Динамика двигателя ПТ с учетом индуктивности якоря
Будем рассматривать от момента пуска: 
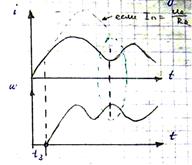 t3 – время запаздывания
t3 – время запаздывания
en – противо ЭДС (создается изменением скорости)
ЭДС самоиндукции (создается изменением тока)
LМС – магнитные системы (весь магнитопровод, нелинейный и неоднородный)
iвт – вихревые токи
 - ЭДС магнитной системы
- ЭДС магнитной системы
Uос – напряжение обратной связи по скорости
Работает:  .
.
Если 4Tя>TM, то возникают колебания за счет перерастания колебаний мех. системы в колебания Эл-м. Системы и наоборот
Фазовый портрет двигателя постоянного тока:

31 Переходной процесс двигателя w=f(t) с учетом индуктивности якоря

Здесь 2-а источника инерционности: I и L.
Мы пренебрегаем Мс – идеальный холостой ход
 - эл. мех. постоянная
- эл. мех. постоянная
- постоянная времени обмотки якоря
 - всегда!
- всегда!
 , где Сх=0,4 – если система без компенсационной обмотки; Сх=0,1 - если система с компенсационной обмоткой.
, где Сх=0,4 – если система без компенсационной обмотки; Сх=0,1 - если система с компенсационной обмоткой.

Решением этого уравнения является:  , где a1, a2 – корни характеристического уравнения:
, где a1, a2 – корни характеристического уравнения:  .
.
Постоянная интегрирования A1, A2 находятся из начальных условий t=0 и  .
.
Решение: 


 - для расчета переходного процесса
- для расчета переходного процесса
Дата добавления: 2019-12-09; просмотров: 724;
Поиск по сайту
Узнать еще
- Tермодинамика денатурации
- А) Последовательное соединение индуктивности и активного сопротивления
- Автоматизация пуска и торможения 3-фазного асинхронного двигателя
- Автоматическое регулирование числа оборотов двигателя
- Алгоритм расчета пусковой диаграммы асинхронного двигателя с фазным ротором.
- Алгоритмы анализа последствий неадекватного поведения с учетом влияния случайных факторов (А8-А9)
- Аналитический метод исследования переходных процессов электропривода на базе математической модели двигателя постоянного тока
- Антропометрические и масс-инерционные характеристики тела человека. Динамика опорно-двигательного аппарата (ОДА)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
