ДАТЧИКИ ВЫСОТЫ И СКОРОСТИ
Принцип действия датчиков высоты и скорости основан на измерении статического и динамического давлений и их преобразования в электрические сигналы. Эти давления отбираются с помощью штатного приемника воздушного давления (ПВД) и подаются непосредственно или по трубопроводу в соответствующую полость датчика. Вид упругого чувствительного элемента датчика определяется видом измеряемого давления. В датчиках высоты и скорости применяются анероидные и манометрические упругие чувствительные элементы. Статическое давление подается в корпус датчика.
Для измерения высоты наиболее широко используется барометрический метод, основанный на зависимости между абсолютным давлением в атмосфере и барометрической высотой. Связь между высотой полета и давлением в атмосфере определяется при помощи таблиц так называемой стандартной атмосферы. Градуировка датчиков барометрической высоты осуществляется с использованием гипсометрических таблиц.
Для измерения воздушной скорости чаще всего применяется манометрический метод, основанный на измерении разности между полным напором и статическим давлением воздуха. При этом используются датчики, чувствительные элементы которых представляют собой мембранные коробки. Принципы измерения давлений с использованием упругих чувствительных элементов иллюстрируются рисунком 1.
|
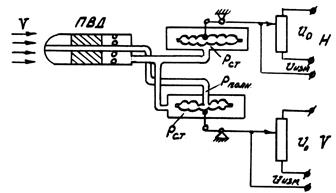
Рис. 1. Схема измерения статического Рст и полного Рполн давлений, используемых при измерении барометрической высоты Н и скорости полета V.
Для чувствительных элементов, используемых в датчиках давления, справедливо следующее статическое соотношение между прогибом и давлением:  ,
,
где Р – давление;. R – радиус мембраны; h – толщина мембраны; Е – модуль упругости материала мембраны;  – прогиб; а и b – коэффициенты, зависящие от заделки кромки мембраны.
– прогиб; а и b – коэффициенты, зависящие от заделки кромки мембраны.
Мембранные коробки бывают двух типов: анероидные – для измерений абсолютных давлений, в частности, высоты полета, и манометрические – для измерения перепадов давления, в частности, воздушной скорости.
Если пренебречь инерционностью чувствительного элемента, то уравнение, описывающее работу датчика давления, можно записать в виде
при начальном условии  . Здесь
. Здесь  – давление, действующее в полости датчика;
– давление, действующее в полости датчика;  – давление на входе датчика;
– давление на входе датчика;  – постоянная времени.
– постоянная времени.
В практике летных испытаний для измерения высоты и скорости полета широкое применение получили потенциометрические датчики с регистрацией на аппаратуру точной магнитной записи. Применяются также комбинированные оптические самописцы, снабженные пневмоузлами высоты и скорости. Для точного измерения высоты и скорости (с погрешностью  1%) применяются датчики и приборы с частотным и компенсационным методами преобразования с теми же регистрирующими устройствами.
1%) применяются датчики и приборы с частотным и компенсационным методами преобразования с теми же регистрирующими устройствами.
Все датчики устанавливаются в приборном отсеке самолета в соответствии с монтажной схемой измерительного оборудования. Установка датчиков относительно оси самолета произвольная.
Потенциометрические датчики барометрической высоты и воздушной скорости входят в обширную группу средств измерений медленноменяющихся параметров давления. Принцип работы датчика основан на изменении активного сопротивления потенциометра при перемещении движка пропорционально измеряемому давлению. Преобразование сигнала в датчике высоты происходит по схеме  . С изменением высоты изменяется статическое давление рст, воспринимаемое анероидной коробкой, прогиб W0 жесткого центра которой, через механизм передачи, приводит к перемещению l движка. При этом изменяется приращение сопротивления
. С изменением высоты изменяется статическое давление рст, воспринимаемое анероидной коробкой, прогиб W0 жесткого центра которой, через механизм передачи, приводит к перемещению l движка. При этом изменяется приращение сопротивления  потенциометра и, соответственно, выходное электрическое напряжение
потенциометра и, соответственно, выходное электрическое напряжение  , которое и является мерой измеряемой высоты Н. Схема преобразования сигнала в датчике скорости, по аналогии с датчиком высоты, может быть представлена в виде
, которое и является мерой измеряемой высоты Н. Схема преобразования сигнала в датчике скорости, по аналогии с датчиком высоты, может быть представлена в виде  .
.
Датчики характеризуются величиной омического сопротивления потенциометра, геометрическими размерами, линейностью характеристики, допуском на общее сопротивление, максимальной рабочей мощностью рассеяния, сроком службы при заданных условиях, а также необходимой скоростью вращения оси и рабочим режимом в различных условиях эксплуатации. Перечисленные параметры формируют и погрешность измерения. Наиболее весомой составляющей ее является нелинейность градуировочной характеристики датчика.
При линейном законе распределения сопротивления по длине потенциометра характеристика его в режиме холостого хода (при  ) линейна. При нагрузке (
) линейна. При нагрузке (  ) характеристика потенциометра может быть нелинейной, что обусловлено шунтирующим действием сопротивления нагрузки RH. При
) характеристика потенциометра может быть нелинейной, что обусловлено шунтирующим действием сопротивления нагрузки RH. При  нелинейность не превышает 1%. Поэтому, когда нагрузкой датчика является сравнительно низкоомное выходное устройство светолучевого осциллографа или в случае параллельной работы аппаратуры точной магнитной записи и светолучевого осциллографа (RH = 10...100 Ом) необходимо в цепь нагрузки включать добавочное сопротивление, обеспечивающее вышеуказанное соотношение. С помощью этого же сопротивления выбирается также необходимый масштабный коэффициент преобразования с конкретным типом гальванометра.
нелинейность не превышает 1%. Поэтому, когда нагрузкой датчика является сравнительно низкоомное выходное устройство светолучевого осциллографа или в случае параллельной работы аппаратуры точной магнитной записи и светолучевого осциллографа (RH = 10...100 Ом) необходимо в цепь нагрузки включать добавочное сопротивление, обеспечивающее вышеуказанное соотношение. С помощью этого же сопротивления выбирается также необходимый масштабный коэффициент преобразования с конкретным типом гальванометра.
Частотные датчики. Принцип действия датчика основан на измерении собственной частоты поперечных колебаний механического резонатора, изменяющейся пропорционально измеряемому давлению. В качестве резонатора применяется чаще всего плоская металлическая пластинка (струна), средняя секция которой крепится к жесткому центру мембраны, а крайние – к неподвижному основанию.
Схема преобразования сигнала в частотном датчике может быть представлена следующим образом: 
В процессе работы датчика перемещение W0 центра соответствующей коробки мембраны вызывает прогиб W0П средней секции пластинки. При этом, изменяется ее жесткость N, а, следовательно, и собственная частота f0. Она преобразуется в частоту синусоидальных колебаний или в последовательность импульсов ТИМП.
Преобразователи этого типа называют иногда струнными или вибрационно–частотными датчиками, а также датчиками с частотным выходом.
Функциональная схема датчика, применяемого в практике летных испытаний (см. рис. 2), содержит резонатор, возбудитель, приемник сигналов резонансного контура, а также усилитель и преобразователь сигнала датчика.
Колебания резонатора возбуждаются и поддерживаются системой возбудитель–приемник. Функции возбуждения и приема колебаний выполняются электромагнитом с катушкой, расположенной с некоторым зазором около поверхности колеблющейся пластинки. Система работает в режиме автоколебаний с частотой собственного резонанса. Сигнал с выхода резонатора после усиления в усилителе поступает через возбудитель на резонатор. При этом реализуется положительная обратная связь. При коэффициенте относительного затухания резонатора меньше единицы он возбуждается на собственной частоте, которая зависит от измеряемого значения давления.
|
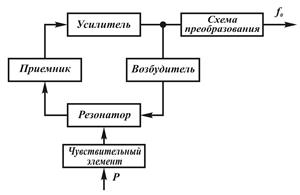
Рис. 2. Функциональная схема частотного датчика
Выходным сигналом датчика является период следования прямоугольных импульсов положительной полярности. Изменение периода следования импульсов по частоте лежит в пределах от 2000 до 5000 Гц. Схемы усиления и преобразования сигнала датчика конструктивно выполнены в отдельном блоке.
Относительная предельная погрешность датчика определяется, в основном, температурной погрешностью и может быть оценена выражением:  . Здесь k – температурный коэффициент (k = l,8 при tcp = -600C; k = 1,2 при tcp = 60°C), δ –погрешность образцового средства измерений.
. Здесь k – температурный коэффициент (k = l,8 при tcp = -600C; k = 1,2 при tcp = 60°C), δ –погрешность образцового средства измерений.
Компенсационные приборы. Принцип действия прибора основан на автоматическом отслеживании перемещения мембраны датчика, пропорционально измеряемому давлению. Отличительной особенностью схемы такого прибора, по сравнению со схемой прибора прямого преобразования, является то, что в ней имеются цепи как прямого, так и обратного преобразования. Структурная схема компенсационного прибора показана на рис. 3.
|
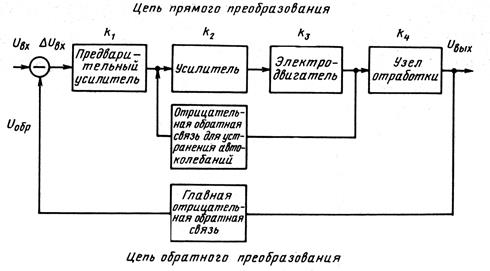
Рис. 3. Структурная схема компенсационного прибора.
На выходе цепи прямого преобразования осуществляется сравнение (компенсация) входной измеряемой величины  и величины
и величины  цепи обратного преобразования, которая однородна с величиной и имеет при установившемся режиме противоположный знак. При подаче на вход датчика сигнала , выходной сигнал
цепи обратного преобразования, которая однородна с величиной и имеет при установившемся режиме противоположный знак. При подаче на вход датчика сигнала , выходной сигнал  , а, следовательно, и будут возрастать до тех пор, пока сигналы и не станут равны. При этом величина является мерой измеряемой величины .
, а, следовательно, и будут возрастать до тех пор, пока сигналы и не станут равны. При этом величина является мерой измеряемой величины .
Для цепи обратного преобразования  (1)
(1)
где  – коэффициент преобразования цепи обратного преобразования.
– коэффициент преобразования цепи обратного преобразования.
При полной компенсации  (2)
(2)
Этот режим имеет место в приборах, у которых в цепи прямого преобразования предусмотрено интегрирующее звено. Примером такого звена может быть электродвигатель, для которого угол поворота вала определяется интегралом по времени от приложенного напряжения. В этом случае, учитывая (1) и (2), получим
 .
.
Следовательно, в момент компенсации сигнал на выходе прибора пропорционален входному сигналу и не зависит от коэффициентов преобразования  цепи прямого преобразования. Таким образом, решающим преимуществом компенсационных приборов является независимость чувствительности и погрешности от величины и стабильности параметров элементов прямой цепи.
цепи прямого преобразования. Таким образом, решающим преимуществом компенсационных приборов является независимость чувствительности и погрешности от величины и стабильности параметров элементов прямой цепи.
Компенсационные приборы имеют высокую чувствительность, осуществляют точное кинематическое преобразование и реализацию минимального перемещения мембранных коробок. Все это делает возможным полностью использовать высокие упругие свойства мембран. Поэтому в приборах применяются мембранные коробки с перемещением жесткого центра от нескольких десятых до одного – двух миллиметров. Для уменьшения погрешности измерения компенсационными приборами с учетом регистрирующего устройства эти приборы выполняются многошкальными (многоступенчатыми). Суммарная погрешность многошкального прибора с учетом погрешности регистратора может быть представлена в виде  ,
,
где  – погрешности соответственно прибора и регистратора; n – число шкал (ступеней).
– погрешности соответственно прибора и регистратора; n – число шкал (ступеней).
|
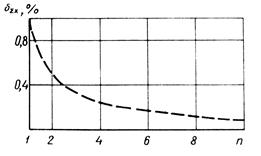
 в зависимости от числа шкал (ступеней) в приборе при типовых начальных условиях:
в зависимости от числа шкал (ступеней) в приборе при типовых начальных условиях:  .
.
Рис. 4. Зависимость суммарной погрешности датчика от числа ступеней в приборе.
Дата добавления: 2020-10-14; просмотров: 1258;
Поиск по сайту
Узнать еще
- А) Деградация почв и определение ее скорости
- Акустические датчики
- АНАЛИТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЕТРА ПО ИЗВЕСТНЫМ УГЛУ СНОСА, ПУТЕВОЙ И ВОЗДУШНОЙ СКОРОСТИ, МАГНИТНОМУ КУРСУ САМОЛЕТА С ПОМОЩЬЮ НЛ-10М
- Аналог скорости. Аналог ускорения
- Б.3 Определение диапазона трансмиссии и скорости движения мобота.
- Безопасные высоты полета
- В зависимости от скорости ветра
- В случае векторного способа задания движения вектор скорости точки равен первой производной по времени от ее радиус-вектора

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
