисторов является возможность создания миниатюрных датчиков, исключение клея, наличие атомарной связи изоляционных и чувствительных элементов, приводящее к высокой стабильности характеристик.
Если проволока тензорезистора (рисунок 3.4, а) подвергается упругой деформации, то между относительным изменением сопротивления проволоки  и её относительным удлинением
и её относительным удлинением  существует зависимость, определяемая выражением.
существует зависимость, определяемая выражением.
 . (3.9)
. (3.9)
В выражении (3.9) коэффициент относительной чувствительности  называют тензочувствительностью тензорезистора. Величина зависит не только от состава сплава проволоки, но и от технологии её обработки. Например, для константана
называют тензочувствительностью тензорезистора. Величина зависит не только от состава сплава проволоки, но и от технологии её обработки. Например, для константана  .
.
Чувствительность тензопреобразователя может быть определена из следующего соотношения.
 . (3.10)
. (3.10)
Статическая характеристика тензопреобразователя в общем виде является нелинейной функцией.
Проволочные (фольговые) тензорезисторы используются в качестве датчиков малых перемещений, деформаций, механических напряжений, усилий и вибраций.
Ошибки преобразования с помощью тензорезисторов обуславливаются в основном зависимостью сопротивления проволоки (фольги) преобразователя от температуры и не превышают 1 %.
Изменение сопротивления  провода от температуры окружающей среды, вызываемое очевидным изменением параметров l, q в формуле ( ) позволяет использовать проволочные спирали (рисунок 3.4, а) в качестве датчиков температуры.
провода от температуры окружающей среды, вызываемое очевидным изменением параметров l, q в формуле ( ) позволяет использовать проволочные спирали (рисунок 3.4, а) в качестве датчиков температуры.
Для медной проволоки зависимость сопротивления от температуры является линейной и выражается соотношением.
 (3.11)
(3.11)
где  – сопротивление проводника при температуре 0oС;
– сопротивление проводника при температуре 0oС;  – температурный коэффициент электрического сопротивления проводника;
– температурный коэффициент электрического сопротивления проводника;  – превышение измеряемой температуры относительно 0oС.
– превышение измеряемой температуры относительно 0oС.
Чувствительность проволочного терморезистора определяется выражением.
 . (3.12)
. (3.12)
Величину  термопреобразователя (рисунок 3.4, а) может быть повышена путём выбора материала с большим и (используя провод с минимально допустим диаметром и большой величиной l).
термопреобразователя (рисунок 3.4, а) может быть повышена путём выбора материала с большим и (используя провод с минимально допустим диаметром и большой величиной l).
В интервале измеряемых температур  (-50...+150) оС, погрешность медного терморезистора составляет (0,5...1) %. Существенным недостатком терморезисторов данного типа является их инерционность. Постоянная времени для терморезисторов в зависимости диаметра проволоки и конструкции преобразователя может быть от 0,05 до 5 с.
(-50...+150) оС, погрешность медного терморезистора составляет (0,5...1) %. Существенным недостатком терморезисторов данного типа является их инерционность. Постоянная времени для терморезисторов в зависимости диаметра проволоки и конструкции преобразователя может быть от 0,05 до 5 с.
Емкостные преобразователи. В емкостных преобразователях измеряемая неэлектрическая величина преобразуется в изменение емкости электрического конденсатора. Емкость конденсатора зависит от трех его параметров: площади обкладок Sc (рисунок 3.4, в), расстояния между ними d и диэлектрической проницаемостью ε среды между обкладками. Емкость плоского конденсатора (рисунок 3.4, б) определяется формулой.
 . (3.13)
. (3.13)
В соответствии с числом параметров (3.13), определяющих емкость конденсатора, различают три типа емкостных преобразователей: с изменяющейся площадью SC обкладок (обкладки смещаются относительно друг друга при d = const); с изменяющимся расстоянием d между обкладками при S/C = const; с изменяющейся диэлектрической проницаемостью  при фиксированных значениях d и SC (смещение диэлектрика относительно обкладок). Очевидно, что емкостные преобразователи с изменяемыми параметрами и SC имеют линейные статические параметры (3.13), а преобразователи с изменяемым параметром d нелинейную характеристику.
при фиксированных значениях d и SC (смещение диэлектрика относительно обкладок). Очевидно, что емкостные преобразователи с изменяемыми параметрами и SC имеют линейные статические параметры (3.13), а преобразователи с изменяемым параметром d нелинейную характеристику.
В системах управления наибольшее распространение получили емкостные преобразователи с изменением расстояния между обкладками конденсатора по оси Х (рисунок 3.4, б).
Для данного типа емкостных преобразователей выражение (3.13) можно записать в виде.
 , (3.14)
, (3.14)
где d0 – начальное расстояние между обкладками; Х – величина смещения обкладок по оси x.
С учетом зависимости (3.14) выражение для оценки чувствительности емкостных преобразователей с изменяемым воздушным зазором можно записать в виде.
 . (3.15)
. (3.15)
Таким образом, чем меньше воздушный зазор (d0 + x), тем больше чувствительность преобразователя.
Емкостные преобразователи могут иметь самую разнообразную конструкцию. Они используются для преобразования механических перемещений (линейных и угловых), геометрических размеров деталей (емкостные микрометры, толщинометры), расстояния между деталями и вибраций. Преобразователи с изменяющейся используются для измерения состава физических смесей, уровня жидкости и ряда других величин.
Поскольку емкость Сх данных преобразователей имеет небольшое значение они практически являются элементом минимальной инерционностью.
Основными достоинствами ёмкостных преобразователей являются большая чувствительность, малая мощность потребления, небольшие габариты и простота конструкции. К недостаткам следует отнести сильное влияние паразитных ёмкостей и электрических полей на точностные характеристики и необходимость применения высокочастотного источника питания.
Особенно сильное внимание на погрешность преобразования в данном случае оказывают изменения температуры и влажности окружающей среды (изменяются SC и  ).
).
В результате указанных выше факторов погрешность ёмкостных преобразователей достигает (1...3) %.
Индуктивные преобразователи. Большое распространение в системах управления имеют индуктивные преобразователи, действие которых основано на изменении индуктивности электромагнитной системы под действием входной преобразуемой величины. Конструкция индуктивного преобразователя с изменяющимся зазором представлена на рисунке 3.4, в. Так как магнитное сопротивление сердечника и перемещаемого якоря мало, индуктивность обмотки резко изменяется при изменении величины воздушного зазора  по направлению оси X (рисунок 3.4, в).
по направлению оси X (рисунок 3.4, в).
Если пренебречь магнитными потоками рассеяния и потерями в сердечнике, то согласно формул (3.4)-(3. ) индуктивность обмотки преобразователя (рисунок 3.4, в) можно определить из выражения.
 , (3.16)
, (3.16)
где  – число витков обмотки преобразователя;
– число витков обмотки преобразователя;  ,
,  – длина и площадь поперечного сечения магнитного сердечника; ,
– длина и площадь поперечного сечения магнитного сердечника; ,  – длина и площадь воздушного зазора (для рассматриваемой конструкции преобразователя (
– длина и площадь воздушного зазора (для рассматриваемой конструкции преобразователя (  );
);  ,
,  – магнитные проницаемости соответственно воздуха и материала сердечника.
– магнитные проницаемости соответственно воздуха и материала сердечника.
При сравнительно большом зазоре , когда его магнитное сопротивление значительно больше магнитного сопротивления сердечника (  ), выражение для определения L0 индуктивного преобразователя примет следующий вид.
), выражение для определения L0 индуктивного преобразователя примет следующий вид.
 . (3.17)
. (3.17)
Приведённые выражения (3.16), (3.17) для индуктивных преобразователей с перемещением якоря по оси Y (с изменением параметров SC, ). На рисунке 3.4, г представлены статические характеристики индуктивных преобразователей с перемещением якоря по оси Х (кривая 1) и оси Y (кривая 2).
Чувствительность индуктивного преобразователя (рисунок 3.4, в) с перемещением якоря по оси Х согласно (3.17) составит.
 , (3.18)
, (3.18)
где  – начальное значение воздушного зазора между якорем и сердечником преобразователя; Х – величина смещения якоря по оси Х.
– начальное значение воздушного зазора между якорем и сердечником преобразователя; Х – величина смещения якоря по оси Х.
Как видно из выражения (3.18) чувствительность индуктивного преобразователя с перемещением якоря по оси Х (рисунок 3.4, в) обратно пропорциональна квадрату воздушного зазора  . Поэтому данная разно-видность индуктивных преобразователей чувствительны при малых зазорах
. Поэтому данная разно-видность индуктивных преобразователей чувствительны при малых зазорах
и реагируют при изменении зазора на (0,1...0,5) мкм. Диапазон измерений перемещений по оси Х индуктивным преобразователями (рисунок 3.4, в) имеет значение от 0,01 мм до 2 мм. При больших зазорах статическая характеристика (рисунок 3.4, г) имеет существенную нелинейность.
Поэтому при измерении относительно больших перемещений (до 8 мм) обычно используют индуктивные преобразователи с перемещением якоря по оси Y (рисунок 3.4, в), которые имеют высокую линейность статической характеристики 2 (рисунок 3.4, г). Недостатком данного типа индуктивных преобразователей является их более низкая чувствительность, чем у преобразователей с перемещением якоря по оси Х.
Погрешность измерения линейных перемещений индуктивными преобразователями в основном вызываются нестабильностью амплитуды и частоты питающих напряжений, а также изменениями температуры окружающей среды. Она ниже чем у ёмкостных и составляет (0,1...1,5) %.
Динамические свойства индуктивных преобразователей зависят от инерционности подвижных частей (массы подвижного якоря).
Дата добавления: 2022-02-05; просмотров: 845;
Поиск по сайту
Узнать еще
- Акустические датчики
- Взвешивающие устройства АШЛ - датчики натяжения каната
- Генераторные датчики
- Гидростатические датчики уровня
- Гирокомпасы как датчики направлений. Принципы работы ГК, их особенности. Эксплутационные проверки.
- Датчики (измерительные преобразователи).
- ДАТЧИКИ ВЫСОТЫ И СКОРОСТИ
- Датчики двигателей с впрыском топлива

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
